博文
基于电量的USVs-UAV系统编队与避障分布式模型预测控制
|
引用本文
李志明, 朱亚锟, 李垚森, 袁超, 郭戈. 基于电量的USVs-UAV系统编队与避障分布式模型预测控制. 自动化学报, 2025, 51(8): 1777−1787 doi: 10.16383/j.aas.c250047
Li Zhi-Ming, Zhu Ya-Kun, Li Yao-Sen, Yuan Chao, Guo Ge. Distributed model predictive control for battery level-based formation and obstacle avoidance in USVs-UAV system. Acta Automatica Sinica, 2025, 51(8): 1777−1787 doi: 10.16383/j.aas.c250047
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c250047
关键词
电量,编队控制,跟踪控制,避障,分布式模型预测控制
摘要
研究无人水面舰艇−无人机(USVs-UAV)系统中基于电量状态的编队控制、避障与轨迹跟踪问题, 提出一种分布式模型预测控制方法以实现多无人载具协同. 第一, 基于USV电量设计编队模型, 实时调整编队构型. 第二, 设计空海协同避障机制, 利用UAV空中高度优势构建障碍物监测网络, 实时更新水面障碍物信息至USV群. 第三, 优化控制框架将编队控制、避障与轨迹跟踪问题统一转化为带约束的优化问题, 通过求解最优控制输入实现多无人载具协同.
文章导读
受实际工程应用需求的驱动, 无人载具技术研究近年来备受关注, 特别是多无人载具集群协同控制领域. 该方向通过整合空、海、陆等多域无人平台(如无人机(UAV)、无人艇、无人车), 构建具备环境感知、任务分配与自主决策能力的智能系统[1−6]. 而作为一种先进的控制方法, 分布式模型预测控制(DMPC)具备处理多变量和多目标控制任务的能力, 因此已广泛应用于多无人载具系统中的编队控制[7−9]、避障[10−11]以及轨迹跟踪[12−13]. 作为多无人载具系统的基础控制之一, 多种编队控制算法被提出. 文献[7]基于DMPC方法实现了多无人水面舰艇(USV)和多UAV组成的异构多无人载具系统的编队控制. 同时, 针对模型参数不确定的情况, 文献[8]基于坐标变换、后推法、动态面控制(DSC)技术和神经网络近似, 开发一种无奇点的编队控制器来实现多USV系统的编队控制. 相比文献[8], 文献[9]进一步考虑受未知海洋扰动的多无人载具协同编队问题, 基于扰动观测器和滤波技术设计一种控制律, 实现了多无人载具的固定时间编队控制. 虽然上述文献在多无人载具系统的编队控制方面取得了一定的成果, 但均忽略了无人载具的电量不足问题. 文献[14]提出一种动态编队优化策略来为USVs系统构建节能编队. 另外, 文献[15]提出多USV编队的能耗方程以量化单个USV与多USV系统之间的能量收益关系, 这种办法优化了USVs的节能编队, 实现了多USV系统最小电量能耗. 在实际应用中, 无人载具的电量是有限的, 这一因素对编队的可形成性和稳定性有着极为重要的影响. 与文献[7−9]相比, 本文不事先规定多USV系统中各USV的期望位置, 而是将电量纳入期望位置的选择中来确定最优编队期望位置.
在多无人系统的避障中, 多数控制方法都是针对控制系统整体进行避障, 如文献[10]设计一种基于深度Q网络和速度避障算法来实现系统在复杂环境下的避障. 而为解决系统避开不规则障碍物的问题, 文献[11]基于扩展速度避障算法实现了多机器人系统的避障. 事实上, 在无人系统中, 避障并不需要系统整体进行. 当系统需要避障时, 只需其中一个无人载具执行避障动作, 其余无人载具跟随其轨迹即可. 对于多无人载具系统的轨迹跟踪问题, 近年来的研究成果显著, 涵盖了多种先进的控制方法和技术. 文献[12]针对USV的模型不确定性, 提出一种新型分布式二分轨迹跟踪控制协议来实现USV的轨迹跟踪. 而文献[13]针对通信网络中断的情况设计虚拟轨迹约束, 并且设计一种分布式事件触发自适应模型预测控制(DEAMPC)方法, 来实现UAV与USV组成的多无人载具系统的编队与轨迹跟踪控制. 与文献[10−11]提出的避障方法相比, 本文设计的避障机制融入多无人载具系统的轨迹跟踪控制. 这种避障机制无需系统中每个无人载具都进行避障, 仅仅要求一个领导者载具实施避障行为, 其他载具跟踪领导者轨迹即可.
