博文
嵌套运动饱和下分布式多移动机器人反振荡安全编队控制
|
引用本文
郑志, 江涛, 杨玥, 苏晓杰. 嵌套运动饱和下分布式多移动机器人反振荡安全编队控制. 自动化学报, 2025, 51(3): 658−668 doi: 10.16383/j.aas.c240444
Zheng Zhi, Jiang Tao, Yang Yue, Su Xiao-Jie. Distributed multi-mobile robot anti-oscillation safety formation control with nested motion saturation. Acta Automatica Sinica, 2025, 51(3): 658−668 doi: 10.16383/j.aas.c240444
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c240444
关键词
分布式移动机器人编队,嵌套运动饱和,动态安全围栏,低触发势能函数,自适应振荡抑制
摘要
运动受速度和加速度嵌套饱和约束, 而反应式躲避安全机制下分布式编队互联的移动机器人更易触发该嵌套饱和, 从而引起编队的剧烈振荡, 所以需要研究该情况下多移动机器人平滑安全协同及其自适应振荡抑制方法. 故以分布式网络中的移动机器人为研究对象, 首先构建基于视线和速度的低触发势能函数, 实现邻近编队机器人近距排斥作用下的避碰保持; 引入驱动机器人绕过障碍物的安全加速度包络, 并复合近距排斥的弱能量、低触发势能, 避免与非合作障碍物的碰撞. 其次, 嵌入复合自适应辅助动态系统, 平滑躲避过程中触发的嵌套运动饱和与安全加速度约束引起的轨迹振荡; 设计复合非线性反馈框架下的分布式编队控制器, 融合混合的躲避和振荡抑制机制, 实现多机器人障碍环境下的安全编队. 最后, 与现有安全编队方法进行对比仿真和实验验证, 结果表明该方法在嵌套运动饱和约束下可显著提升编队的平滑和安全性能.
文章导读
近年来, 移动机器人协同作业由于信息共享、效率倍增等优势, 在物流运输、巡检值卫和智能制造等领域得到大规模应用, 并受到广泛关注. 移动机器人分布式编队是多机协同的关键基础任务, 包括领航跟随法[1]、行为法[2]、虚拟结构法[3]等多种应用框架, 其中, 领航跟随法由于设计的简易性和实用性而得到大量研究.
编队协同中的避障、避碰对移动机器人安全保障至关重要. 多机器人躲避障碍物和邻近移动单元主要有优化和反应式控制两种策略[4]. Franzè 等[5]将滚动时域和领航跟随结构相结合, 设计分布式模型预测控制架构, 用于躲避邻近单元和随机出现的障碍物. Park等[6]设计一种避免陷入局部最优的全局模型预测队形控制方法来避免相邻的移动机器人碰撞. 林俊亭等[7]提出一种基于人工势场的虚拟编组自适应模型预测控制方法, 在确保高精度控制和安全避碰的前提下, 提高了优化求解效率. 但以上基于优化求解的多机器人协同避障/避碰方法需占用大量计算资源, 并不适用于低算力的移动机器人嵌入式设备. 引入人工势能函数的排斥作用是避障/避碰最常用的安全控制策略. 黎星华等[8]和姚瀚晨等[9]分别引入斥力势场和虚拟弹簧模型用于编队中的移动机器人避障. Wang等[10]在编队控制器中嵌入斥力势场, 避免机器人之间的碰撞. Kamel等[11]利用人工势场同步实现多机器人编队的避障与避碰. 类似斥力场的障碍函数或类李雅障碍函数也被用于多机器人之间的避碰. Li等[12]利用避碰距离和障碍函数构造李雅普诺夫函数来设计控制器, 实现编队内机器人互相躲避. Dai等[13−14]将避碰距离引入障碍函数, 并重构编队控制反馈中的协同误差, 实现邻近机器人的避碰. 以上反应式避障/避碰方法均是构造与邻近机器人和障碍物视线方向相反的斥力来避免碰撞, 且均未考虑控制输入饱和的不利情况, 但此类安全机制容易在短时触发饱和, 从而引起编队剧烈振荡, 破坏移动机器人编队整体的暂态与稳态性能. 此外, 相对于斥力场极易触发振荡, 另外一类基于避碰锥绕过障碍物的反应式安全策略, 在控制输入饱和下, 振荡会明显改善, 但突发的航向变化也容易使得发生饱和的移动机器人转向不足, 从而并不能完全消除碰撞的风险[15].
