博文
持续扰动下多耦合非线性系统分布式经济模型预测控制
|
引用本文
王定超, 何德峰, 谢永芳. 持续扰动下多耦合非线性系统分布式经济模型预测控制. 自动化学报, 2025, 51(3): 692−704 doi: 10.16383/j.aas.c240295
Wang Ding-Chao, He De-Feng, Xie Yong-Fang. Distributed EMPC of multi-coupled nonlinear systems with persistent disturbances. Acta Automatica Sinica, 2025, 51(3): 692−704 doi: 10.16383/j.aas.c240295
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c240295
关键词
模型预测控制,分布式控制,非线性系统,经济优化,耦合系统
摘要
针对持续扰动下的分布式状态耦合非线性系统, 提出一种新的多耦合分布式经济模型预测控制(Economic model predictive control, EMPC)策略. 由于耦合非线性系统的经济性能函数的非凸性和非正定性, 首先引入关于经济最优平衡点的正定辅助函数和相应的辅助优化问题. 接着, 利用辅助函数的最优值函数构造原始分布式EMPC的一类隐式收缩约束. 然后, 建立状态耦合分布式EMPC的递推可行性和闭环系统关于最优经济平衡点的输入到状态稳定性(Input-to-state stability, ISS). 最后, 以耦合的四个连续搅拌釜反应器(Continuous stirred tank reactors, CSTRs)为例, 验证本文所提策略的有效性.
文章导读
近年来, 分布式状态耦合非线性系统在工业界和学术界引起了广泛关注[1−12]. 这类系统是指一类由相互作用的动力子系统通过交换物质、能源或信息组成的大型耦合系统[6]. 由于子系统的演化会受到耦合子系统的影响, 一个关键挑战是如何处理和协调子系统之间的动力学、约束和目标中的多种耦合, 以实现整个耦合系统的协调优化控制. 分布式模型预测控制(Distributed model predictive control, DMPC)是解决这一问题的主要控制方法之一, 因为它能够有效处理具有约束、多变量、非线性以及子系统状态耦合等因素的优化控制问题.
根据优化控制问题中的耦合关系, DMPC研究主要可分为状态耦合[11−12]、性能指标耦合[13−14] 和约束耦合[15−16]. 对于状态耦合的分布式系统, 文献[11]提出一种基于Tube的DMPC方法, 通过采用稳定反馈控制律来抑制耦合和外部扰动导致的预测状态和实际状态之间的误差, 从而降低了保守性. 文献[12]研究基于压缩理论的DMPC方案, 利用压缩理论估计状态预测误差, 与文献[11]相比, 子系统之间存在信息交互, 从而提升了控制性能并允许更强的耦合度. 针对性能指标耦合的分布式系统, 文献[13]提出一种协作DMPC策略, 其中子控制器的优化目标包括局部跟踪项以及子系统与邻居系统状态之间的偏差项, 通过在优化问题中添加一致性约束, 实现了系统的稳定性. 文献[14]针对单积分和双积分多智能体系统提出一种 DMPC 算法, 该算法同时优化一致性状态和控制输入, 与固定端点的 DMPC 研究[13] 相比, 该方法具有更大的优化空间. 对于约束耦合的分布式系统, 文献[15]提出一种新的通用框架用于离散非线性系统的 DMPC, 该框架解决了在仅允许邻居间通信的情况下, 如何确保系统递推可行性和收敛至合作目标的问题. 文献[16]将文献[15]的结果拓展到多智能体编队系统, 通过使用兼容性、避障和避碰约束, 从而保证了优化问题的迭代可行性和智能体编队系统的一致性. 尽管各种耦合方式的 DMPC 研究已经取得了一定理论成果, 但同时考虑上述三种耦合的非线性系统 DMPC 研究尚未得到广泛关注.
另一方面, 在实际应用中还需要考虑经济因素, 如利润最大化或最小化用电量等[3, 17−22]. 因此, 设计的控制器必须在满足各种约束条件的同时, 实现最佳的经济性能和系统的稳定性(系统的经济性目标与稳定性目标具有一定的冲突性[23]). 针对这一挑战, 部分学者研究了分布式经济模型预测控制(Economic model predictive control, EMPC), 并取得相应的成果[24−27]. 由于这类 DMPC 的性能函数通常与过程的经济(环保)性能相关, 故统称为分布式 EMPC. 然而, 这里的“经济”并不特指某个经济性能, 而泛指一类非正定或非凸的任意性能函数[28]. 这种分布式 EMPC 的一个重要优点是将过程实时控制与经济性能优化结合在一个最优控制框架内设计, 并采用滚动时域方式实现系统的闭环状态反馈控制[29].
