博文
基于混合双端事件触发机制的协同控制策略研究
|
引用本文
李冬妮, 孙佳月, 闫宇晴, 张化光. 基于混合双端事件触发机制的协同控制策略研究. 自动化学报, 2025, 51(4): 792−803 doi: 10.16383/j.aas.c240354
Li Dong-Ni, Sun Jia-Yue, Yan Yu-Qing, Zhang Hua-Guang. Cooperative control strategy research based on hybrid dual-terminal event-triggered mechanism. Acta Automatica Sinica, 2025, 51(4): 792−803 doi: 10.16383/j.aas.c240354
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c240354
关键词
混合双端事件触发机制,改进的状态触发机制,多智能体系统,规定性能方法
摘要
针对非线性多智能体系统, 提出基于混合双端事件触发机制的模糊跟踪控制策略. 首先, 相比于现存状态触发机制, 构建一种灵活可调的阈值设计方法以满足系统实时性需求; 其次, 改进的状态触发机制将状态估计信号作为触发信号, 可有效降低现存机制的保守性并提高阈值设计的灵活性; 随后, 针对控制器−执行器环节和传感器−控制器环节, 设计混合双端事件触发机制来同时缓解双信道的通讯负担. 此外, 为解决未知不可测状态的问题, 构造一种仅基于相对输出信息的状态观测器. 最后, 在闭环系统内, 所有信号都是半全局一致最终有界稳定的, 并用一个实际的仿真例子证明了提出控制策略的可行性.
文章导读
多个独立的智能体通过信息交互以及多种方式组成多智能体系统[1−6], 旨在解决单个智能体无法解决的大规模复杂性任务. 多智能体系统能够完成在复杂网络下的信息传递, 已广泛应用在诸多重要的实际场景. 特别地, 多智能体系统的跟踪控制策略[10−11]一直是进一步探索的热点研究方向. 例如, 文献[12]研究针对多智能体系统网络化预测PID的控制问题来达到输出信号一致性. 文献[13]针对带有非线性扰动的多智能体系统, 提出基于神经网络的自适应控制策略来实现共识控制目标. 然而, 智能体之间的信息交互严格依赖网络环境, 特别是存在大量智能体时将同时占用多个网络通讯渠道, 不可避免地导致沉重的网络负担, 这一现象亟需解决.
近年来, 为缓解信息传递渠道上的通讯压力, 学者们提出事件触发策略[14−18]使控制器以非周期的方式更新. 文献[19]提出针对多智能体系统的事件触发分布式控制策略, 包括固定阈值策略、相对阈值策略和切换阈值策略. 根据这一概念, 相继研究出多种新颖的事件触发机制. 例如, 动态事件触发机制、状态触发机制和记忆事件触发机制等. 其中, 状态触发机制[20−21]引起广泛关注. 特别地, 文献[21]首次提出基于状态触发机制的非线性多智能体系统自适应一致性控制方案, 设计的事件触发机制首先通过采样信号值与系统真实值构造出采样误差, 随后转换得到带有触发信号的同步误差, 并将之设计到控制输入信号中来缓解控制器−传感器渠道上的通讯压力. 值得注意的是, 现存文献中状态触发机制的阈值条件是动态变化的, 并且会采用根据分解的方式将产生的采样误差值的平方项化为常数项的方法判断下一次采样时刻. 需要进一步指出的是, 该阈值条件的设计方法严格依赖于稳定性条件, 从而限制阈值条件设计的灵活性. 但在实际系统的真实状况中, 状态信息通常不可测量, 因而会导致控制方案实施的准确性. 因此, 提出状态观测器来实现对原系统重构, 从而满足反馈控制的需要. 所以, 在大规模实际系统的控制运行中, 首先需要解决在未知状态不可测情况下系统通讯渠道负担重的问题, 并且在信息传递过程中多个通讯链路上的资源节约问题同样值得注意. 例如, 控制器−执行器环节、传感器−控制器环节、智能体与智能体之间的通讯渠道等. 因此, 如果实现同时在多个通讯渠道上节约通讯资源势必会大幅度降低整体控制系统通讯带宽占用率.
