博文
事件触发观测下时滞马尔科夫跳跃系统广义记忆滑模控制
|
引用本文
杨玥, 黄佳男, 马宗方, 苏晓杰. 事件触发观测下时滞马尔科夫跳跃系统广义记忆滑模控制. 自动化学报, 2025, 51(7): 1673−1687 doi: 10.16383/j.aas.c240723
Yang Yue, Huang Jia-Nan, Ma Zong-Fang, Su Xiao-Jie. Generalized memory sliding mode control for time-delay Markov jump systems based on event-triggered observers. Acta Automatica Sinica, 2025, 51(7): 1673−1687 doi: 10.16383/j.aas.c240723
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c240723
关键词
时滞马尔科夫跳跃系统,动态事件触发观测器,广义记忆异步滑模控制器,反凸不等式
摘要
马尔科夫跳跃系统镇定过程常伴随通信信道堵塞、状态信息未知、时滞效应不全等问题. 基于此, 提出一种基于动态事件触发观测器的广义记忆异步滑模控制器. 其中动态事件触发观测器结合丢包补偿, 克服了已有文献单一考虑网络环境下频繁数据传输导致的通道堵塞问题. 针对观测时滞状态与控制器异步行为, 在滑模函数中引入时变时滞及其边界条件, 设计基于隐马尔科夫模型的广义记忆异步滑模控制器. 由于高效时滞利用率和多独立控制增益相互补偿, 闭环系统稳定性、收敛速度和超调等静态/动态性能较传统记忆/无记忆滑模控制器稳定提升. 同时, 为进一步耦合广义记忆控制时滞信息, 提出一组指数型反凸组合不等式, 通过预置指数型参数, 在不增加计算复杂度的前提下, 降低广义控制镇定条件保守性, 提升控制增益镇定精度. 最后通过数值算例和柔性机械臂实例验证了所提控制方案的有效性.
文章导读
机械臂、轮式机器人等实际系统在完成某些复杂任务时, 可能由于磨损、故障或外部冲击导致结构或参数的随机变化. 马尔科夫跳跃系统作为一类能够描述系统中随机切换现象的数学模型, 因而成为研究热点[1−8]. 然而, 由于实际系统的物理条件限制, 系统行为不仅受到随机切换的影响, 还受到时间延迟的影响. 而时间延迟的存在往往是系统性能变差和不稳定的根源. 例如, 在网络控制系统中, 数据传输的延迟和丢包问题会导致系统性能下降, 甚至崩溃. 因此, 研究者们开始关注时滞马尔科夫跳跃系统[9−13], 这类系统能够更准确地模拟现实世界中的动态行为, 尤其是在存在时间延迟的情况下. 时滞马尔科夫跳跃系统在随机切换和时间延迟的双重影响下, 其稳定性分析和控制策略设计更具挑战性.
时滞系统由于状态分量不可测量以及自身的脆弱性而难以直接控制. 因此, 基于状态观测器的控制设计受到广泛关注[14−15]. 例如文献[16]针对具有时变延迟的单侧Lipschitz切换系统, 研究基于观测器的非线性控制器设计问题; 文献[17]基于观测器, 研究时滞马尔科夫跳跃系统的有限时间异步滑模控制问题. 事件触发机制旨在在有限带宽下减少通信资源的占用, 它通过设计事件来控制数据是否传输, 这对时滞系统的稳定有重要意义, 近年来被广泛研究[18−19]. 例如, 文献[20]针对一类复杂的非线性动态系统, 研究基于观测器的事件触发滑模控制问题. 然而, 它并没有考虑在状态观测器的实现中, 输出测量值在通过网络传输时通常容易受到干扰, 出现数据包丢失的问题[21−23]. 文献[24]虽然通过设计分布式动态事件触发观测器避免了丢包问题, 但在实际应用中引入大量传感器, 极易致使累积误差加剧. 因此, 设计一个有效的考虑丢包问题的事件触发观测器是一个理论及工程意义兼具的话题.
