博文
未知外部输入传感器网络异步触发分布式滚动时域估计
|
引用本文
徐晨辉, 何德峰, 杜海平. 未知外部输入传感器网络异步触发分布式滚动时域估计. 自动化学报, 2025, 51(7): 1642−1650 doi: 10.16383/j.aas.c240802
Xu Chen-Hui, He De-Feng, Du Hai-Ping. Asynchronous triggered distributed moving horizon estimation for sensor networks with unknown external inputs. Acta Automatica Sinica, 2025, 51(7): 1642−1650 doi: 10.16383/j.aas.c240802
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c240802
关键词
无线传感器网络,滚动时域估计,事件触发机制,输入−状态稳定性,分布式状态估计
摘要
考虑未知外部输入无线传感器网络的约束分布式状态估计问题, 提出一种新型异步触发分布式滚动时域估计方法. 首先针对传感器网络节点的有限观测能力与资源约束, 设计基于异步事件触发机制的数据交互策略. 同时为抑制异步事件触发可能引入的最坏影响, 构建基于min-max优化的分布式滚动时域状态估计器. 其次, 通过松弛输入矩阵条件, 建立保证估计误差满足输入−状态稳定性的充分条件, 并利用该条件离线确定估计器参数. 进一步, 将状态估计器等价转化为基于线性矩阵不等式的凸规划问题, 减轻估计器在线计算负担. 最后, 通过对比实验验证了本文方法的优越性.
文章导读
无线传感器网络(Wireless sensor networks, WSNs)已成为当前工业物联网的关键基础设施[1−2]. 通过不同节点传感器对物理系统的实时感知与协同计算, WSNs可以实现对动态过程的全域状态重构[3−4], 其中, 分布式状态估计(Distributed state estimation, DSE)通过拓扑自适应的局部观测耦合机制, 可有效解决复杂环境下系统状态不可直接测量的难题, 同时具有很好的可扩展性与容错性, 目前已广泛应用于能源、物流和智能交通等领域的监测[5−8].
在工业系统监测中, WSNs常受到环境噪声、物理干扰及人为攻击等未知外部输入(Unknown external inputs, UEIs)的复合影响, 恶化传感器网络DSE的估计精度, 甚至使估计误差系统失去稳定性[9]. 对此, 相关学者通过嵌入未知输入观测器, 提出一些联合估计方法[10−14], 如文献[12]将时不变UEIs的估计问题重构为跟踪问题, 进而设计一类最优估计器; 文献[9]采用共识合作策略提出一种完全分布式的未知时变输入观测器; 文献[10]进一步引入自适应调节机制实现观测器降阶与节点计算负载优化, 但没有关注估计器在扰动环境下稳定性问题; 而文献[15]通过消除对未知输入观测器的依赖, 简化了估计流程, 但对UEIs上界信息的先验假设显著削弱了工程适用性.
近年来, 滚动时域估计因兼具有状态和UEIs联合估计与显式处理系统约束的能力, 已成为WSNs 约束分布式状态估计的重要方法[16−18], 如文献[16]通过代价函数及约束条件的参数设计, 将UEIs与估计误差动力学解耦, 并确保估计误差系统的稳定性, 但集中式框架难以满足大规模WSNs状态估计的实时性要求. 一种潜在的解决方案是引入分布式估计框架, 如文献[9−11]通过假设局部节点具有独立完整辨识UEIs的能力, 提出UEIs作用下WSNs分布式状态估计方法, 但这些方法无法显式地处理系统约束和性能优化, 同时节点受限于测量维度不足、物理配置约束及输入不可观测性等因素, 上述假设往往难以成立, 从而导致DSE性能显著退化.
另一方面, 为提高节点的测量维度和观测能力, 常见的方法是增加节点之间的数据交互, 但受限于电池供电的固有特性, 高频次数据交换将急剧增加WSNs的能耗, 严重制约网络生命周期. 一种潜在的解决该矛盾的方案是引入事件触发机制(Event trigger mechanism, ETM), 目前已成为传感器网络DSE研究的重要方向[19−23], 如文献[21−22]设计静态ETM调控测量数据的传输; 文献[23]采用动态阈值调节机制提高对通信资源的利用率; 文献[24]将ETM引入集中式滚动时域估计设计; 而文献[25]构建基于静态ETM的分布式滚动时域估计(Distributed moving horizon estimation, DMHE)方法; 文献[26]则将ETM与到达代价共识算法[17]结合, 提出一种基于事件触发的分布式滚动时域一致性估计算法. 然而, 这些方法忽略了UEIs对DMHE的复杂影响, 即, UEIs通过干扰误差动态, 易导致基于局部状态误差或残差设计的ETM出现误触发或延迟触发现象, 同时ETM在非触发时刻引入的数据缺失误差增加了UEIs估计的不确定性, 进而将加速估计误差的累积效应. 据笔者调研可知, UEIs作用下基于ETM的DMHE仍是个开放性问题.