值得关注的是, 一些非线性因素[22−28]可能会导致系统性能下降或系统抖震现象发生. 模糊逻辑系统或神经网络是处理非线性项的常用近似工具. 然而在大多数情况下, 模糊逻辑系统或神经网络的逼近能力是有限的, 并且其逼近效果取决于模糊规则或神经网络节点的数量. 因此, 系统中非线性因素的存在会导致系统不稳定. 为解决上述情况并保证系统的实时性能, 文献[29]提出规定性能控制方法, 通过将跟踪误差约束在预定的范围内实现对系统瞬态性能和稳态性能的保证. 文献[30]针对非线性多智能体系统, 设计新颖的规定性能转换函数. 文献[31]利用误差转换方法和规定性能控制策略设计分布式自适应控制器来保证控制目标的有效实现. 因此可以看出, 规定性能控制方法在确保系统性能方面十分有效, 并且当发现性能指标无法满足时, 该机制可以及时采取相应的容错措施以提高系统的可靠性和安全性.
因此, 考虑到非线性多智能体系统中通讯资源负担重以及现存状态事件触发机制的阈值设计条件具有一定局限性的双重问题, 本文展开基于混合双端事件触发机制的协同控制策略研究, 旨在提升现存状态事件触发机制阈值设计的灵活性且改善多通讯渠道的通讯压力状况, 进一步拓展多智能体系统一致性控制策略的多样性.
本文主要贡献如下:
1) 与现存结果[21]相比, 所提出的状态触发机制的阈值条件可以在不使用杨氏不等式的情况下直接设计, 从而减少现有控制方案的缩放次数和保守性. 并且首次使用估计状态进行采样, 扩展了状态触发机制的应用范围. 基于新的状态触发机制与控制器触发机制, 构造新的双端分布式触发框架, 在较少的参数设计限制下, 具有更小的通讯压力.
2) 基于规定性能技术特性提出的自适应控制方案既减少系统不稳定情况发生的概率, 又保证多智能体一致性任务的精确度. 此外, 所设计的分布式观测器仅依赖于相对输出信息进行反馈调节来解决状态不可测问题, 具有良好的可扩展性和灵活性.