本文将系统电量纳入编队控制中, 提出一种基于电量的编队模型, 设计一种包含$ N$艘USVs和1架UAV的多无人载具系统, 其UAV利用高度优势来勘测水域中的障碍物, 并将障碍物信息传递给USVs, 从而间接提高USV的避障能力. 与之前已发表的文献相比, 本文的创新点总结如下:
1)设计一种基于USV电量的编队模型. 每艘USV的期望位置由其电量决定, 此方法可使得USV得出最优的期望位置, 避免因USV电量不足导致稳定编队无法形成的问题.
2)设计一种USVs-UAV系统. 该系统移动到目标位置, 并在其周围形成矩形编队. 同时, 作为勘测者的无人机, 对水域中的障碍物进行勘测, 并将障碍物信息传输给USVs, 从而增强了系统的避障能力.
3)设计一种基于分布式模型预测控制的USVs-UAV系统协同控制方法. 通过构建代价函数获得最优输入, 以实现系统的控制目标.
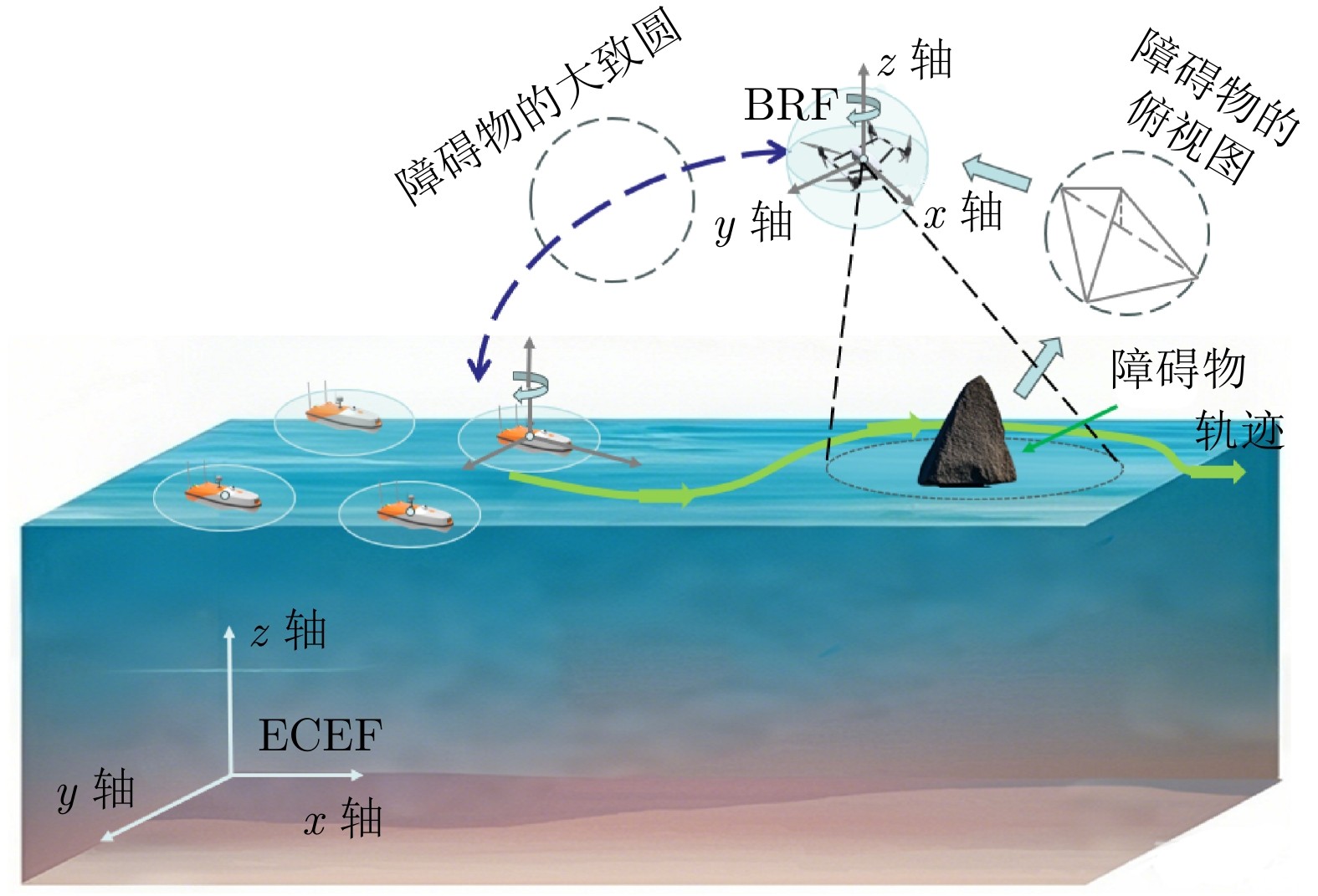
