博文
城市污水处理过程非均匀采样预测控制
|
引用本文
付世佳, 孙浩源, 刘峥, 韩红桂. 城市污水处理过程非均匀采样预测控制. 自动化学报, 2025, 51(7): 1599−1611 doi: 10.16383/j.aas.c250007
Fu Shi-Jia, Sun Hao-Yuan, Liu Zheng, Han Hong-Gui. Non-uniform sampling predictive control for municipal wastewater treatment process. Acta Automatica Sinica, 2025, 51(7): 1599−1611 doi: 10.16383/j.aas.c250007
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c250007
关键词
数据驱动,非均匀采样数据,预测控制,动态线性化
摘要
城市污水处理过程非均匀采样使数据呈现不连续性及稀疏性, 难以实现稳定控制. 为解决该问题, 提出一种非均匀采样预测控制方法. 首先, 建立一种城市污水处理过程增广式动态线性化模型, 实现非均匀采样城市污水处理关键过程变量的准确预测; 其次, 设计基于控制增益优化策略的预测控制器, 实现非均匀采样城市污水处理关键过程变量的稳定控制; 最后, 分析非均匀采样预测控制方法的稳定性. 将所提控制方法应用于城市污水处理过程基准仿真平台, 实验结果显示该方法能够实现城市污水处理过程的稳定控制.
文章导读
随着城市化进程加速推进, 人口密集现象日益显著, 大量生活污水未经处理直接排入水体, 严重污染河流、湖泊乃至地下水资源, 对人类饮用水安全及生态系统健康构成严峻威胁[1]. 城市污水处理能有效去除污水中的有害物质, 是保障水资源循环利用、维护生态平衡、促进可持续发展的重要途径[2]. 然而, 城市污水处理过程(Wastewater treatment process, WWTP)运行机理复杂, 具有强非线性和运行非平稳等特点, 其关键过程变量的稳定控制面临着极大的挑战.
为实现城市污水处理关键过程变量的稳定控制, 国内外学者提出多种控制方法. 例如, Liu等[3]提出一种级联控制方法, 采用级联模型预测控制−比例积分导数控制器控制出水硝酸盐浓度和缺氧区硝酸盐浓度, 保证城市污水处理过程的出水质量. Tejaswini等[4]考虑污水处理厂综合效率指标设计比例积分控制器, 实现溶解氧浓度的稳定控制, 保证氮的去除效率. 这些控制方法[5−6]虽然为城市污水处理关键过程变量提供了可接受的控制结果, 但其参数调整依赖于系统模型或专家经验知识. 面对实际的城市污水处理过程动态复杂场景时, 上述控制方法的操作性能会急剧下降.
为应对城市污水处理过程实际动态复杂场景, 提高其关键过程变量的控制精度, 国内外研究者提出多种先进控制方法. 例如, 黄超等[7]针对厌氧−缺氧−好氧污水处理工艺提出一种双模糊逻辑控制算法, 建立合理模糊规则库, 设计双模糊逻辑控制器, 获得良好的曝气效果. 为实现城市污水处理过程的多变量控制, 周红标等[8]提出一种基于自适应变论域模糊控制方法, 设计自适应伸缩因子在线调节模糊控制论域, 实现溶解氧浓度和硝态氮浓度的准确控制. 此外, 基于滚动优化和反馈校正的预测控制方法, 在复杂系统控制方面表现出适应性广、建模方便以及抗干扰能力强等诸多优点, 该方法在城市污水处理过程中得到广泛的应用[9]. 例如, Li等[10]提出一种基于模糊C均值聚类算法的预测控制方法, 利用模糊C均值聚类算法划分模糊空间, 引入最小二乘法估计系统参数, 并设计预测控制器, 实现溶解氧浓度的在线控制. Stebel等[11]提出基于边界的预测控制方法, 将过程变量引入预定义的边界中, 重新定义控制目标并设计相应的预测控制器, 实现溶解氧浓度的准确控制. 需要指出的是, 上述方法的实现均需建立系统的状态空间模型, 再利用参数辨识方法获取模型参数. 显然, 辨识的模型参数精度会直接影响控制器的操作性能.