得益于对系统模型不确定性和扰动的低敏感特性, 滑模控制能够提供强大的鲁棒性, 近年来在许多领域得到广泛应用[25−29]. 针对时滞系统的滑模控制问题也有丰富报道, 例如文献[30]研究了T−S模糊延迟系统的事件触发滑模控制问题, 文献[31]研究了具有时变延迟的T−S模糊马尔科夫跳跃系统的$ H_{\infty} $滑模控制问题. 然而通过大量文献调研发现, 现有的研究结果大多都与文献[30−31]存在相同规律, 所设计的滑模控制器只考虑系统本身状态信息, 其形式等效于$ u(t) = Kx(t)+\phi(t) $[32−33], 对于系统的时滞信息有所忽略, 导致系统的控制性能发挥不全. 不同于大多已有的无记忆滑模控制器, 文献[34]引入时变延迟项, 设计一种记忆滑模控制器, 其形式等效于$ u(t) = K_2x(t-\tau(t))+\phi(t) $, 进一步通过时滞信息利用率改善了系统的性能. 对于时滞系统的稳定而言, 除了时变延迟项, 时变延迟项的界限同样有重要意义. 记忆滑模控制器相比无记忆滑模控制器, 由于附加信息$ \tau(t) $的存在, 可以获得更好的性能[35−36]. 那么试想, 对于时变延迟$ \tau_1 \leq \tau(t) \leq \tau_2 $, 如果界限信息可用, 当$ \tau(t) = \tau_2 $时, 可得$ u(t)=K_2x\ \times (t-\tau_2)+\phi(t) $. 此时容易发现$ x(t-\tau_1) $被忽略, 这将导致状态信息利用不全, 保守性难以避免. 因此, 如何更充分地将时变延迟项的边界信息加以利用, 设计一种更加合理的记忆滑模控制器十分必要. 此外, 为在控制器中充分结合时滞信息, 反凸组合不等式受到广泛关注[37−38]. 然而现有的反凸组合不等式大多都是基于未知矩阵的. 例如文献[38]通过引入自由权矩阵来降低保守性, 但与此同时却增加了系统计算复杂度. 因此, 如何权衡保守性与计算复杂度也是一个有趣的话题. 另一方面, 控制器与原系统的模式由于传输延迟、丢包等现象, 难以保持同步. 然而现有结果较多是基于模态独立的[39−41], 忽略了原系统模式信息传输, 造成控制器模式匹配不当. 综上, 如何在传输延迟、丢包等情形下, 构建一套能够充分利用系统信息且具备记忆特性以及异步特性的滑模控制方案至关重要.
基于以上分析, 本文研究基于动态事件触发观测器的具有丢包的时滞马尔科夫跳跃系统广义记忆异步滑模控制问题. 本文的主要贡献如下:
1) 针对现有文献单一考虑时滞造成的通道堵塞问题或观测器实现中面临的丢包问题, 构造一种结合丢包补偿的动态事件触发观测器. 该观测器可以有效地解决通道堵塞问题及丢包问题.
2) 针对系统状态信息利用不充分造成的保守性问题以及时滞造成的系统异步行为问题, 设计一种低保守的广义记忆异步滑模控制器. 该控制器既包含时变延迟, 又包含时变延迟的可用范围, 同时容纳隐马尔科夫探测信息. 相比已有文献设计的控制器拥有更优越的性能, 同时其控制增益相互独立, 可灵活切换以进一步匹配使用环境.
3) 为更加充分利用时滞信息降低广义记忆异步滑模控制器的保守性, 设计一组参数可调的指数型反凸组合不等式来估计李雅普诺夫泛函中的二重积分导数项, 它通过引入可调参数替代已有文献的未知矩阵, 避免了保守性降低而导致的计算复杂度.