图 1 USVs-UAV系统
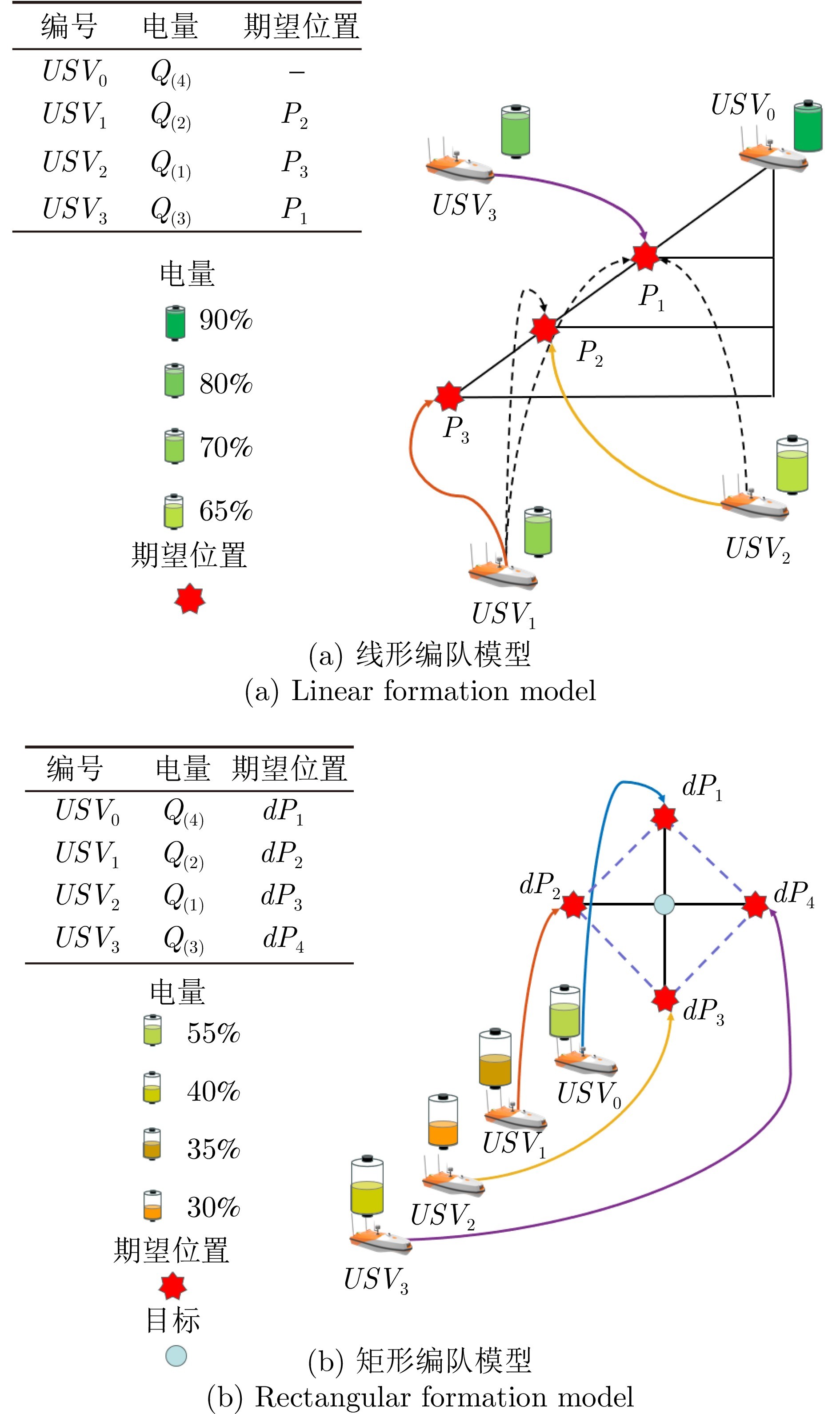
图 2 编队模型
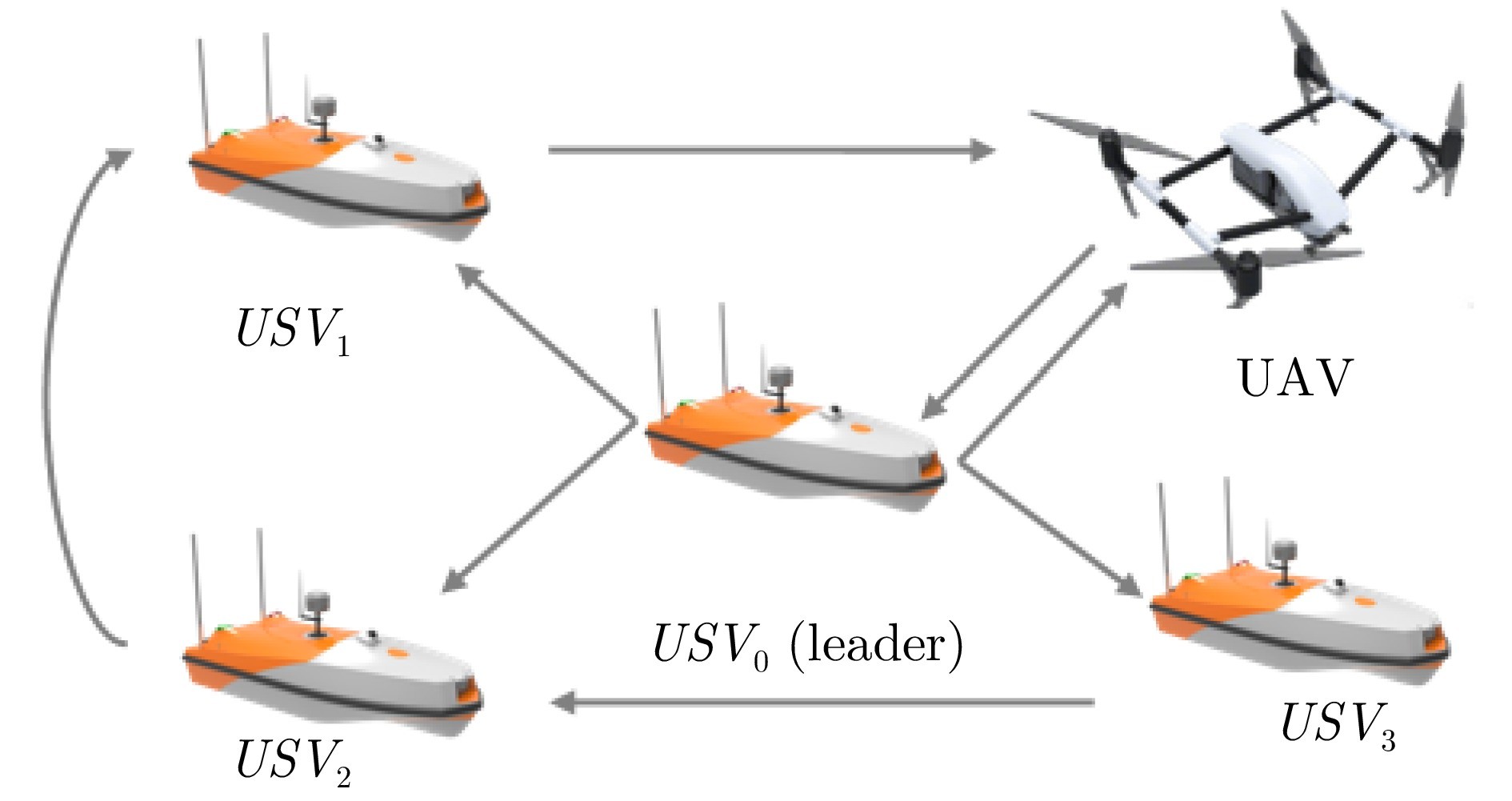
图 3 通讯拓扑$ {\cal{G}}$
本文研究了USVs-UAV协同系统的编队控制、轨迹跟踪与避障问题, 设计分布式模型预测控制方法以实现多智能体协同目标. 针对USV能量约束特性, 提出两种基于电量的编队模型, 并通过对比实验验证了模型的必要性. 通过构建合理的代价函数求解各无人载具的最优控制输入, 实现领导者编队控制与动态避障、跟随者轨迹跟踪与编队控制. 当系统接近目标时, USV群依据电量生成矩形编队. 仿真结果表明, 所设计模型能有效协调能量约束与编队性能的平衡.
作者简介
李志明
东北大学硕士研究生. 2024年获得华北理工大学学士学位. 主要研究方向为多无人载具系统的协同控制. E-mail: 15932568153@163.com
朱亚锟
东北大学副教授. 2013年获得燕山大学博士学位. 主要研究方向为智能交通系统中的分布式协同控制与优化. 本文通信作者. E-mail: fozyking@163.com
李垚森
东北大学硕士研究生. 2024年获得青岛理工大学学士学位. 主要研究方向为智能交通系统的分布式控制与优化. E-mail: flysen2002@163.com
袁超
东北大学硕士研究生. 2024年获得大连大学学士学位. 主要研究方向为分布式自适应编队跟踪控制. E-mail: 15261980166@163.com
郭戈
东北大学教授. 1998年获得东北大学控制理论与控制工程专业博士学位. 主要研究方向为智能交通系统, 共享出行系统和信息物理融合系统. E-mail: geguo@yeah.net
https://wap.sciencenet.cn/blog-3291369-1502894.html
上一篇:基于深度学习的视频插帧研究进展
下一篇:基于扰动响应的自适应集成黑盒对抗攻击算法