数据驱动的控制方法仅依赖于系统的输入/输出数据, 无需辨识模型参数, 具有实时感知城市污水处理过程系统状态动态变化的能力[12]. 因此, 为提高城市污水处理关键过程变量的控制性能, 国内外学者提出多种数据驱动的预测控制方法. 例如, Han等[13]提出一种数据驱动的预测控制方法, 采用动态线性化方法, 仅依赖过程数据近似系统动力学模型, 并设计预测控制器实现溶解氧浓度和硝态氮浓度的准确控制. Wang等[14]提出一种基于深度学习模型的预测控制方法, 通过分层提取特征学习复杂数据, 设计预测控制器, 保证城市污水处理过程出水水质达标. 上述以及一些其他数据驱动预测控制方法[15−16]在城市污水处理关键过程变量的控制中都取得一定的进展, 但这些方法依赖于系统输入输出等周期采集的数据[17]. 事实上, 由于设备因素(如采样设备本身性能和稳定性)、网络因素(如数据传输中断或延迟)以及环境因素(如气压、气温、风速等), 很难保证能够获取系统的等周期采样数据[18]. 非均匀(非周期)采样造成的数据不连续及稀疏特性, 会使上述方法建模精度下降, 甚至导致控制系统失稳. 因此, 上述方法无法用于非均匀采样城市污水处理关键过程变量的稳定控制问题.