现有关于分布式状态耦合系统的 EMPC 稳定性研究主要分为以下两类: 基于耗散性的分布式 EMPC[27, 30] 和基于 Lyapunov 函数的分布式 EMPC[31]. 文献[30]针对受扰的状态耦合分布式线性系统, 提出一种新的分布式 EMPC 算法. 通过引入耗散性假设和附加惩罚函数将经济性能函数转化为正定性能函数, 并结合终端约束, 得到算法的递推可行性和稳定性结论. 由于系统受到扰动和状态耦合的影响, 状态一旦进入终端集合, 下一时刻的状态需要引导至更小的终端集合[27, 30]. 相应地, 文献[32]指出终端集合越小越会对性能函数造成不利影响. 为避免使用终端约束和耗散性条件, 文献[31]通过引入一致性约束, 利用切换控制思想和交替方向乘子法(Alternating direction method of multipliers, ADMM), 提出一种基于 Lyapunov 函数的分布式 EMPC 策略. 该策略在保持闭环系统稳定性的同时, 优化整体性能并提高了系统在扰动下的鲁棒性和并行求解效率. 然而, 该策略需要在线求解三个最优控制问题, 增加了分布式 EMPC 运算的复杂性. 现有研究表明, 约束非线性系统通常不满足耗散性条件[33]. 因此, 针对分布式状态耦合非线性系统, 如何避免上述方法的不足, 并在优化性能的同时确保闭环系统的稳定性, 是耦合分布式 EMPC 研究的一个关键问题.
