博文
模型参数不确定下多无人艇系统固定时间二分编队跟踪控制
|
引用本文
温广辉, 余星火, 黄廷文, 周艳. 模型参数不确定下多无人艇系统固定时间二分编队跟踪控制. 自动化学报, 2025, 51(3): 669−677 doi: 10.16383/j.aas.c240473
Wen Guang-Hui, Yu Xing-Huo, Huang Ting-Wen, Zhou Yan. Fixed-time bipartite formation tracking control for multi-USV systems with uncertain model parameters. Acta Automatica Sinica, 2025, 51(3): 669−677 doi: 10.16383/j.aas.c240473
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c240473
关键词
无人艇,二分编队跟踪,固定时间控制,复合学习
摘要
针对模型参数不确定下多无人艇(Multiple unmanned surface vehicle, Multi-USV)系统的固定时间二分编队跟踪控制问题, 通过将命令滤波与复合学习技术融合到反推控制方法中, 提出一种新型分布式固定时间二分编队跟踪控制协议. 首先, 将命令滤波引入到反推控制中, 进而分别设计虚拟控制协议与真实控制协议. 在此基础上, 为估计未知参数设计了参数复合学习律, 利用在线记录的数据和即时数据来产生预测误差, 并利用跟踪误差和预测误差来更新参数估计. 结果表明, 在严格弱于持续激励(Persistent excitation, PE)条件的区间激励(Interval excitation, IE)条件下, 本文提出的控制方案不仅能够保证编队误差的固定时间收敛性, 也能够保证参数估计误差的固定时间收敛性, 同时解决了多无人艇系统的固定时间二分编队跟踪控制问题. 最后, 通过仿真实验验证了本文提出的控制协议的有效性.
文章导读
水面无人艇是一种无需人工操作的自主水面舰艇, 具有自主性强、成本低、灵活性高等优势. 它可以在危险或人类难以进入的水域执行任务, 广泛应用于民用领域. 例如, 在环境监测、渔业管理、海上搜救、物流运输、通信中继等方面发挥重要作用[1-6]. 然而, 由于单个无人艇的执行能力有限, 往往难以胜任复杂水域任务. 在此背景下, 多无人艇(Multiple unmanned surface vehicle, Multi-USV)协同作业正逐渐成为未来的发展趋势. 在协同作业中, 多艘无人艇通过协同工作, 共同完成复杂水域任务, 如大范围的海洋协同监测、搜索与救援、水下地形协同测绘和水下目标协同探测等. 值得注意的是, 在某些实际应用场景中, 通过引入无人艇之间的竞争交互机制, 可以有效提升多无人艇协同作业的能力[7-8]. 在这种情形下, 底层信息交互拓扑图往往被建模为符号图. 特别地, 二分编队跟踪控制是符号图下多无人艇系统编队控制领域的基础研究课题之一, 旨在设计一组分布式控制协议, 使得多无人艇系统能够以预设的二分编队构型跟踪参考轨迹[8].
在多无人艇系统编队控制领域, 基于反推控制方法的研究成果丰硕[5, 9-12]. 反推控制是一种基于Lyapunov 理论的递归控制方案设计方法, 自20世纪90年代起便受到系统与控制领域学者们的广泛关注[13-15]. 该方法通过将高阶非线性系统拆分为多个较为简单的低阶系统, 并引入虚拟控制器和参数自适应更新律, 以确保闭环系统的稳定性, 从而逐步推导出实际控制器[14]. 然而, 反推控制方法在控制器设计过程中通常需要使用参考轨迹的高阶导数, 并对系统动力学模型的要求较高. 为了克服这些挑战, 文献[16] 引入命令滤波技术, 避免对虚拟控制器求导, 显著降低了计算负担, 简化了控制律的设计和形式, 从而使得该方法能够适用于更广泛的非线性系统. 然而, 基于命令滤波反推方法的多无人艇系统二分编队跟踪控制的研究目前见诸文献的结果还相对较少.