为此, 本文提出一种非均匀采样预测控制(Non-uniform sampling predictive control, NUSPC)方法. 采用线性插值算法预处理非均匀采样数据, 建立城市污水处理过程增广式动态线性化模型, 设计基于控制增益优化策略的预测控制器, 获得最优控制律, 实现城市污水处理关键过程变量的准确控制. 该方法主要有以下三点优势:
1) 为实现非均匀采样城市污水处理关键过程变量的准确预测, 建立一种城市污水处理过程增广式动态线性化模型, 该模型不依赖于系统的动力学, 可提高模型的适用性和准确性.
2) 为实现非均匀采样城市污水处理关键过程变量的稳定控制, 设计基于控制增益优化策略的预测控制器, 简化控制系统的算法实现.
3) 为保证非均匀采样预测控制方法的可靠性, 从理论上分析非均匀采样预测控制方法的稳定性, 给出相应稳定性条件.
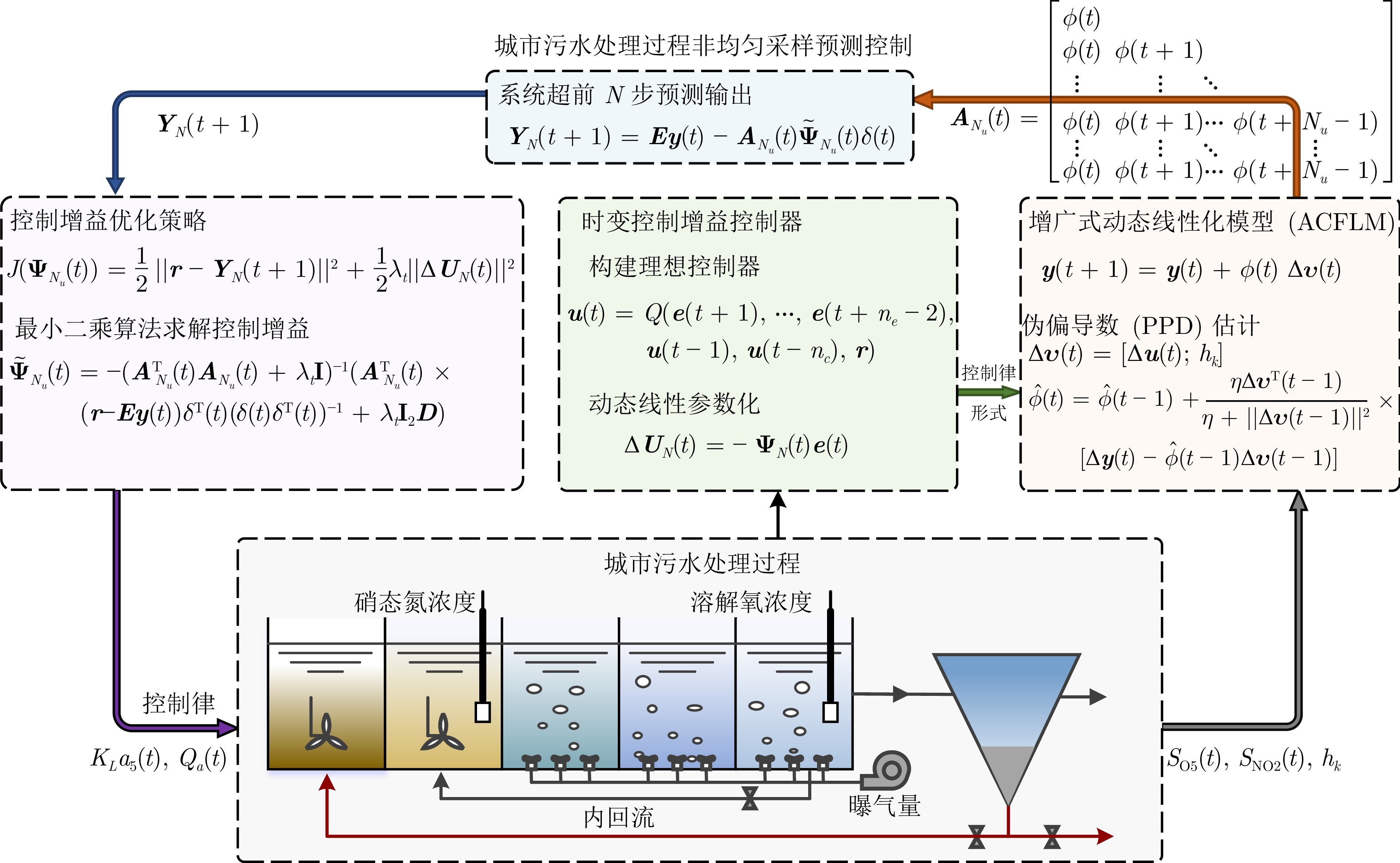
图 1 城市污水处理过程非均匀采样预测控制器结构
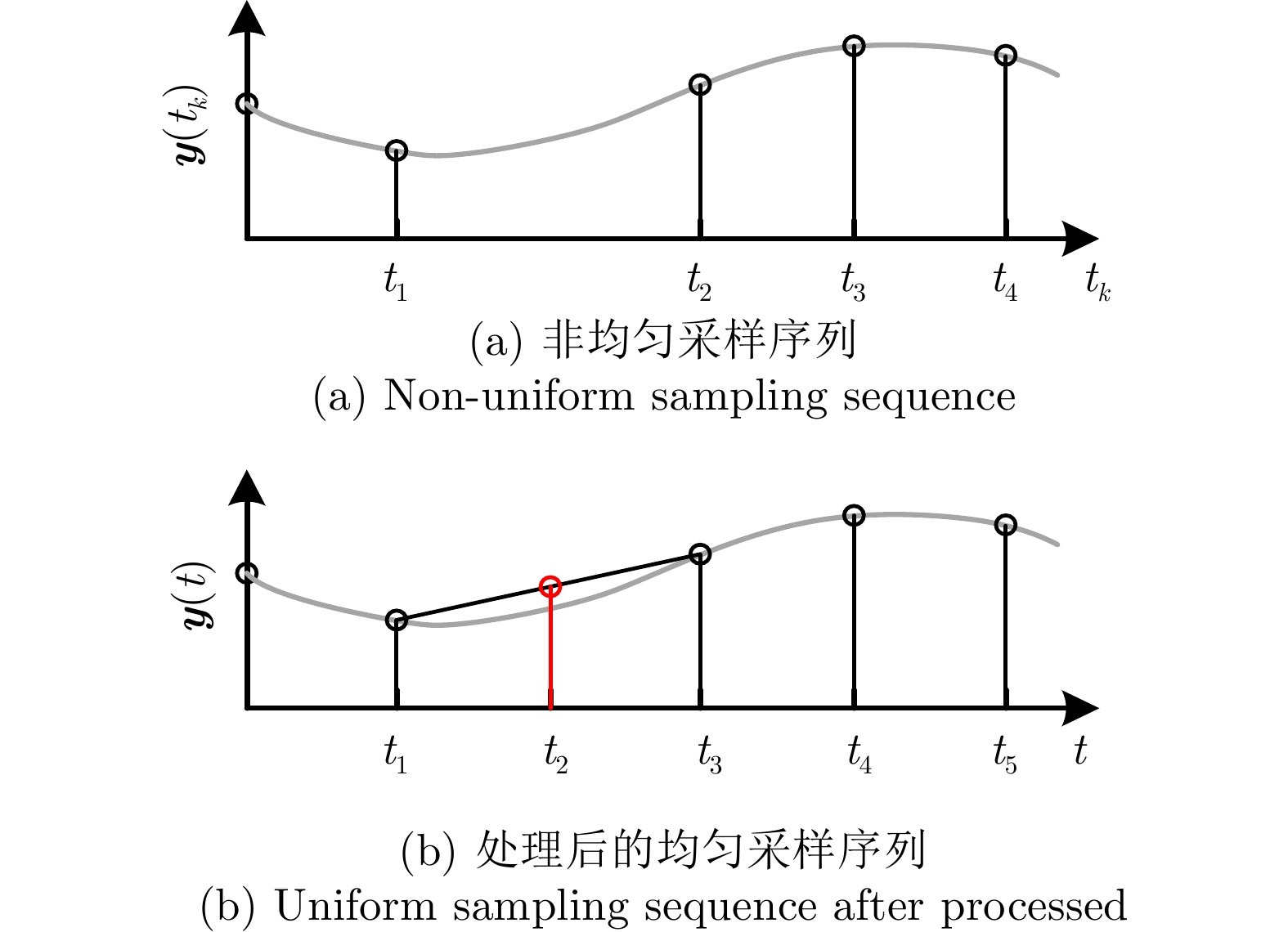