本文针对具有持续有界扰动的分布式状态耦合非线性系统, 提出一种具有递推可行性和稳定性保证的分布式 EMPC 策略. 首先, 计算每个子系统经济性能指标的最优平衡点, 并定义该平衡点的跟踪型目标函数. 然后, 利用该目标函数的最优值函数构造原始分布式 EMPC 优化问题的收缩约束, 以确保每个子系统的 EMPC 递推可行性和闭环系统关于最优经济平衡点相对于耦合状态和扰动的输入到状态稳定性(Input-to-state stability, ISS). 最后, 通过四个受扰的状态耦合非线性连续搅拌釜反应器(Continuous stirred tank reactors, CSTRs)的仿真实例, 验证了本文提出策略的有效性. 与现有研究相比, 本文的主要创新点如下: 1)针对分布式状态耦合非线性系统, 提出一种能够处理经济目标的同时确保闭环系统稳定性的分布式 EMPC 策略; 2)在控制问题中, 能够同时处理状态耦合、约束耦合和性能指标耦合; 3)利用收缩约束和不变集理论, 证明了算法的递推可行性与 ISS 结论, 此结论无需满足耗散性假设条件, 从而扩大了分布式 EMPC 的适用范围.
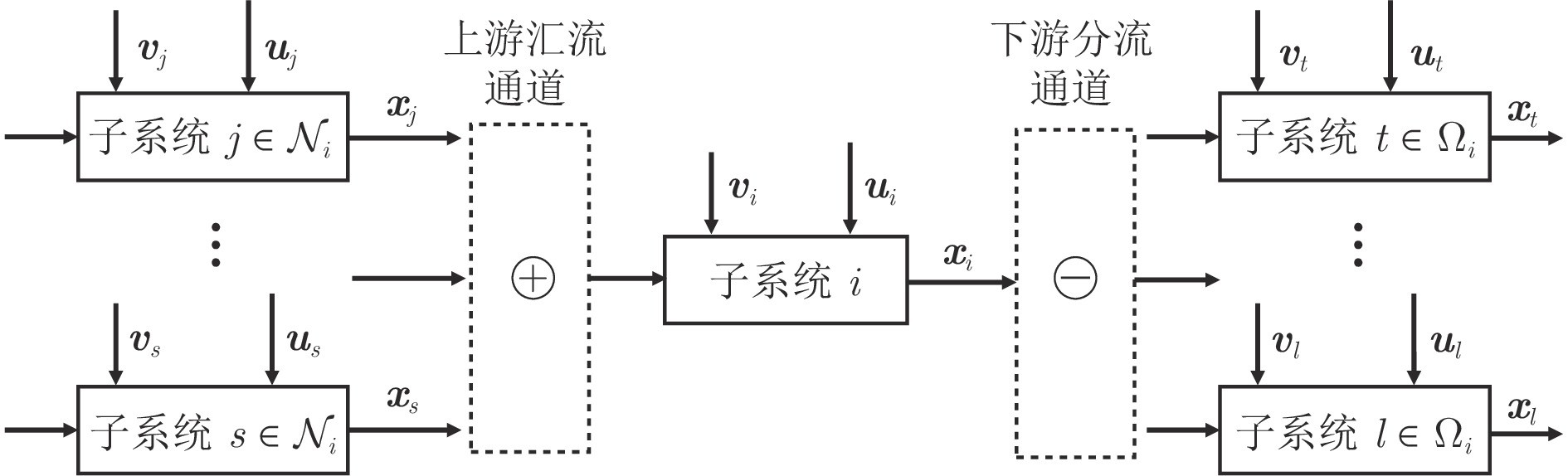
图 1 子系统i的上游和下游邻居集合示意图
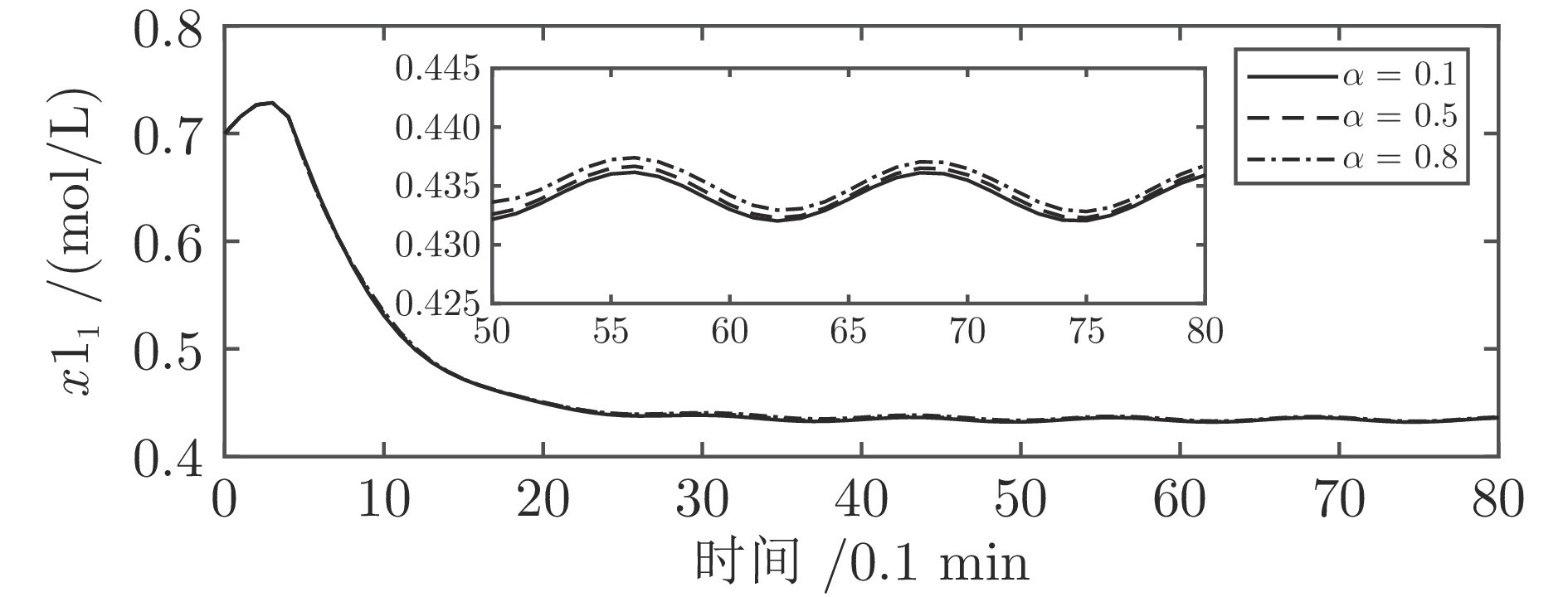
图 2 子系统1的状态x1轨迹
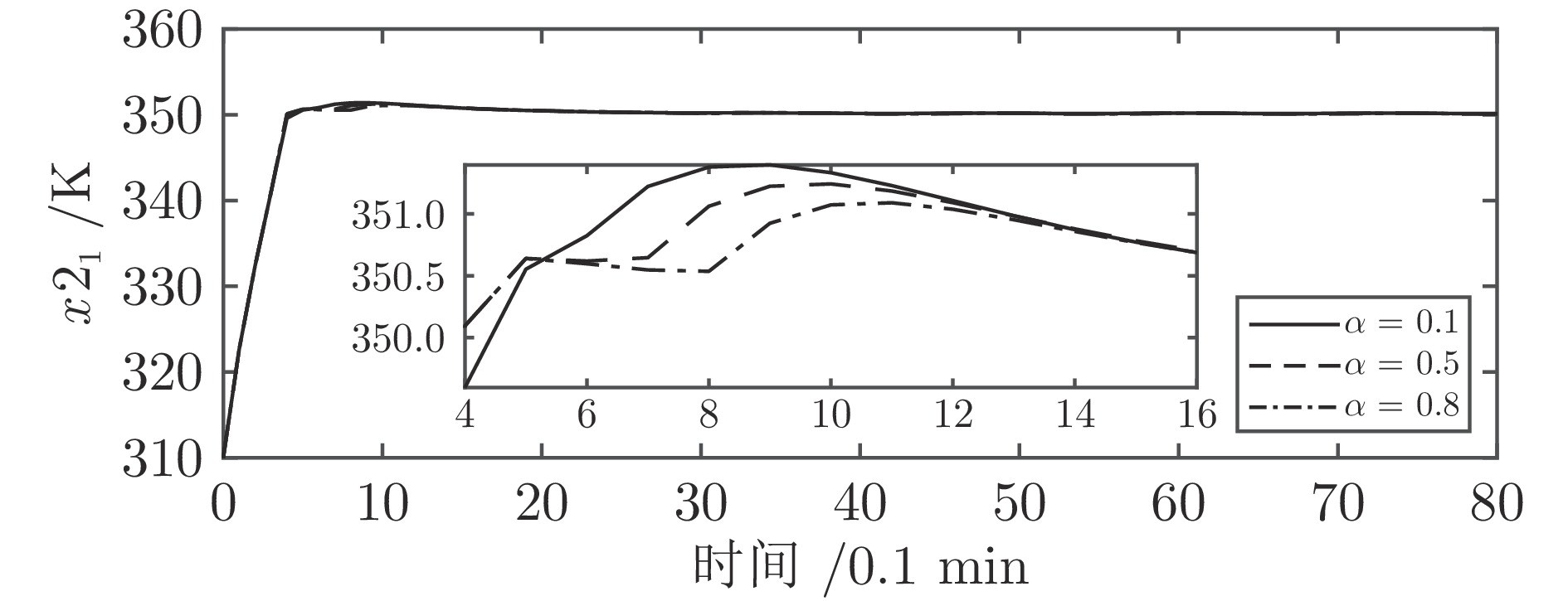
图 3 子系统1的状态x2轨迹
