博文
基于域对抗自适应学习的旋翼无人机姿态稳定方法
|
引用本文
李凤岐, 金佳玉, 杜学峰, 张鑫, 徐凤强, 王德广. 基于域对抗自适应学习的旋翼无人机姿态稳定方法. 自动化学报, 2025, 51(5): 1103−1117 doi: 10.16383/j.aas.c240186
Li Feng-Qi, Jin Jia-Yu, Du Xue-Feng, Zhang Xin, Xu Feng-Qiang, Wang De-Guang. Domain adversarial adaptive learning based attitude stabilization method for rotary wing unmanned aerial vehicles. Acta Automatica Sinica, 2025, 51(5): 1103−1117 doi: 10.16383/j.aas.c240186
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c240186
关键词
旋翼无人机,复杂海风环境,姿态稳定,域对抗学习,风场预测
摘要
针对复杂海风环境下旋翼无人机姿态控制不稳定的问题, 提出姿态稳定方法(SymTAL-POP). 该方法包括离线学习和在线预测两个部分. 在离线学习阶段, 引入对称式时序域对抗自适应学习算法SymTAL. 结合域对抗学习、对称网络和双向时序网络, SymTAL有效解决了海风环境中无人机姿态稳定问题. 利用深度学习优化加速框架和改进的Adam优化器, 提升了SymTAL的学习能力和计算效率. 在线预测阶段, 设计风场预测模型POP, 实现海风环境的实时感知与预测. POP采用变分模态分解技术处理风速信号, 通过特征选择策略预测不同风况下的风速, 增强了无人机的环境适应能力. 测试结果表明, SymTAL在学习效率和控制精度方面均优于其他姿态稳定算法, POP在连续风、间歇风和湍流风的多风况条件下的预测精度优于其他模型. 仿真实验表明SymTAL-POP在轨迹跟踪误差上表现突出, 平均值降低23.5%, 均方根误差减少55.2%.
文章导读
旋翼无人机在海上作业时常面临复杂变化的海风环境. 由于无人机体积小、重量轻, 容易产生机身剧烈摇晃, 导致控制失效[1−4]. 尽管增加机身尺寸和提升配置可以增强抗风性能, 但这会增加载重、降低无人机的灵活性[5−6]. 因此, 在保证无人机轻便灵活的前提下提升抗风能力, 成为当前研究的重要方向. 部分研究集中于开发和优化控制算法来提升无人机的性能[7], 但在海上环境的应用中仍存在显著挑战. 首先, 这些算法难以适应海风的突变特性; 其次, 增强抗风能力通常以增加计算负载和降低机动性为代价[8]. 以上挑战表明, 提高无人机在复杂海上任务中的稳定性和安全性十分重要.
为实现无人机海上稳定飞行, 亟须解决现有算法难以有效响应风力变化且缺乏自适应调节的问题. 传统的气动力建模主要依赖明确的气动模型[9], 在动态环境中存在误差大、迁移能力差的问题. 此外, 这类模型缺乏自适应控制策略. 为此, 文献[10−11]提出基于扰动观测器(Disturbance observer-based, DOB)和自抗扰控制(Active disturbance rejection control, ADRC)算法, 用于补偿系统扰动并改善输入与输出之间的匹配性能. 然而, 这些方法高度依赖于对扰动的精确估计, 误差可能导致控制结果下降. 为提升无人机的抗风能力, 多项研究工作致力于优化风感知、风阻抗调整算法和风场预测策略. Sziroczak等[12]提出轻量化风感知方案, 但其在复杂风场中的学习效果不佳. Xue等[13]采用深度强化学习和域随机化相结合的方法, 但其在多变风场中的适应性有限. Song等[14]通过模型预测控制(Model predictive control, MPC)实时调整正则化参数, 提升无人机的抗风能力. 然而, 这些方法仍未充分解决风场变化的预测问题. 为此, Yan等[15]提出FlowDrone模型, 通过热线传感器和风感知残差控制器进行风场估计, 但其泛化能力有限. Zha等[16]采用门控循环单元(Gated recurrent unit, GRU)和时间卷积网络(Temporal convolutional network, TCN)组合优化风场预测性能, 但其模型复杂且需要精确调参. 综上所述, 现有研究虽在风场感知和抗风控制方面取得进展, 但在应对复杂海风环境时仍存在旋翼无人机的控制算法适应性不足、计算复杂度高和飞行姿态不稳定的问题, 因此, 亟须提升算法的适应性、优化风场预测性能, 并降低计算负担, 以确保无人机在复杂海风环境下稳定飞行.