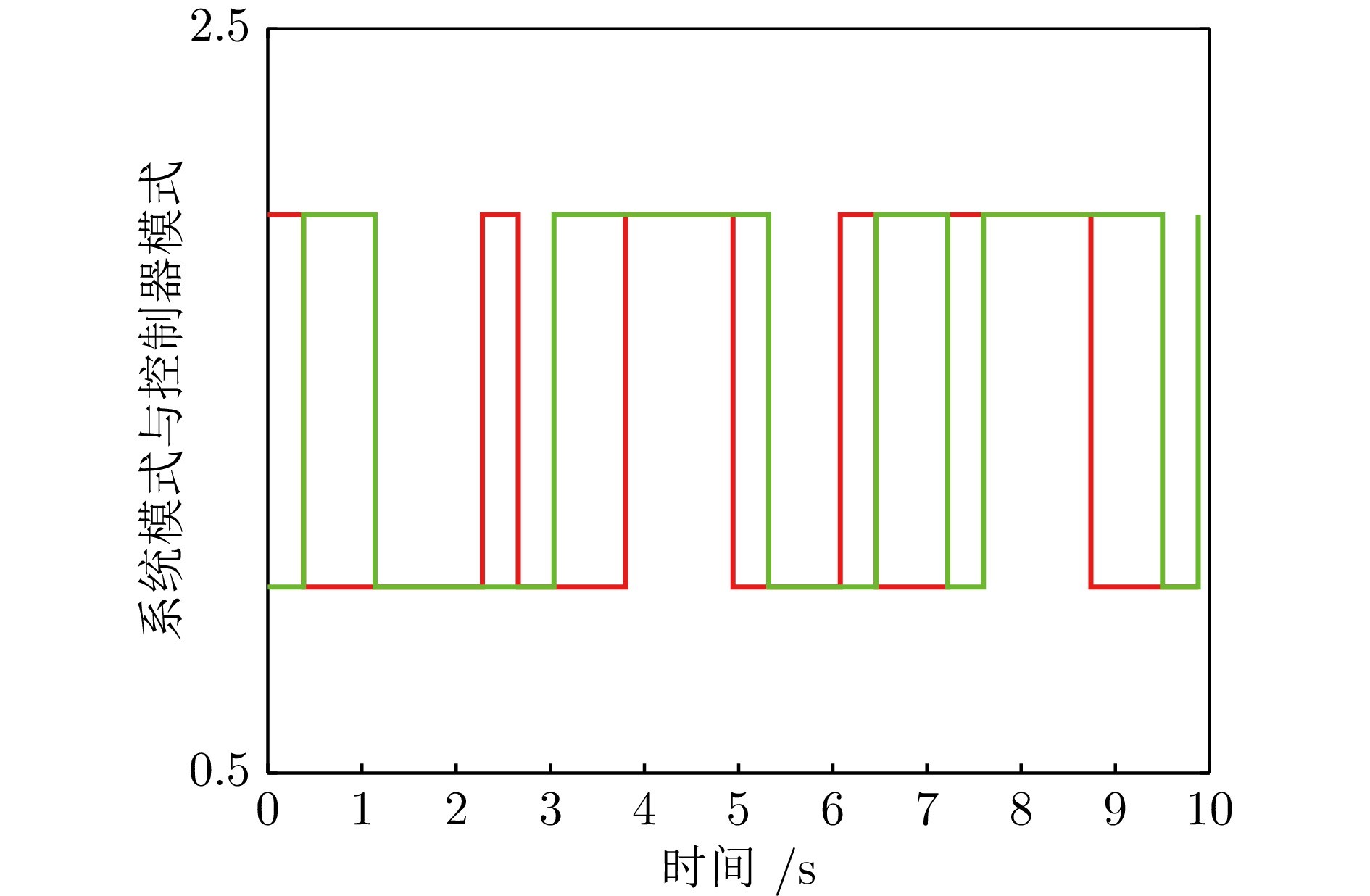
图 1 异步行为观测
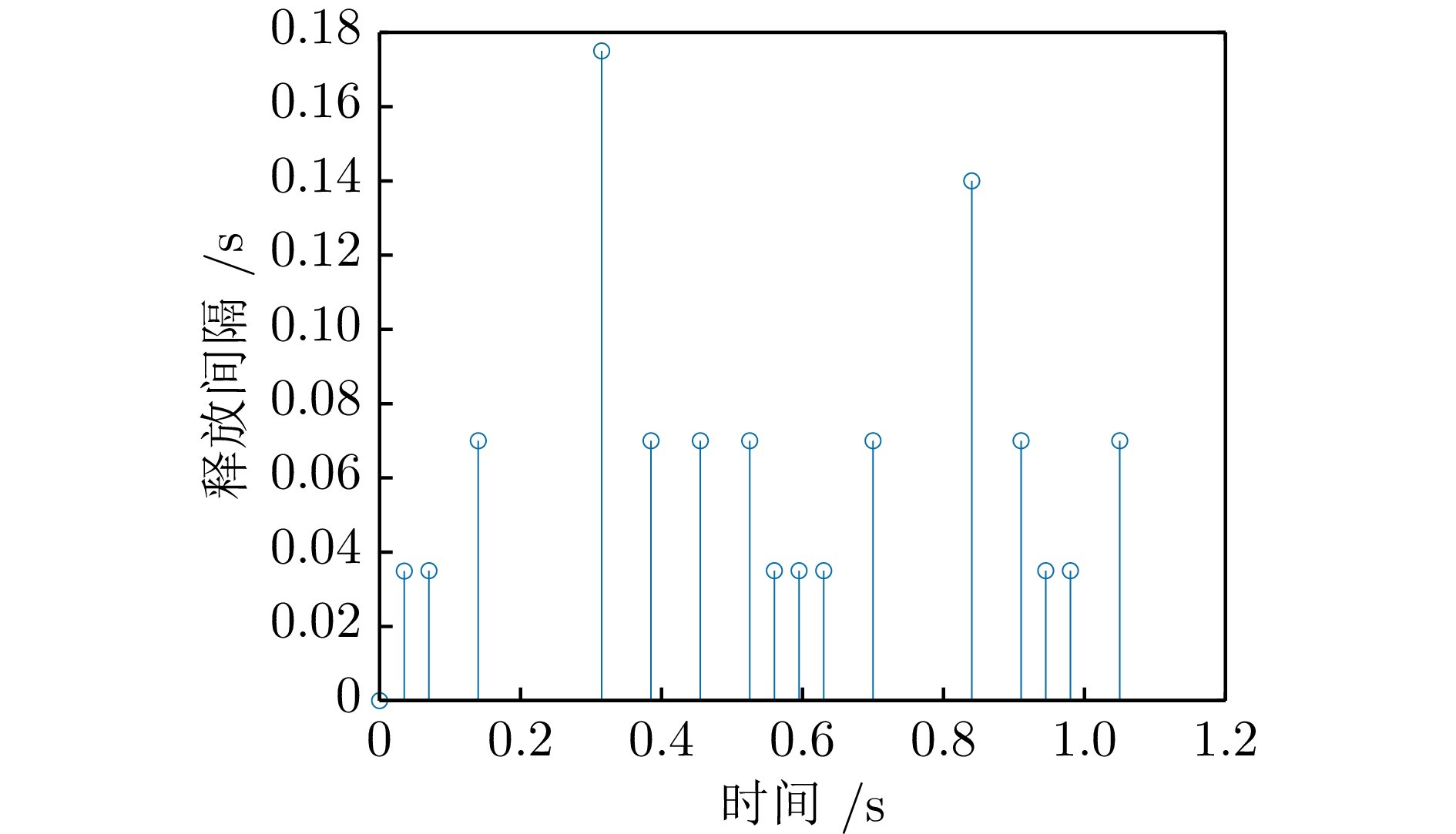
图 2 信号触发时刻与释放间隔
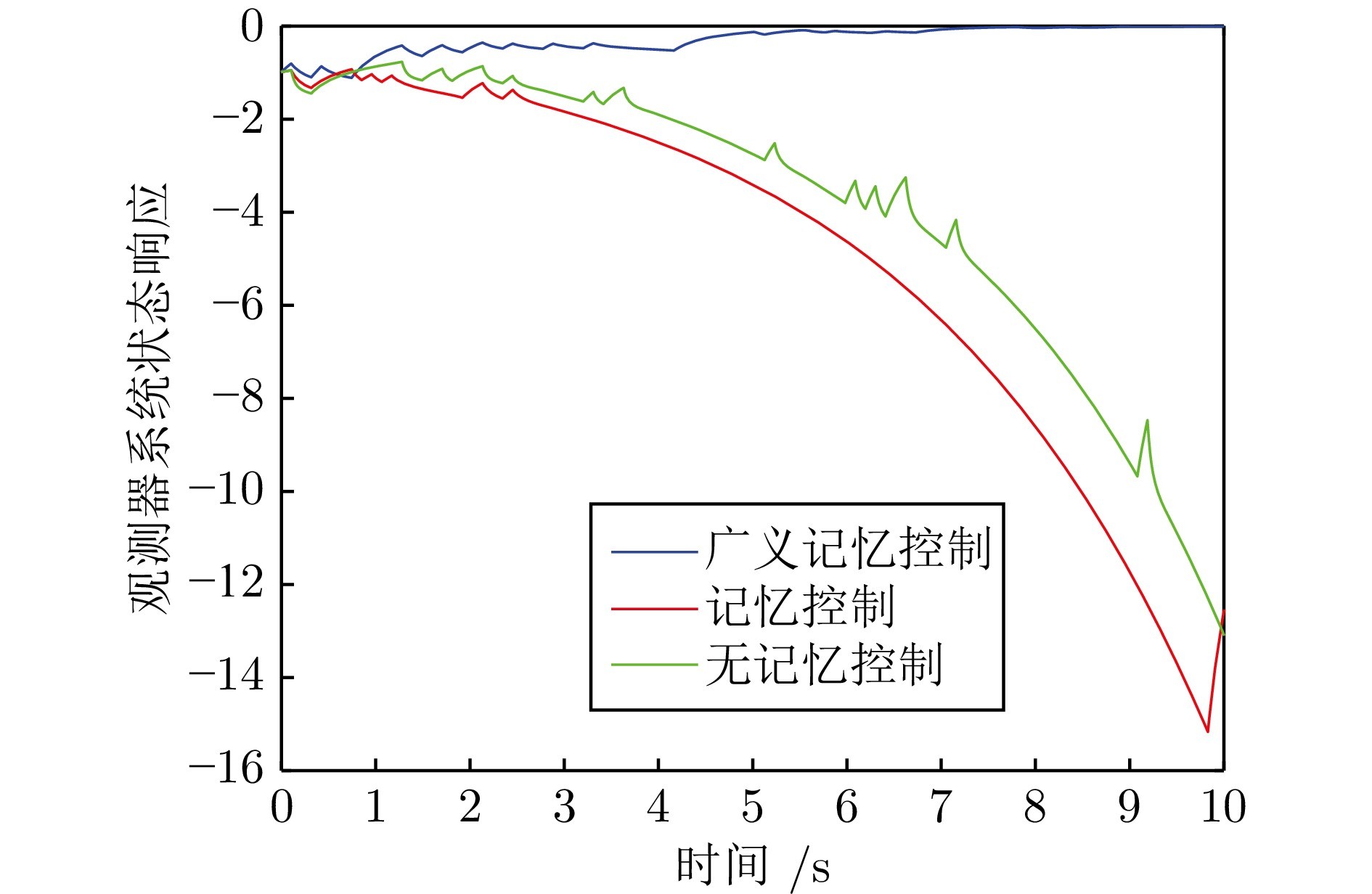
图 5 闭环系统状态轨迹
本文研究基于动态事件触发观测器的具有丢包的时滞马尔科夫跳跃系统滑模控制问题. 首先, 针对时滞马尔科夫跳跃系统, 构造结合丢包补偿的动态事件触发观测器. 在此基础上, 提出一种包含更多时滞信息的积分滑模函数, 并考虑系统不可避免的异步行为, 设计一个基于隐马尔科夫模型的广义记忆异步滑模控制器. 广义记忆异步滑模控制器既包含时变延迟项, 又包含其可用范围, 涵盖了一些以往的控制器作为它的特例, 具有更强的控制性能和普适性. 通过所提出的控制器保证了观测器轨迹在给定滑模面上的有限时间可达性. 