图 2 采样序列处理
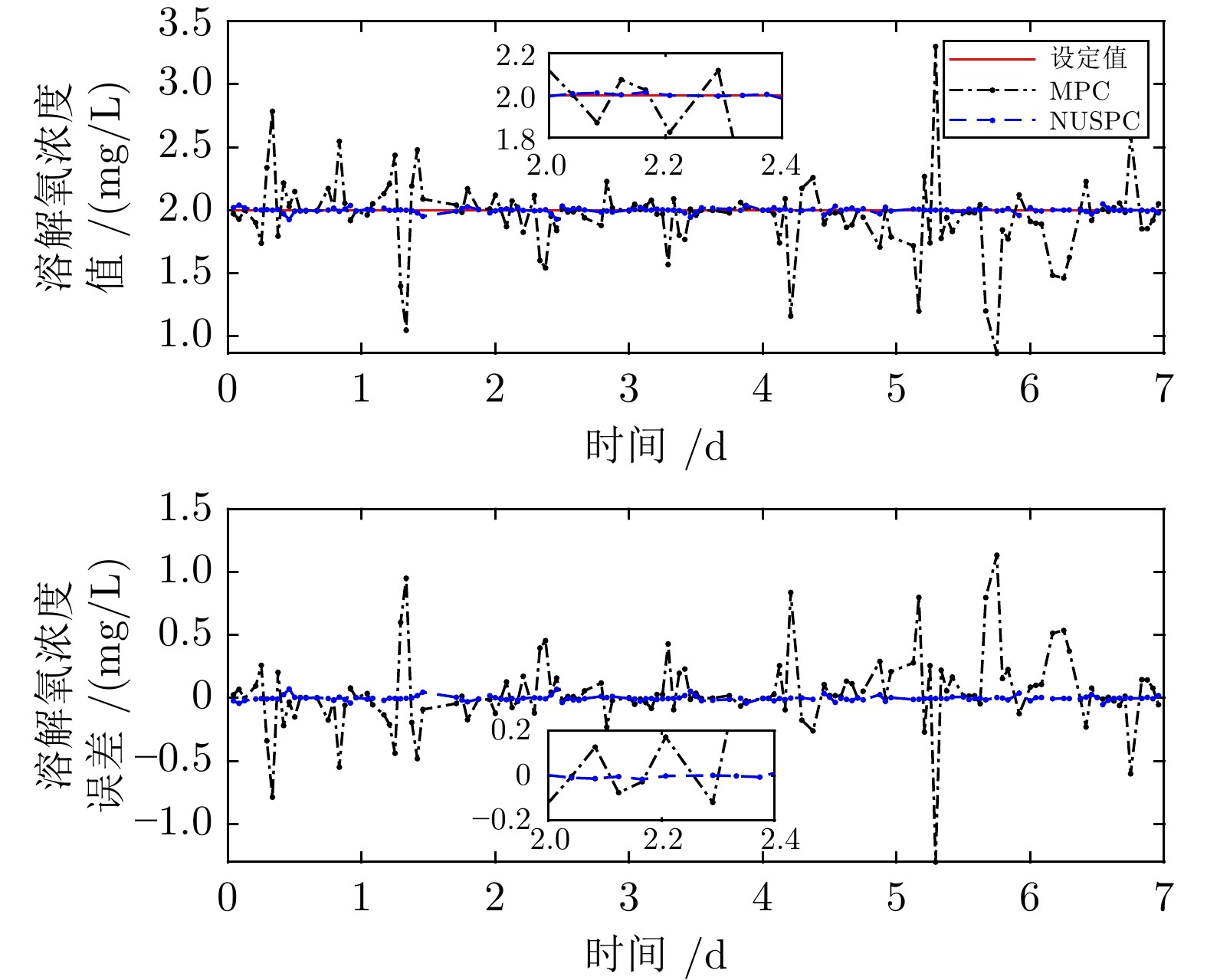
图 3 溶解氧浓度控制效果(晴天天气)
城市污水处理过程非均匀采样使数据呈现不连续性及稀疏性, 导致难以设计控制器实现稳定控制. 为解决该问题, 本文提出一种非均匀采样预测控制方法, 主要工作可以概括为以下三点:
1) 采用线性插值算法处理非均匀采样数据, 建立城市污水处理过程的动态线性化模型. 另外, 考虑非均匀采样间隔对系统输出的影响, 建立了城市污水处理过程增广式动态线性化模型, 该模型不依赖于系统的动力学, 提高了模型的适用性和准确性.
2) 采用线性参数化方法构建时变控制增益控制器, 简化控制算法的实现, 该控制器通过结合系统增广式动态线性化模型, 能够高效地迭代计算系统的预测输出.
3) 设计控制增益优化策略, 获得最优控制律, 并从理论上证明了所提控制方法的稳定性.
然而, 所提方法仅考虑城市污水处理过程设定值恒定的情况, 若设定值时变, 该方法可能难以获得期望的控制性能. 因此, 如何改进控制方法实现时变设定点下具有非均匀采样间隔的城市污水处理过程的稳定控制仍是待解决的问题.
作者简介
付世佳
北京工业大学信息科学技术学院博士研究生. 主要研究方向为城市污水处理过程采样模型预测控制, 非均匀采样预测控制, 随机采样预测控制. E-mail: dongguochen@emails.bjut.edu.cn
孙浩源
北京工业大学信息科学技术学院教授. 主要研究方向为城市污水处理过程智能鲁棒控制, 网络化智能控制. E-mail: sunhaoyuan@bjut.edu.cn
刘峥
北京工业大学信息科学技术学院讲师. 主要研究方向为神经网络, 智能系统, 过程系统的建模和控制. E-mail: liuzheng@bjut.edu.cn
韩红桂
北京工业大学信息科学技术学院教授. 主要研究方向为城市污水处理过程智能优化控制, 神经网络结构设计与优化. 本文通信作者. E-mail: rechardhan@bjut.edu.cn
https://wap.sciencenet.cn/blog-3291369-1498817.html
上一篇:面向不同粗糙程度地面的四足机器人自适应控制方法
下一篇:基于广义最大相关熵准则的几何滤波方法