为此, 本文提出一种具有抗风特性的域对抗自适应姿态稳定方法SymTAL-POP (Symmetric temporal adversarial learning-partitioned online prediction), 旨在提升无人机对复杂海风环境的适应能力, 确保飞行姿态的稳定性. 风场概念图如图1所示. 该方法包含离线的对称式时序域对抗自适应学习算法SymTAL和在线风场预测模型POP. SymTAL利用域对抗学习捕捉气动共享特征和全面信息, 结合对称网络和双向时序网络, 有效减少了网络层的复杂度, 提升了学习效率和算法性能. 为提升计算效率, 引入深度学习加速技术及改进的Adam自适应优化器, 实现精准的飞行姿态控制. 此外, 通过正则化超参数调整优化对抗性框架, 进一步增强了抗风能力. 在线风场预测模型POP通过变分模态分解(Vibration modedecomposition, VMD)技术对风速信号进行分解, 以便准确捕捉风速特征. 模型池根据风速特征进行决策, 选择GRU-TCN或支持向量回归(Support vector regression, SVR)模型来捕捉风速信号, 从而提升了预测真实性. 该方法增强了无人机在面对不同风力条件下的适应性, 实现复杂海风环境下的自适应稳定飞行.

图 1 风场概念图
本文的主要创新点如下:
1)提出一种具有抗风特性的自适应飞行控制方法: 将离线域对抗自适应学习算法SymTAL和在线风场预测模型POP相结合, 解决了海面风力变化导致无人机不稳定的问题;
2)优化离线学习算法: SymTAL在域对抗学习算法中引入对称网络和双向长短期记忆(Bi-directional long short-term memory, BiLSTM)网络, 并通过深度学习加速技术改进Adam优化器, 优化对抗性框架, 提升了算法性能和计算效率;
3)提升在线风场预测能力: POP使用变分模态分解技术分解风速信号, 并根据特性选择适当的预测模型, 大幅度提高了预测的精确度.
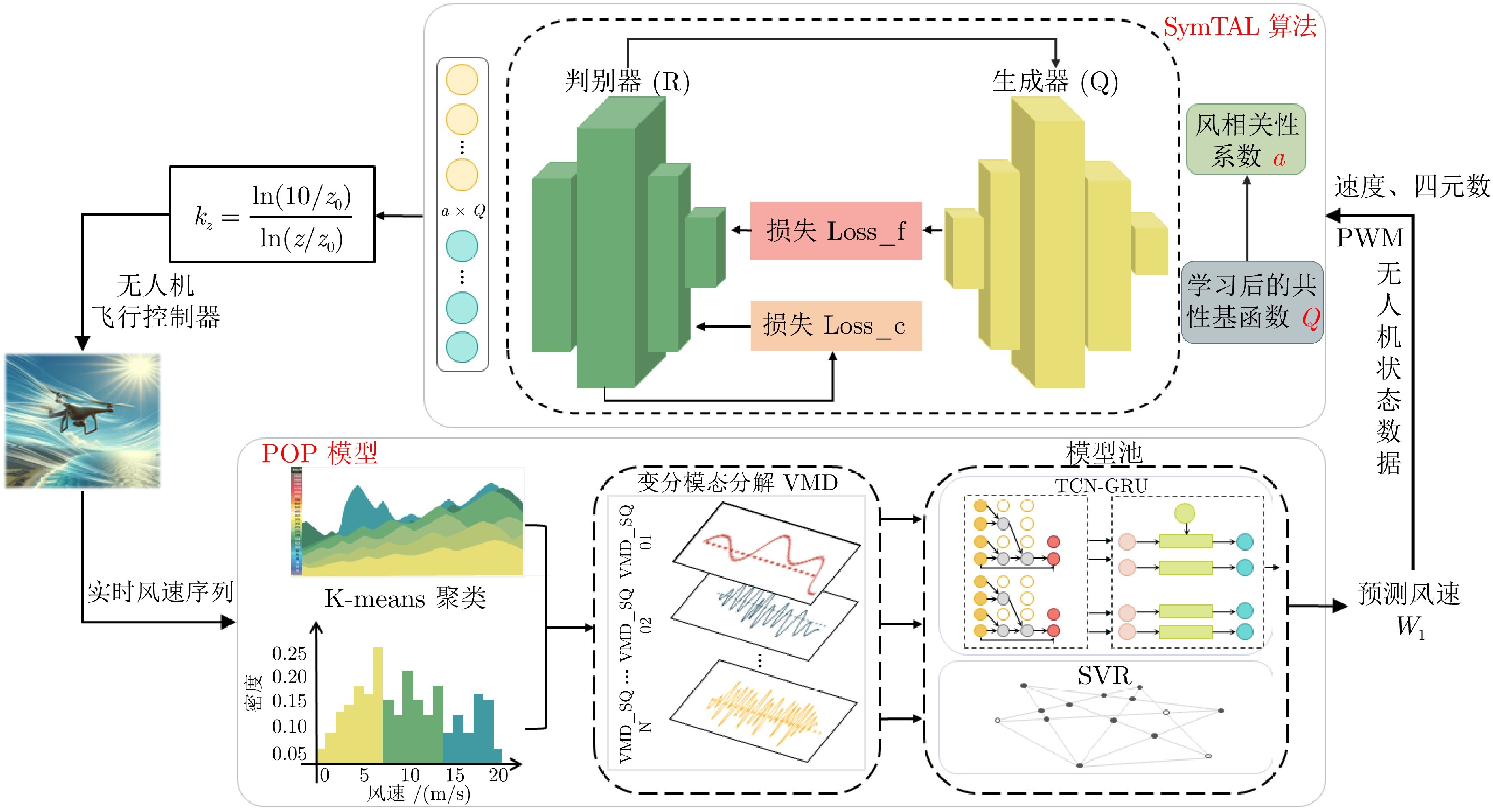
图 2 无人机抗风自适应总体框架图

图 3 对抗损失(Loss_c)