其次, 为充分利用时滞信息得到一个低保守的控制器, 设计一组指数型反凸组合不等式来估计二重积分项和导数项. 相比以往引入未知矩阵降低系统保守性的方法, 本文通过预置两个指数型参数, 在降低保守性的同时避免了计算复杂度的引入. 利用线性矩阵不等式对所考虑的闭环系统进行$ H_{\infty} $性能分析. 最后, 通过数值算例和柔性机械臂实例验证了所提控制方案的有效性. 此外, 通过对比实验验证了在相同条件下, 所提出的广义记忆异步滑模控制器相比无记忆滑模控制器和记忆滑模控制器, 具有更低的保守性和更强的控制性能.
作者简介
杨玥
西安建筑科技大学信息与控制工程学院副教授. 2022年获得重庆大学控制理论与工程专业博士学位. 主要研究方向为智能无人系统的安全控制. 本文通信作者. E-mail: yangyue@xauat.edu.cn
黄佳男
西安建筑科技大学信息与控制工程学院硕士研究生. 主要研究方向为滑模控制, 模糊控制, 及其在机器人系统中的应用. E-mail: h_jn123@xauat.edu.cn
马宗方
西安建筑科技大学信息与控制工程学院教授. 2011年获得西北工业大学博士学位. 主要研究方向为信息融合, 计算机视觉和智能建造. E-mail: zongfangma@xauat.edu.cn
苏晓杰
重庆大学自动化学院教授. 2013年获得哈尔滨工业大学控制科学与工程专业博士学位. 主要研究方向为智能控制系统及其在无人系统中的应用. E-mail: suxiaojie@cqu.edu.cn
https://wap.sciencenet.cn/blog-3291369-1500122.html
上一篇:基于功能脑网络和图特征学习的ADHD分类模型
下一篇:基于强化学习的控制方向未知非线性系统的最优输出调节