部分文献考虑了运动饱和下多移动机器人编队的协同避障/避碰. Wang等[15]设计自适应增益以避免生成的线速度和角速度在躲避过程中超过设定的幅值, 但该方法并未考虑实际存在的加速度饱和, 且减小的控制增益容易造成转向不足, 不能完全保证编队的安全性. Fathian等[16]直接在移动机器人的线速度和角速度上施加幅值饱和, 并引入避碰锥绕过邻近的障碍物, 但未应对运动饱和触发的振荡影响. Lippay等[17]也采用自适应增益以保证控制输入在饱和阈值内, 但该机器人控制模型是二阶模型, 控制输入等价于加速度, 且未考虑速度的嵌套饱和作用. 张志伟等[18]在多机器人避障协同中生成速度和加速度饱和约束的编队轨迹, 并直接对后续设计控制输入的线速度和角速度施加幅值饱和, 但也缺少编队控制对速度和加速度嵌套饱和的直接干涉和由其引起的振荡处理. 总体来说, 现有编队控制方法鲜少在反应式安全策略下同时考虑移动机器人速度和加速度运动嵌套饱和, 并缺少抑制饱和振荡的自适应策略和方法研究.
总结现有编队安全机制, 基于势能排斥的安全策略更适用于避碰任务, 分布式网络下的机器人队形保持相对于邻近编队单元也是斥力作用, 可有效减小势能触发或叠加斥力场尽快脱离避碰范围. 但应对非合作性的避障任务, 单一斥力作用与其他编队任务冲突, 极易造成任务博弈下的运动堵滞, 触发运动饱和, 引起互联的机器人编队轨迹剧烈振荡. 基于避碰锥绕过障碍物的安全策略, 则由于航向的不连续与控制饱和, 也会造成编队的整体性能下降, 同时在避碰规则的设计方面也十分复杂. Ghaffari[19]提出一种绕过障碍的静态安全围栏策略, 通过生成安全加速度包络来约束机器人运动以保证其安全性, 但在动态安全围栏及其饱和振荡方面缺少研究, 在扰动影响下, 也难以保障其不越过安全边界, 限制其在复杂现实环境的深入应用.
综上所述, 针对现存问题和现有方法不足, 本文提出一种饱和振荡抑制的复合安全多机器人编队控制方法, 具体贡献如下:
1) 引入动态安全围栏和低触发势能复合安全策略, 通过低触发斥力场保证机器人与邻近单元的安全距离, 采用动态安全围栏生成加速度包络引导机器人绕过非合作的障碍物, 复合斥力场保证更完备的安全性. 相对于传统斥力策略[9−10, 12, 14], 更容易在多任务协同下保证轨迹平滑特性.
2) 采用复合自适应辅助动态系统抑制机器人固有的嵌套运动饱和与安全加速度包络引起的编队轨迹振荡. 相对于文献[15−16], 实际存在的速度和加速度嵌套饱和约束是首次考虑, 且不可忽略.
3) 设计复合非线性反馈下分布式安全编队控制框架, 搭建多机器人数值仿真与集群实验平台, 通过与现有安全编队方法对比, 凸显所提出方法在嵌套运动饱和下编队安全性和平滑性的优势.
