博文
双端切换拓扑下基于二值通信的多智能体系统容错控制
|
引用本文
王祚, 朱延正, 陈新开, 杨帆, 苏春翌. 双端切换拓扑下基于二值通信的多智能体系统容错控制. 自动化学报, 2025, 51(6): 1347−1358 doi: 10.16383/j.aas.c240722
Wang Zuo, Zhu Yan-Zheng, Chen Xin-Kai, Yang Fan, Su Chun-Yi. Fault-tolerant control for multi-agent systems based on binary-valued communication under dual-terminal switching topologies. Acta Automatica Sinica, 2025, 51(6): 1347−1358 doi: 10.16383/j.aas.c240722
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c240722
关键词
多智能体系统,二值通信,双端切换拓扑,均值一致性,容错控制,迭代学习控制
摘要
针对一类双端切换拓扑下基于二值通信的多智能体系统, 研究其迭代学习容错均值一致性控制问题. 为降低通信负担和提高数据传输的安全性, 假设每个智能体只能从其邻居处接收到二值信息, 建立一类双端切换拓扑结构以调控智能体之间的信息传递, 放宽通信拓扑在时间轴上需要完整生成树的限制. 在双迭代尺度框架下, 通过二值信息的估计过程和迭代学习控制技术的交替使用, 实现对智能体邻居状态的估计, 并完成均值一致性控制任务. 进一步地, 针对系统存在执行器故障的影响, 提出一种迭代学习容错均值一致性控制方案, 利用迭代学习实现对故障参数的迭代估计, 以保证系统在执行器故障影响下的性能. 基于非负的复合能量函数理论, 证明所得到的误差系统是有界的. 最后, 利用数值仿真算例验证了所提方法的可行性与有效性.
文章导读
近几十年来, 多智能体系统因其在诸多复杂工程系统中的突出表现而引起研究人员关注, 在一些工程应用中, 单个控制系统的模型设计难以完成复杂的控制任务, 而多智能体系统可以通过多个智能体的一致性控制来克服这一困难[1−2]. 因此, 多智能体系统的一致性控制问题受到研究人员的广泛重视[3−13]. 一般来说, 一致性控制主要包括无领导者的一致性控制和跟随领导者的一致性控制. 多智能体系统的一致性控制离不开智能体之间的相互通信. 因此, 通常基于图论建立与通信关系相应的拓扑图来描述智能体之间的通信关系. 拓扑图一般分为两种类型: 有向图和无向图. 针对一类只有有向图的多智能体系统, 文献[14]提出一种模型参考自适应一致性控制方案. 文献[15]研究一类含有无向图和时滞的一阶多智能体系统的鲁棒一致性问题. 然而, 上述文献仅考虑具有固定拓扑结构的多智能体系统. 由于智能体之间的信息交互通常是变化的, 所以固定拓扑结构对于某些特定的耦合系统来说是不适宜的. 进一步地, 提出切换拓扑结构来描述具有可变通信关系的多智能体系统[16−18]. 文献[19]中列举了具有固定拓扑和切换拓扑结构的多智能体系统一致性控制方案的区别. 为证明切换拓扑下多智能体系统渐近一致控制策略的可行性, 文献[20]借助拉普拉斯矩阵的特征, 提出一类多重李雅普诺夫函数分析方法. 文献[21]利用平均驻留时间的切换方法调节拓扑结构的变化, 保证了在切换拓扑下多智能体系统一致性控制策略的有效性. 无论是具有固定拓扑结构还是切换拓扑结构的多智能体系统, 为达到预期的控制效果, 都必须确保在一定程度上的有效通信. 然而, 在通信信息不完整的情况下, 多智能体系统是否能够维持其控制任务的完整性和效率, 仍然是一个亟待解决的关键问题. 因此, 在信息不完整的环境下, 为实现某一控制目标, 是否可以考虑利用迭代切换拓扑以补偿每个时间轴上缺失的通信信息, 是一个值得研究的课题.