本文的组织结构安排如下. 第1节给出本文工作所需的预备知识; 第2节介绍模糊状态观测器的设计过程; 为获得预期的控制目标, 第3节提出自适应分布式控制器的设计方法、稳定性及芝诺行为分析; 第4节通过一个实际仿真例子证明了所提出策略的有效性; 第5节给出本文的结论, 并对未来进行展望.

图 1 通讯拓扑图

图 2 4个跟随者和1个领导者的输出轨迹
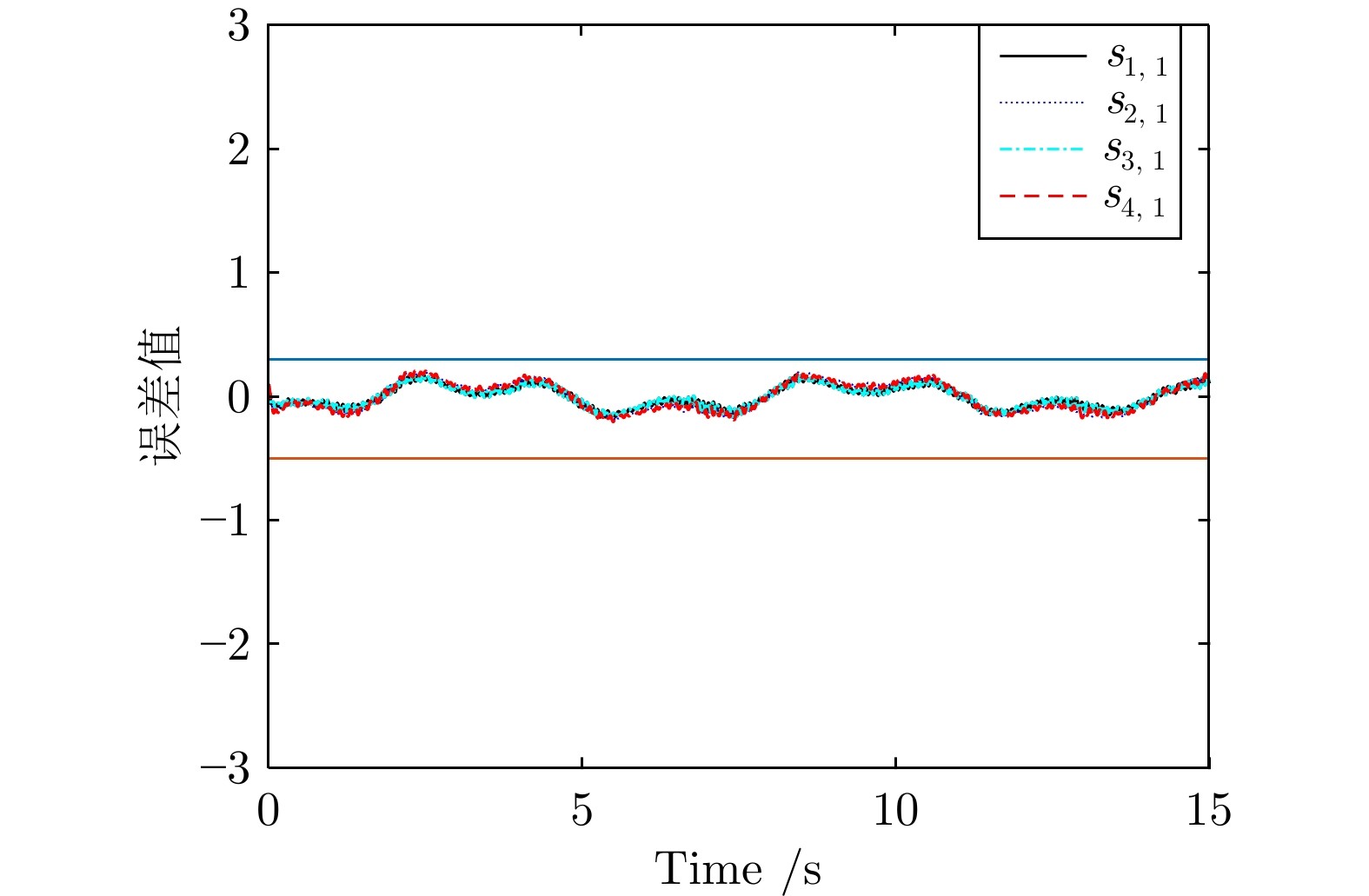
图 3 跟踪误差的轨迹
本文研究了双端事件触发自适应模糊跟踪控制问题. 针对控制器−执行器和传感器−控制器环节, 提出基于状态触发机制和控制器触发机制的混合双端分布式事件触发机制, 并且设计一种改进的状态触发机制, 首次将估计的状态信号作为触发信号来达到节约通讯资源的目的. 最终, 一些仿真结果证明了所提出控制方案的有效性. 在未来的研究工作中, 我们将致力于探索电力系统控制需求, 并将多种事件触发控制策略融合实际系统的需要, 以满足智能化、高效化与绿色化的能源转型目标.
作者简介
李冬妮
东北大学信息科学与工程学院博士研究生. 2024年获得渤海大学硕士学位. 主要研究方向为自适应控制, 神经网络控制, 多智能体系统的分布式控制及其应用. E-mail: 2410269@stu.neu.edu.cn
孙佳月
东北大学信息科学与工程学院教授. 主要研究方向为复杂工业过程优化, 智能自适应学习, 多智能体系统分布式控制及其应用. 本文通信作者. E-mail: sunjiayue@ise.neu.edu.cn
闫宇晴
东北大学信息科学与工程学院博士研究生. 2018年获得辽宁师范大学学士学位. 主要研究方向为分数阶系统. E-mail: yanyuqing@whut.edu.cn
张化光
东北大学信息科学与工程学院教授. 主要研究方向为模糊控制, 随机系统控制, 基于神经网络控制, 非线性控制及其应用. E-mail: hgzhang@ieee.org
https://wap.sciencenet.cn/blog-3291369-1486316.html
上一篇:基于变分稀疏高斯过程的多机器人协同感知与围捕
下一篇:异构不确定二阶非线性多智能体系统事件触发状态趋同