博文
数据驱动控制与系统辨识控制
|
系统辨识,才是工业智能的灵魂---朱豫才
最近几年,数据驱动控制流行起来。不懂系统辨识的控制专家大搞数据驱动控制,一些系统辨识“专家”也跟风搞了起来。“专家”打引号是因为他们只是理论研究系统辨识而不懂工业系统辨识。
搞数据驱动控制的理由及动机,第一条就是系统辨识建模太难,成本太高。不懂辨识的人这样说情有可原,辨识“专家”也这样说,是为作新诗强说愁。
最近我一直在想,数据驱动控制与基于系统辨识的控制是什么关系,难道自己搞了一辈子的系统辨识,快没用了?控制技术,到底是模型为王还是数据为王?带着这些问题读了一些数据驱动控制的文章。
自动控制系统有两种典型应用场景。第一种是跟踪控制,比如机器人和飞行器控制。这种场景下不可测干扰和噪声较少,理论研究时可以假设无干扰。第二种是抗干扰控制,即设定值不变,控制器的作用是降低不可测干扰和噪声对被控变量的影响,流程工业自动控制系统90%以上属于抗干扰控制,比如炼油厂、(煤)化工厂、发电厂、钢铁厂、水泥厂、玻璃厂、造纸厂等等。实际场景可以是前面两种的混合。
数据驱动控制分为直接数据驱动控制和间接数据驱动控制。以模型预测控制(MPC)算法为例,直接数据驱动控制不使用对象模型,使用闭环数据进行预测和控制计算;间接数据驱动使用一个初始模型进行预测和控制计算。间接数据驱动控制其实使用了粗糙的系统辨识建立了一个粗糙的对象模型。
传统的模型预测控制(MPC)是基于系统辨识的控制,即先辨识一个精确的对象模型,然后使用模型进行预测和控制计算。当前几乎所有的工业MPC控制系统都是基于系统辨识的MPC。
下面这篇文章研究了直接数据驱动控制与间接数据驱动控制的关系,并做了一些仿真练习:
Dörfler, F., Coulson, J., & Markovsky, I. (2022). Bridging direct & indirect data-driven control formulations via regularizations and relaxations. IEEE Transactions on Automatic Control. VOL. 68, NO. 2, pp. 883-897.
第一作者Dörfler是数据驱动控制的大牛,论文引用量挺高。
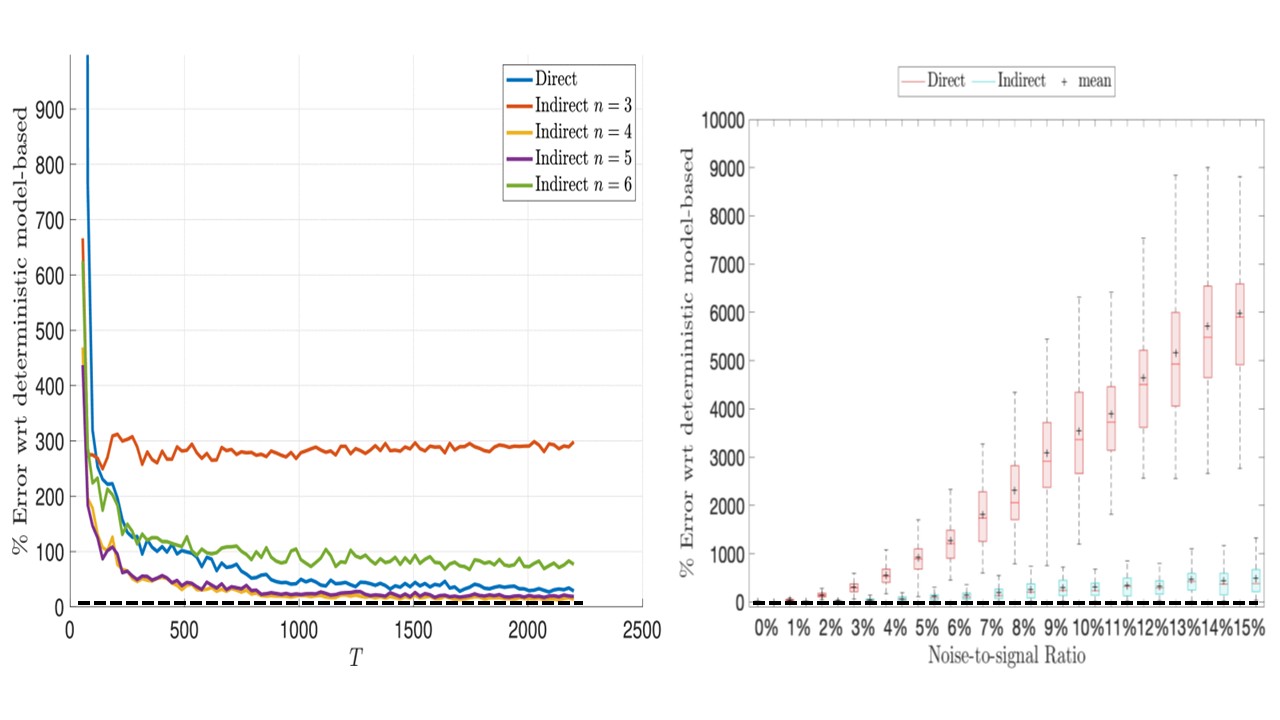
仿真例子中,被控对象是一个4阶线性时不变系统。作者比较了直接数据驱动控制、间接数据驱动控制和基于系统辨识控制(文中叫基于确定模型,即无误差模型)。下面两个图的纵坐标是直接数据驱动控制误和差间接数据驱动控制误差相对于确定模型控制误差的百分比。相对误差100%意味着该控制器控制误差比确定模型控制器控制误差大一倍。
左图是无不可测干扰和噪声条件下,跟踪控制的相对误差随采样点数的变化情况。可以看出,当采样点数大于1000,相对误差小于30%,但间接数据驱动控制误差更小,显示了初始模型的有效性。然而,实际应用中无干扰、无噪声系统有多少呢?
然后,引入不可测干扰。右图中横轴是噪信比。图中,当噪信比15%时,间接数据驱动控制相对误差均值是500%,意味着误差比基于系统辨识控制误差大5倍,这比没有控制还差;噪信比14%时,直接数据驱动控制相对误差均值是6000%,意味着误差比基于系统辨识控制误差大60倍!!系统早停车或爆炸了。
同学会问,流程工业应用中,噪信比是多少?回答是50%以上。
看到这些结果,我悬起的心又回到了原处。模型,永远王道。
问题:强化学习控制是数据驱动控制还是基于系统辨识控制?
https://wap.sciencenet.cn/blog-862928-1511079.html
上一篇:灵魂拷问:PID还是MPC?
下一篇:为什么说流程工业大数据是大垃圾?