另一方面, 智能体之间传递信息的准确性对于实现分布式一致性控制至关重要, 它是确保整个系统稳定运行和达到预期控制效果的关键因素之一. 在上述文献中, 一致性控制问题是在仅考虑通信环境不受任何限制的理想假设下进行的. 然而, 这种假设是不贴合实际的, 因为实际的通信环境经常受到噪声影响, 而且由于带宽的限制, 传输的信息通常需要被量化. 为避免出现此类问题, 信息量化得到广泛研究[22−25]. 量化通信技术具有减轻网络链路通信负担的能力. 二值通信技术作为一种量化通信的特例, 通过限制信息传递仅有0和1两个状态, 不仅最小化了通信负载, 而且在数据传输过程中提高了安全性. 文献[26]介绍二值通信的一些基础理论, 研究仅配备二值传感器系统的系统辨识问题. 文献[27]构造一种交替估计和控制的双时间尺度协议, 即智能体在设定的静止时间段内依据二值测量结果对其邻居的状态进行估计, 在静止时间段内智能体的状态保持恒定以实现每个智能体对邻居状态和自身状态的估计. 进一步地, 针对智能体在随机噪声下只能得到其邻居状态的二值观测值的情况, 文献[28]提出一种一致性算法, 首先, 每个智能体通过递归投影算法估计其邻居的状态; 然后, 每个智能体根据预估及时设计控制方案. 然而, 文献[27]和文献[28]所提出的双时间尺度协议对系统的动态性能有严格的限制. 对于多智能体系统的迭代学习均值一致性控制, 文献[29]设计一种新的交替估计和控制的双迭代尺度框架, 将时间轴的信息估计和控制器更新交替通过迭代轴来实现, 去除了对系统动力学沿时间轴变化的严格限制. 以上结果并未针对二值通信过程中存在拓扑结构变化和信息缺失的情况展开研究. 因此, 对于切换拓扑结构下存在信息缺失时, 二值通信技术如何保证多智能体系统之间的信息传递是一个值得研究的课题.
此外, 作为一种不需要精确掌握系统模型的控制方法, 迭代学习控制在很多领域也得到广泛应用[30]. 文献[31]总结关于迭代学习控制的研究进展, 并介绍迭代学习控制的相关理论. 文献[32]研究多智能体系统在一些特殊情况下的迭代学习一致性控制. 文献[33]针对一类未知非线性多智能体系统的一致性跟踪问题, 提出一种分布式无模型自适应迭代学习控制方法. 基于迭代学习方法, 利用迭代轴上的迭代变化拓扑来补偿各时间轴上缺失的通信信息. 另外, 实际工程系统在工作过程中可能出现各种故障, 由于故障可能导致系统性能下降甚至造成系统不稳定, 为提高系统的安全性和可靠性, 容错控制作为一种有效的控制方案受到广泛关注[34−37]. 文献[38]研究一类多智能体系统的容错一致性问题, 提出一种少参数的分布式自适应协议, 补偿系统中的故障效应和不确定性效应, 减少在线更新参数的数量. 针对多智能体系统的自适应容错跟踪控制问题, 文献[39]将反步算法与强化学习算法相结合, 设计一种直接自适应最优控制器. 然而, 以上介绍的容错控制方案都是基于时间控制的, 而关于利用迭代学习技术处理系统故障问题的研究还比较少. 因此, 探讨在拓扑通信信息缺失的情况下, 如何借助迭代学习控制技术处理系统的故障问题是一个值得深入研究的内容.
基于上述研究内容, 本文针对一类在二值通信下存在执行器故障的多智能体系统, 提出一种基于迭代学习的容错均值一致性控制方法. 为放宽通信拓扑对于有向生成树的限制, 构造一类新的双端切换拓扑结构. 基于迭代学习方法, 利用迭代轴上的迭代切换拓扑来补偿各时间轴上缺失的通信信息. 因此, 双端切换拓扑允许时间轴上有一定的信息丢失, 经过多次迭代可以实现期望的控制目标. 利用双迭代尺度框架, 通过在迭代轴上的信息估计和控制器更新交替实现均值一致性控制. 同时, 由于考虑了双端切换拓扑, 所以双迭代尺度框架中的迭代次数选取需要进一步考虑候选拓扑的数量. 本文贡献主要体现在以下三个方面:
1) 在迭代学习框架下, 提出一类多智能体系统的双端切换拓扑结构. 双端切换拓扑结构由切换拓扑和迭代拓扑组成, 两者分别对应于时间轴和迭代轴上的通信关系变换. 与现有的一致性控制方案相比, 建立的双端切换拓扑结构放宽了拓扑候选者的连通性限制, 利用基于迭代轴与时间轴的信息交叉互补, 实现智能体之间信息传递的完整性, 从而保证均值一致性控制任务.