本文介绍了一种具有抗风特性的域对抗自适应飞行控制方法SymTAL-POP, 结合离线对称式时序域对抗学习算法与在线风场预测技术, 提升无人机在海上复杂风况中的稳定性和适应性.
论文的主要贡献包括:
1) 提出无人机飞行控制方法SymTAL-POP, 其中包括离线域对抗自适应学习和在线风场预测两个关键部分, 旨在增强无人机在复杂海风环境中的稳定性和抗风性能;
2) 设计离线SymTAL算法, 结合域对抗学习、对称网络和双向时序网络, 以提取气动共享特征并提升模型的学习能力;
3) 设计在线风场预测模型POP, 使用变分模态分解技术处理风场速度信号, 并根据风信号特性选择模型池中的TCN-GRU或SVR进行风速预测;
4) 通过实验验证, SymTAL-POP算法较其他算法在闭环轨迹跟踪误差性能上有更好的表现.
未来将继续优化该方法, 重点研究变风速和变风向条件下如何实现旋翼无人机的姿态稳定控制, 并将该方法应用到实际无人机系统中.
作者简介
李凤岐
大连交通大学软件学院教授. 主要研究方向为区块链, 工业物联网和智能信息系统. 本文通信作者. E-mail: Fengqi-Li@outlook.com
金佳玉
大连交通大学软件学院硕士研究生. 主要研究方向为无人机智能算法. E-mail: 15142212689@163.com
杜学峰
大连交通大学机械工程学院博士研究生. 主要研究方向为无人机智能群集, 分布式协同控制. E-mail: xuefeng.du@outlook.com
张鑫
大连交通大学软件学院硕士研究生. 主要研究方向为无人机智能算法. E-mail: zx8292@outlook.com
徐凤强
大连交通大学软件学院讲师. 主要研究方向为区块链和计算机视觉. E-mail: xfq@djtu.edu.cn
王德广
大连交通大学软件学院副教授. 主要研究方向为信息安全, 机器学习. E-mail: wdg@djtu.edu.cn
https://wap.sciencenet.cn/blog-3291369-1491786.html
上一篇:基于磁链在线辨识的异步电机超螺旋滑模控制
下一篇:基于质量关联虚拟变量的质量相关变量划分及故障检测