本文考虑UEIs作用下的WSNs约束分布式状态估计问题, 提出一种新的WSNs异步时间触发分布式滚动时域估计方法. 首先为该WSN设计异步ETM (Asynchronous ETM, AETM), 调控节点之间包括状态估计和测量数据在内的局部信息交互频次, 实现对UEIs的分布式估计. 其次, 为处理AETM和测量噪声引入的不确定性, 构造基于min-max优化的分布式滚动时域状态估计器. 该估计器将UEIs与状态估计误差动力学解耦, 并在AETM可能产生的最坏影响下寻找对局部测量和系统状态的最佳估计, 提高了估计精度. 进一步, 通过本地节点与邻居节点的联合辨识UEIs, 建立保证估计误差满足输入−状态稳定性(Input-to-state stability, ISS)的充分条件. 在此基础上, 给出基于线性矩阵不等式(Linear matrix inequality, LMI)的DMHE等价求解方法, 降低了分布式滚动时域状态估计器的在线计算量. 最后, 通过车辆悬架系统状态估计实验验证了本文方法的优越性和实用性.
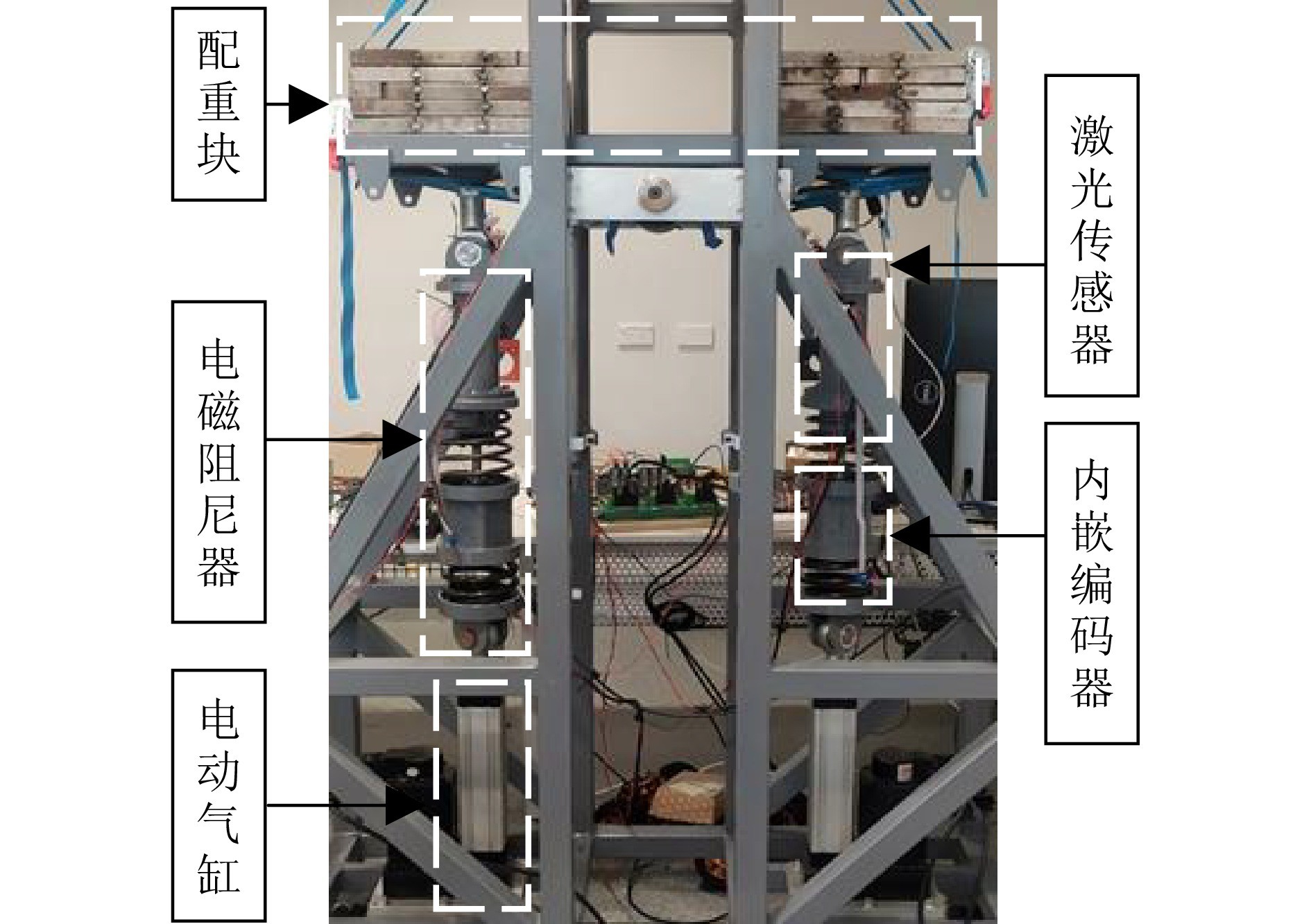
图 1 半车悬架物理系统
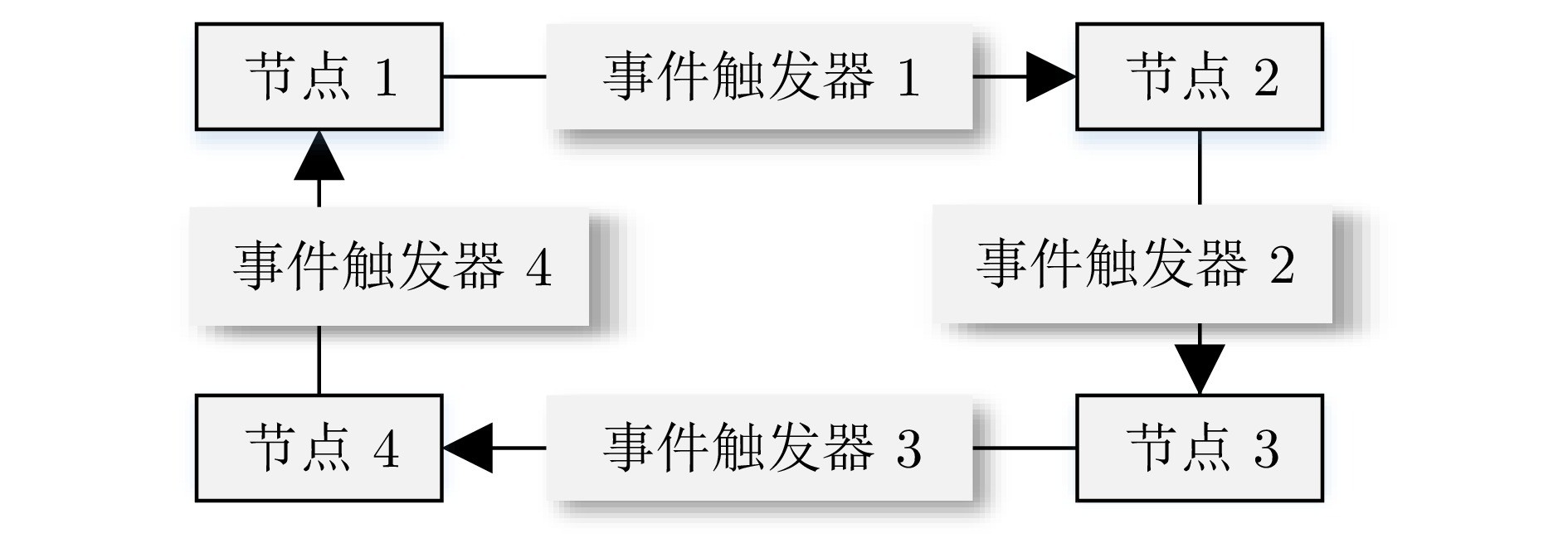
图 2 包含4个节点的WSN
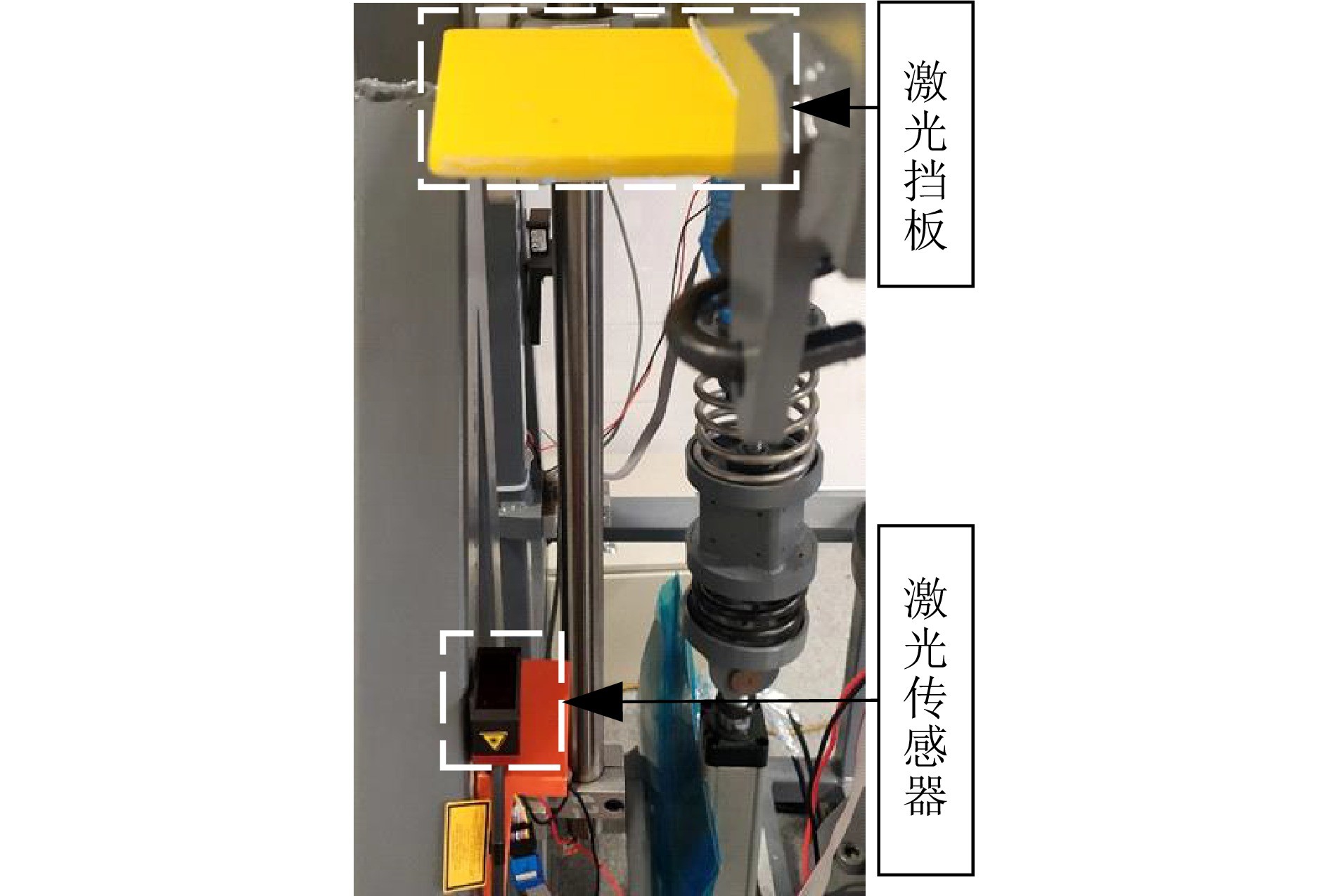
图 3 激光传感器
本文考虑UEIs作用下无线传感器网络DSE问题, 提出一种新的基于异步事件触发的DMHE方法. 通过加强节点间的数据交互, 增强了WSNs中单个节点对UEIs的观测能力, 并通过设计AETM降低了数据交互产生的通信能耗. 在此基础上, 设计基于min-max优化的事件触发分布式滚动时域估计器, 该估计器将UEIs与估计误差解耦, 并补偿了AETM和测量噪声引入的不确定性. 在放宽现有研究对输入矩阵假设的前提下, 建立保证估计误差满足ISS的LMI条件, 利用这些条件能够离线确定估计器参数. 为了减轻节点的在线计算负担, 将min-max优化问题转化成凸规划问题, 由此给出一种计算效率更高的等价求解方法. 实验对比结果验证了所提方法的有效性和实用性. 未来工作考虑将核心结果扩展到具有非线性动力学和链路故障的复杂移动WSNs中.
作者简介
徐晨辉
浙江工业大学信息工程学院博士后. 2024年获得浙江工业大学博士学位. 主要研究方向为传感器网络分布式状态估计. E-mail: 2111903294@zjut.edu.cn
何德峰
浙江工业大学信息工程学院教授. 2001年和2008年分别获得中南大学学士学位和中国科学技术大学博士学位. 主要研究方向为智能预测与最优控制, 网络系统优化控制. 本文通信作者. E-mail: hdfzj@zjut.edu.cn
杜海平
伍伦贡大学电气、计算机和电信工程学院教授. 2002年获得上海交通大学博士学位. 主要研究方向为鲁棒控制理论与应用. E-mail: hdu@uow.edu.au
https://wap.sciencenet.cn/blog-3291369-1499144.html
上一篇:基于IT2FBLS强化学习PID的MSWI过程炉膛温度控制
下一篇:基于功能脑网络和图特征学习的ADHD分类模型