2) 在考虑双端切换拓扑的基础上, 利用二值通信降低智能体网络的通信负担, 还可以在通信过程中提高数据安全性. 进一步地, 通过信息切换的互补来降低在时间轴上智能体之间的通信需求. 利用双端切换拓扑结构和二值通信技术实现对通信信息的进一步减少, 同时增加信息传输的安全性. 在二值通信的处理过程中, 利用双迭代尺度框架将状态估计过程转移到迭代轴上, 完成邻居状态的估计以及避免考虑状态在双时间尺度框架下时间轴上的限制.
3) 对于一类在双端切换拓扑下的多智能体系统, 考虑系统在运行过程中存在执行器故障, 提出一种基于迭代学习控制技术的容错控制方案. 基于迭代信息和二值通信下对邻居状态的估计, 设计一种迭代学习容错控制器, 确保系统的稳定性, 并实现多智能体系统的均值一致性容错控制, 保证即使在执行器部分失效的情况下, 系统控制性能也能够满足期望的控制需求.
本文内容安排如下: 第1节介绍双端切换拓扑理论和系统模型等相关预备知识; 第2节对二值信息进行估计; 第3节提出迭代学习的均值一致控制方法; 第4节给出数值仿真结果来验证所提控制方案的有效性; 第5节进行总结与展望.