针对受扰的分布式状态耦合非线性系统, 提出一种新的具有稳定性保证的多耦合分布式 EMPC 策略. 首先, 引入辅助优化问题, 并利用其最优值函数构造原始分布式 EMPC 优化问题的一类稳定性约束, 以确保优化问题在经济性和稳定性控制目标下的递推可行性. 然后, 提出两种计算终端域上界的方法, 并建立闭环系统在最优经济平衡点相对于持续扰动的输入到状态稳定性结论. 最后, 通过四个相互耦合的受扰非线性 CSTRs 的仿真实验结果, 验证了所提策略的有效性.
作者简介
王定超
浙江工业大学信息工程学院博士研究生. 2019 年获得浙江师范大学硕士学位. 主要研究方向为非线性系统分布式经济模型预测控制. E-mail: 1112103015@zjut.edu.cn
何德峰
浙江工业大学信息工程学院教授. 2008 年获得中国科学技术大学博士学位. 主要研究方向为智能预测与最优控制和网络系统优化控制. 本文通信作者. E-mail: hdfzj@zjut.edu.cn
谢永芳
中南大学自动化学院教授. 1999 年获得中南大学博士学位. 主要研究方向为分散控制与鲁棒控制, 过程控制, 工业大数据和知识自动化. E-mail: yfxie@csu.edu.cn
https://wap.sciencenet.cn/blog-3291369-1484476.html
上一篇:基于分布式自适应内模的多智能体系统协同最优输出调节
下一篇:IEEE Fellow、IFAC Fellow、香港中文大学(深圳)丘立教授团队成果