如文献[17-18] 所述, 无人艇在执行实际任务时, 往往会受到风、浪、水流等环境因素的干扰, 这些因素可能导致无人艇的运行不稳定甚至引发事故. 为了增强控制系统的稳定性和鲁棒性, 考虑模型不确定性变得尤为重要. 在处理具有模型不确定性的非线性系统控制问题时, 确保参数收敛性是一个核心环节, 因为它能够提升闭环系统的整体稳定性和鲁棒性. 传统基于梯度下降法的参数自适应律设计方法, 存在参数漂移的潜在威胁. 在此基础上, 添加阻尼项可以有效抑制其影响, 但是在这种参数自适应律设计方法下人们往往难以证明闭环系统的渐近稳定性. 此外, 在传统的自适应控制中, 必须满足一个严格的持续激励 (Persistent excitation, PE) 条件, 以保证参数的收敛性. 然而, 在实际场景下, PE条件通常难以验证. 为了放松PE条件, 在文献[19]和文献[20]中分别提出了并行学习和复合学习技术, 在较弱的区间激励(Interval excitation, IE) 条件下, 确保了参数的收敛性. 此外, 与并行学习方法相比, 由于复合学习自适应律的设计不依赖于系统状态的导数, 在实际应用中往往更具有优势. 另一方面, 无人艇在执行任务时通常要求快速的控制响应. 引入有限时间或固定时间控制技术[21-22] 可以使受控系统在有限时间内达成目标. 此外, 有限时间及固定时间控制技术不仅可以保证跟踪误差的快速收敛, 而且对不确定性具有良好的鲁棒性.