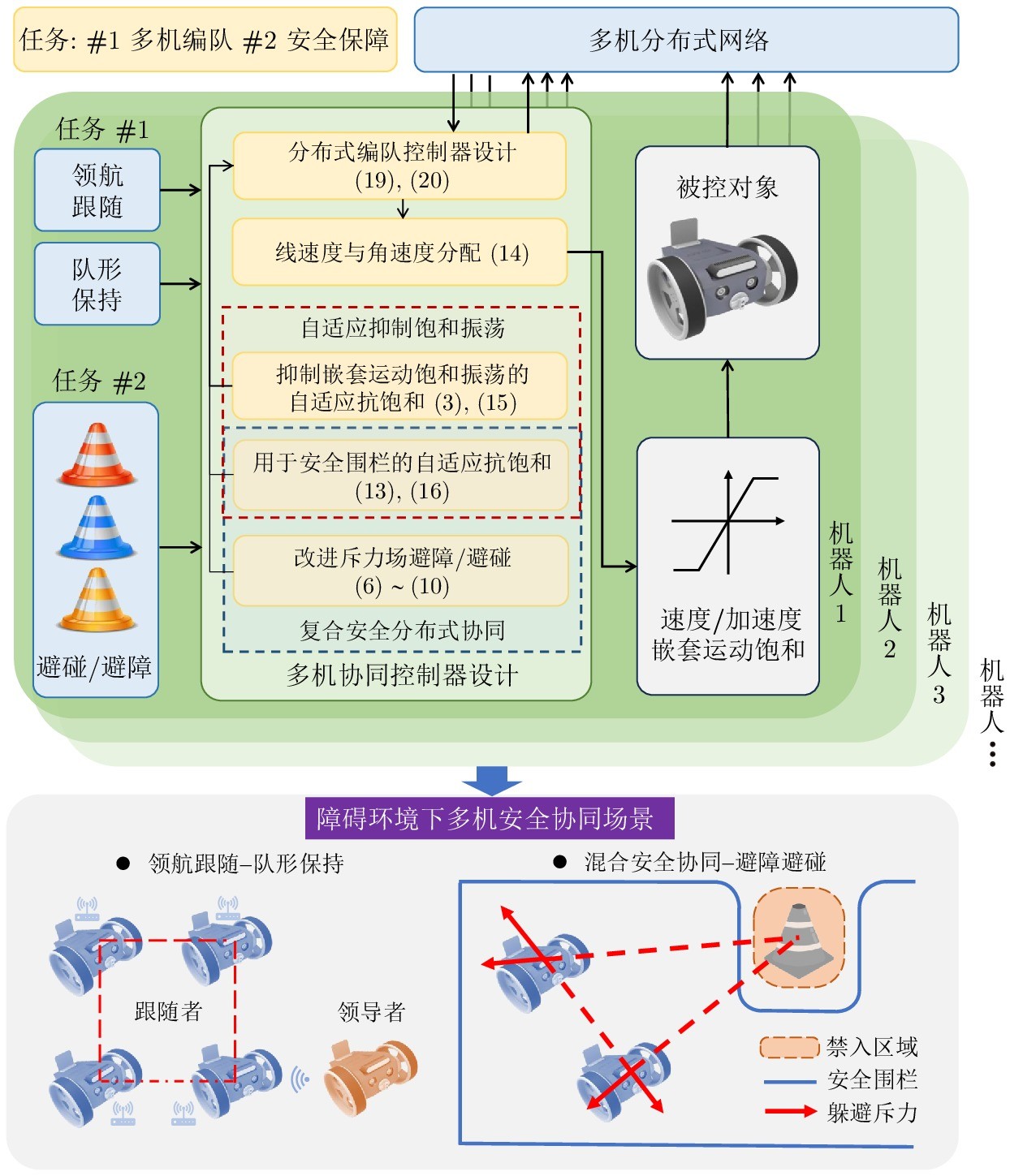
图 1 多机器人分布式控制框图

图 2 基于势场的安全协同
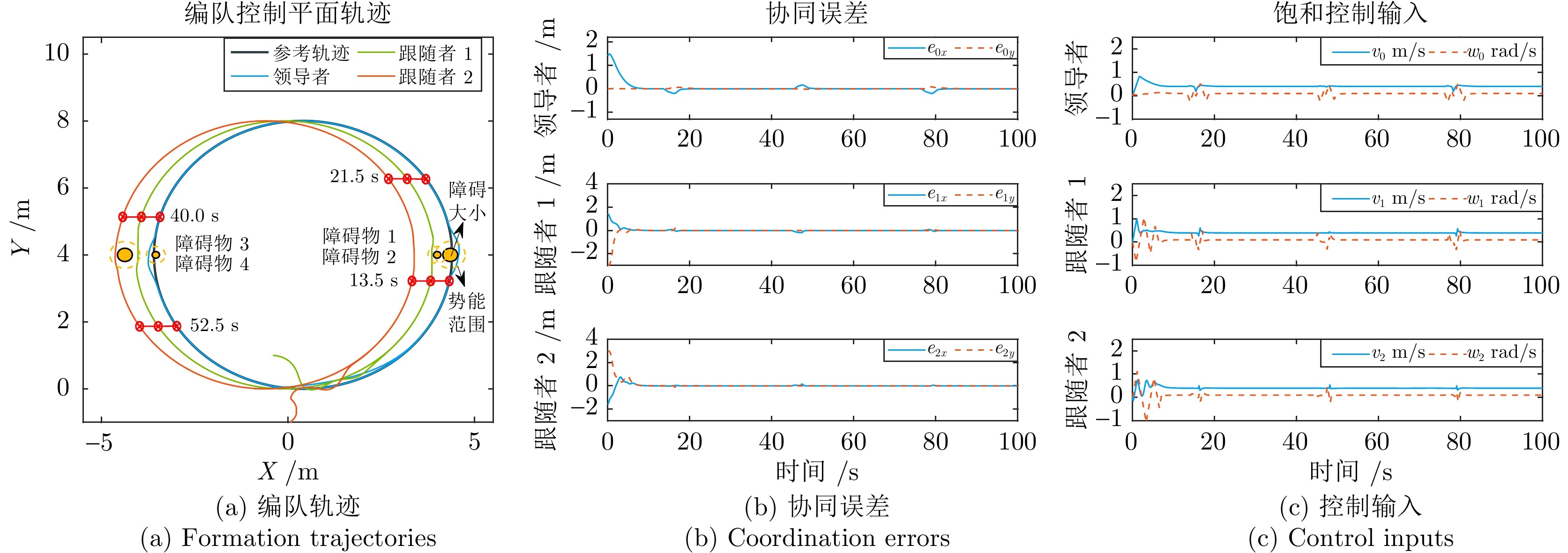
图 3 所提出方法编队控制结果
本文首先设计构建安全动态围栏和低触发势能函数的复合安全策略, 实现障碍环境下的多机器人安全保障. 其次, 引入复合自适应辅助动态系统, 平滑抑制编队机器人固有的嵌套运动饱和与安全加速度包络触发的严重振荡. 然后, 融合安全和反振荡机制, 设计复合非线性反馈下的分布式编队控制器, 同步完成领航跟随、队形保持和避障/避碰的多任务协同. 最后, 自建多机器人集群仿真和实验平台, 通过综合对比实验, 验证所提出方法在障碍环境下平滑与安全的优势. 未来拟聚焦本文尚未涉及的非质点/非规则/非静态复杂障碍物类型和复杂决策优化相关的安全围栏自动生成策略, 进一步推动其在复杂场景全无人化应用落地.
作者简介
郑志
重庆大学自动化学院博士研究生. 2020年获得哈尔滨工程大学硕士学位. 主要研究方向为多智能体系统协同. E-mail: zhizheng@cqu.edu.cn
江涛
重庆大学自动化学院副教授. 2020年获得北京理工大学博士学位. 主要研究方向为飞行器控制与轨迹规划. 本文通信作者. E-mail: jiangtao_1992@cqu.edu.cn
杨玥
西安建筑科技大学信息与控制工程学院副教授. 2022年获得重庆大学博士学位. 主要研究方向为智能控制与自主无人系统应用. E-mail: yangyue@xauat.edu.cn
苏晓杰
重庆大学自动化学院教授. 2013年获得哈尔滨工业大学博士学位. 主要研究方向为智能控制系统及其在无人系统中的应用. E-mail: suxiaojie@cqu.edu.cn
https://wap.sciencenet.cn/blog-3291369-1484050.html
上一篇:安全约束及外部扰动下的四旋翼无人机保成本姿态跟踪控制
下一篇:模型参数不确定下多无人艇系统固定时间二分编队跟踪控制