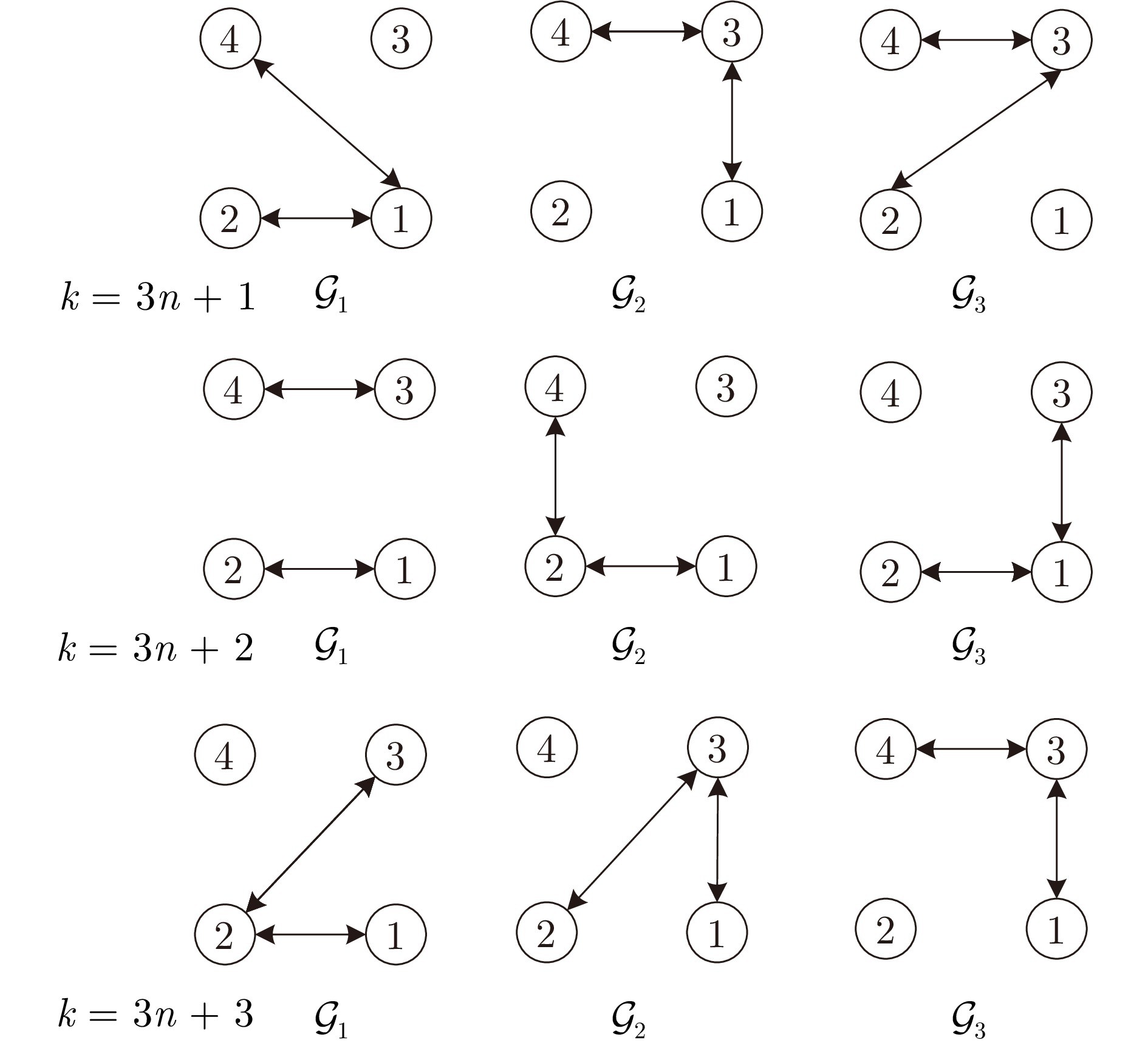
图 1 双端切换拓扑
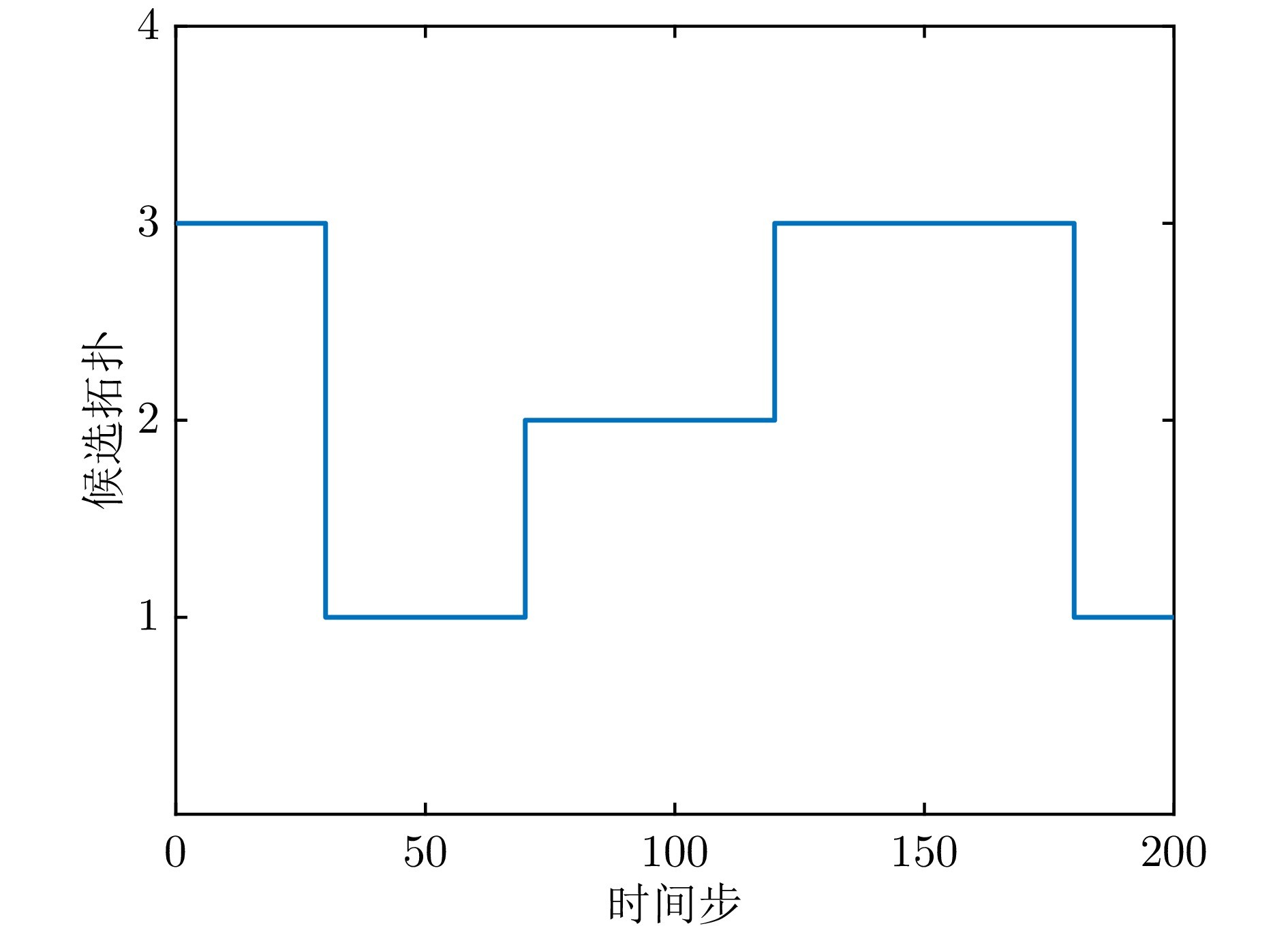
图 2 切换信号$\varrho(t)$
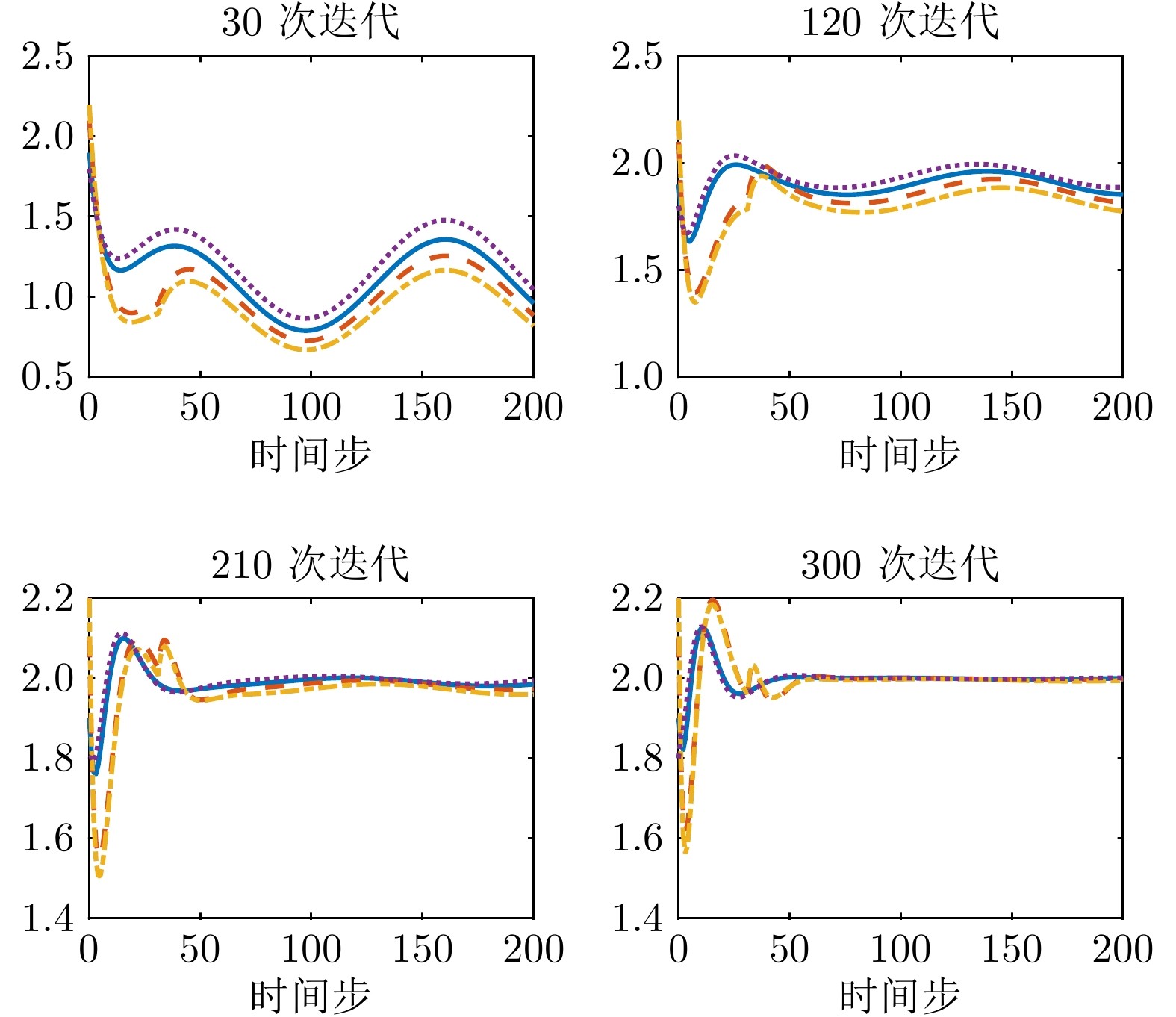
图 3 双端切换拓扑下30、120、210和300次迭代智能体的状态响应
本文针对双端切换拓扑下基于二值通信的多智能体系统, 实现迭代学习容错均值一致性控制. 建立一类双端切换拓扑结构, 放宽对通信拓扑在时间轴上需要完整生成树的限制. 进一步地, 在双端切换拓扑结构下利用二值通信, 有效降低通信负担并提高数据传输的安全性. 同时, 基于双迭代协议框架实现对智能体邻居状态的二值信息接收和辨识, 并利用提出的辨识方法完成对智能体邻居状态的估计, 以达到可以完成多智能体系统均值一致性控制任务的目的. 