基于以上讨论, 本文针对模型参数不确定下多无人艇系统的固定时间二分编队跟踪控制问题, 提出一组融合命令滤波、复合学习及反推控制技术的分布式控制协议. 本文的贡献可以概括为以下两个方面: 在反推控制方法中引入命令滤波, 有效地避免了对虚拟控制器求导, 极大地降低了计算负担, 且简化了分布式控制协议的形式; 在反推控制方法中引入复合学习, 使得提出的控制协议在不满足PE条件的情况下, 不仅能够确保编队误差的固定时间收敛性, 也能够确保参数估计误差的固定时间收敛性.
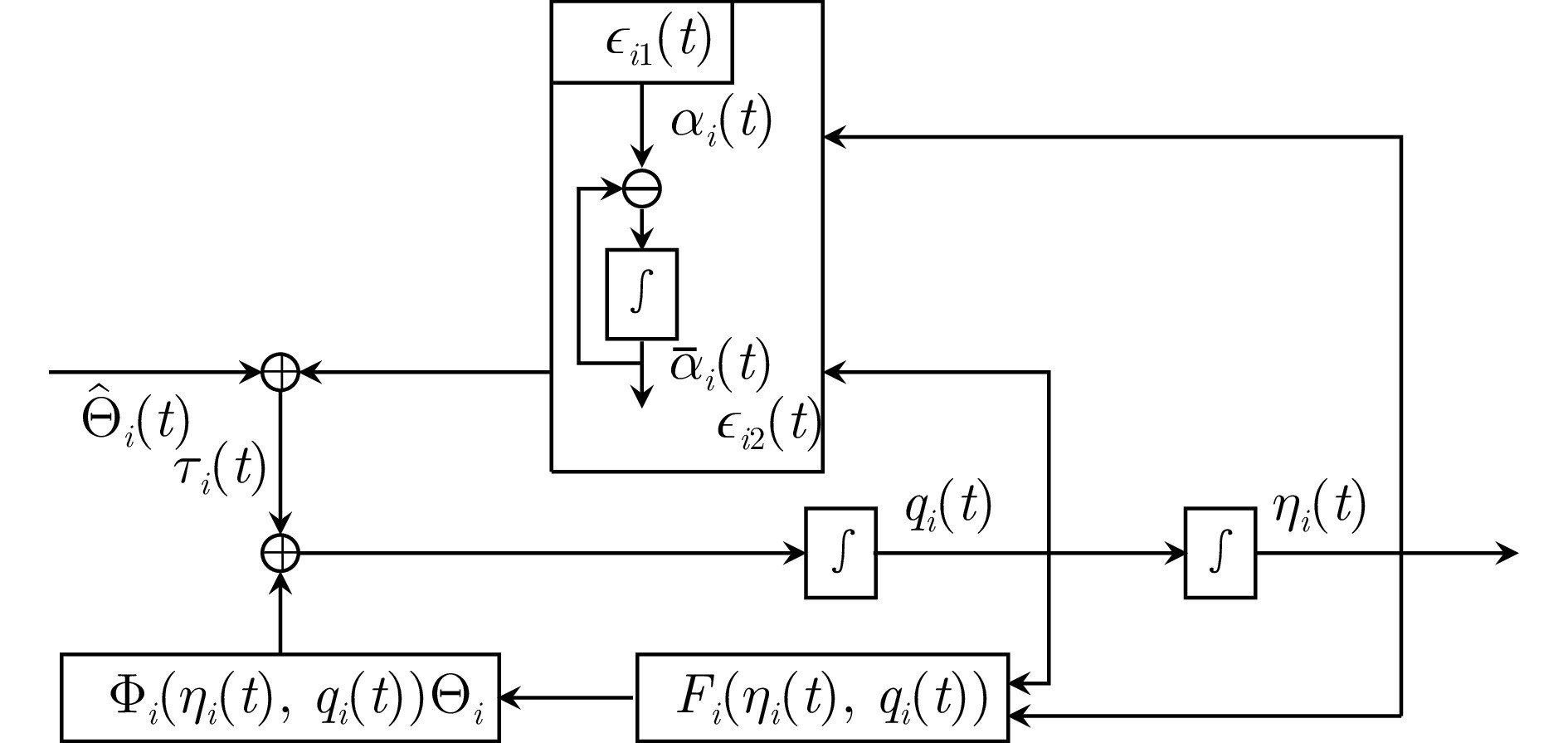
图 1 控制程序和控制信号框图
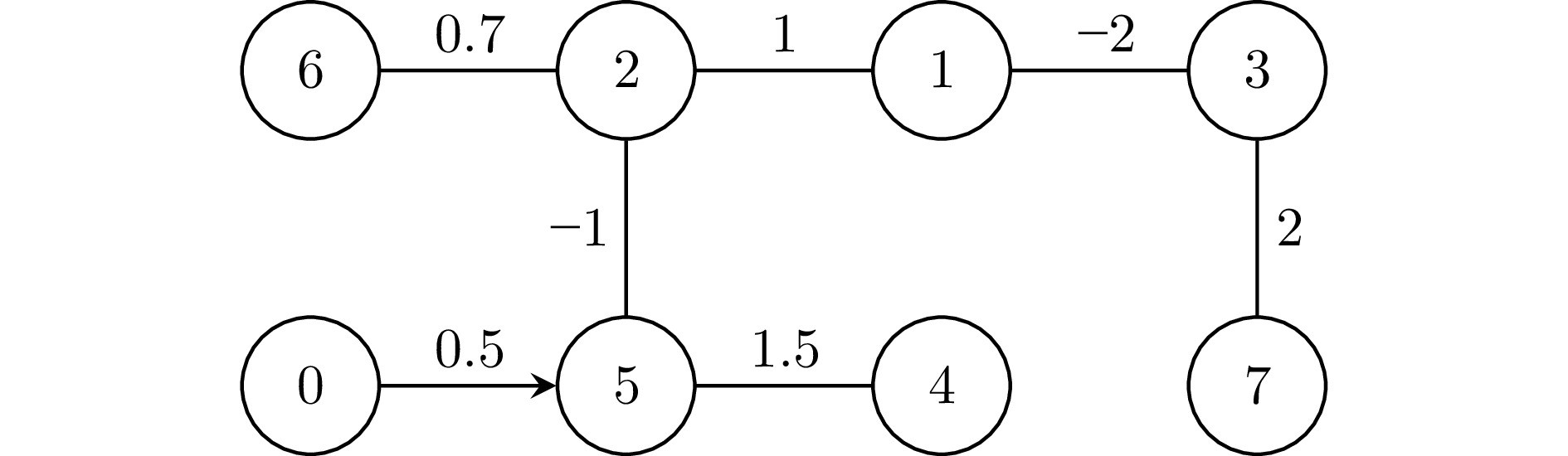
图 2 通信图
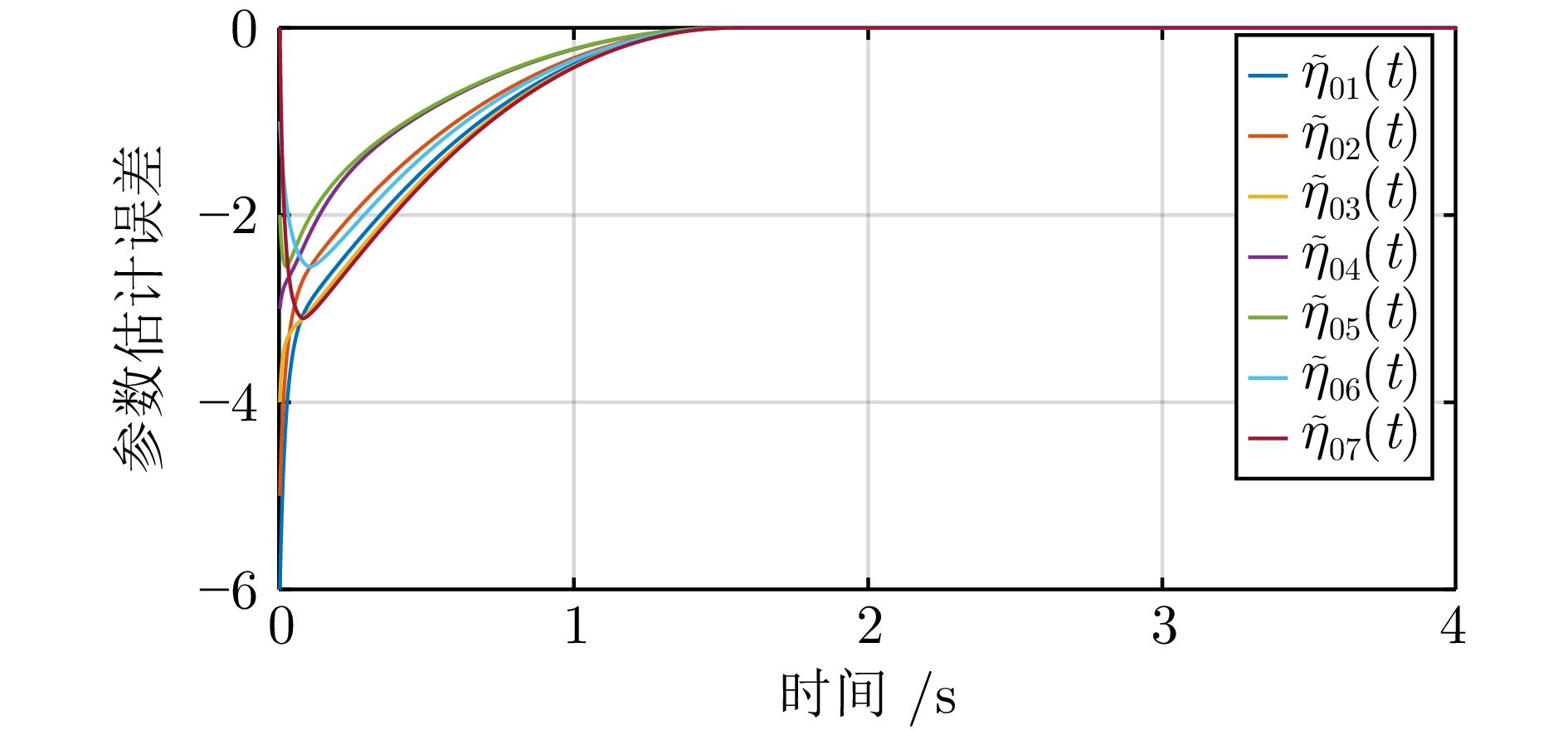
图 3 参数估计误差 $\tilde{\eta}_{0i}(t),\; i=1,\;2,\;\cdots,\;7$
通过设计基于命令滤波与复合学习的反推控制协议, 解决了模型参数不确定下多无人艇系统的固定时间二分编队跟踪控制问题. 与已有的相关工作相比, 本文具有以下优势: 通过引入命令滤波技术, 提出的控制协议避免了计算虚拟控制输入的导数, 极大地简化了分布式控制器的设计; 通过引入复合学习技术, 在不需要 PE 条件的情况下, 保证了跟踪误差和参数估计误差的固定时间收敛性. 未来主要关注有向符号图下具有时变参数不确定性影响的多无人艇系统固定时间分布式控制问题, 以及多无人机−无人艇跨域协同控制问题.
作者简介
温广辉
东南大学系统科学系教授. 主要研究方向为自主智能系统, 分布式控制与优化, 弹性控制, 分布式强化学习. 本文通信作者. E-mail: wenguanghui@gmail.com
余星火
皇家墨尔本理工大学工学院教授. 主要研究方向为多智能体系统, 分布式控制, 滑模控制. E-mail: xinghuo.yu@rmit.edu.au
黄廷文
深圳理工大学计算机科学与控制工程学院教授. 主要研究方向为多智能体系统, 自适应控制, 最优控制. E-mail: huangtw2024@163.com
周艳
东南大学系统科学系博士后. 主要研究方向为多智能体系统, 分布式控制, 最优控制, 学习控制. E-mail: zhouyanxh@gmail.com
https://wap.sciencenet.cn/blog-3291369-1484053.html
上一篇:嵌套运动饱和下分布式多移动机器人反振荡安全编队控制
下一篇:基于分布式自适应内模的多智能体系统协同最优输出调节