针对执行器故障这一常见问题, 本文提出一种迭代学习容错均值一致性控制方案. 该方案通过迭代学习技术, 实现对故障参数的估计, 从而确保系统在执行器故障影响下控制任务的需求, 这一点对于提高系统的可靠性和安全性至关重要. 最后, 通过数值仿真算例, 验证所提方法的可行性与有效性. 此外, 本文中所采用的双端切换拓扑结构在迭代轴和时间轴上的切换是基于预先设定的时间进行调整的. 因此, 面对智能体间通信遭受攻击的情况, 探索如何调整智能体间的通信关系, 并构建新的双端切换拓扑结构, 以增强系统的通信安全性和可靠性, 是未来值得深入研究的一个课题.
作者简介
王祚
华侨大学机电及自动化学院博士研究生. 2021年获得渤海大学控制理论与控制工程专业硕士学位. 主要研究方向为多智能体系统一致性控制. E-mail: wangzuo_2018@163.com
朱延正
山东科技大学电气与自动化工程学院教授. 2016年获得哈尔滨工业大学控制科学与工程专业博士学位. 主要研究方向为非确定切换系统控制理论与方法. 本文通信作者. E-mail: yanzhengzhu@sdust.edu.cn
陈新开
芝浦工业大学电子与信息系统系教授. 1999年获得名古屋大学博士学位. 主要研究方向为自适应控制和滑模控制. E-mail: chen@sic.shibaura-it.ac.jp
杨帆
华侨大学机电及自动化学院教授. 2008年获得康考迪亚大学机械工程专业博士学位. 主要研究方向为机电一体化和振动控制. E-mail: xmyf@hotmail.com
苏春翌
康考迪亚大学机械与工业工程系教授. 1990年获得华南理工大学控制工程专业博士学位. 主要研究方向为机电一体化系统及机器人控制. E-mail: cysu@alcor.concordia.ca
https://wap.sciencenet.cn/blog-3291369-1495540.html
上一篇:基于域适应物理信息神经网络的时间序列预测方法
下一篇:基于全过程隐私保护的多智能体系统平均一致性