博文
哈工大赫晓东院士/彭庆宇教授等:蛇形软体机器人用于多模态运动和螺旋抓取  精选
精选
|
研究背景
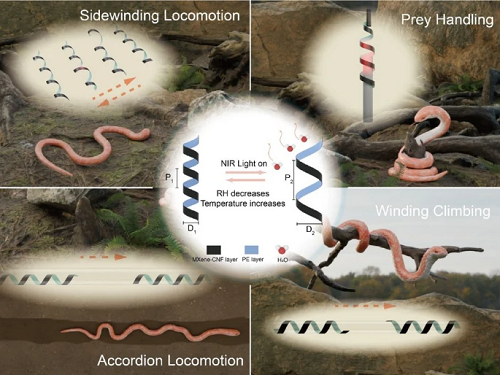
研究人员从自然界生物系统中获取了大量灵感,开发出许多各具特色的软体机器人,像模仿昆虫幼虫的跳跃机器人、模仿猴子的攀爬机器人等。然而,现有的仿生软体机器人存在不少局限,比如活动能力受限、应用场景单一,大多只能依赖单一的运动模式。蛇作为一种极具特点的生物,拥有多样化且强大的运动能力,如缠绕猎物、侧绕爬行、手风琴爬行和蜿蜒攀爬等,这为软体机器人的设计提供了新的思路。虽然此前也有不少受蛇启发的机器人研究,但大多存在体积大、依赖气动控制或只能模仿单一运动模式的问题,因此开发小型、无绳且能实现多模态运动的蛇形软体机器人具有巨大的应用潜力。
From Coils to Crawls: A Snake‑Inspired Soft Robot for Multimodal Locomotion and Grasping
He Chen, Zhong Chen*, Zonglin Liu, Jinhua Xiong, Qian Yan, Teng Fei, Xu Zhao, Fuhua Xue, Haowen Zheng, Huanxin Lian, Yunxiang Chen, Liangliang Xu, Qingyu Peng*, and Xiaodong He*
Nano-Micro Letters (2025)17: 243
https://doi.org/10.1007/s40820-025-01762-9
本文亮点
1. 通过理论计算、有限元分析和直接油墨书写(DIW)技术相结合,开发了一种可调初始卷绕结构软体机器人(ICSBot)。
2. 通过模仿蛇的猎物处理行为,ICSBot能够起到螺旋抓取器的作用,能够实现动态展开、抓取物体和可控释放。
3. 通过模拟蛇的多模式运动,ICSBot展示了在近红外光辐射下侧绕运动以穿过非结构化环境,手风琴运动以穿过狭窄管道,以及蜿蜒攀爬运动沿管外爬行。
内容简介
目前,已经开发了许多受自然生物系统启发的仿生机器人。然而,创造具有多种运动模式的软体机器人仍然是一个重大挑战。蛇作为无脊椎动物爬行动物,表现出多样化和强大的运动能力,缠绕猎物、侧绕爬行、手风琴爬行和蜿蜒攀爬行等,使其成为仿生机器人研究的重点。
在这项研究中,哈尔滨工业大学赫晓东院士、彭庆宇教授研究团队与东方电气集团科学技术研究院陈仲博士合作,提出了一种蛇启发的软体机器人(ICSBot),其具有初始螺旋结构。其制备方法是将MXene-纤维素纳米纤维(CNF)复合油墨通过直接油墨书写(DIW)技术印刷在预膨胀聚乙烯(PE)薄膜上。通过理论计算和有限元分析(FEA)预测ICSBot的初始结构,实现了ICSBot的可控制造,并设计和制造了可编程ICSBot。该机器人作为一个螺旋抓取器,能够在近红外光刺激下抓取形状复杂的物体。此外,它还展示了在各种环境中的多模式爬行运动,包括密闭空间、非结构化地形以及管道内外。这些结果为设计和制造初始螺旋结构软体机器人提供了一种新的策略,并突出了它们在智能和多功能机器人中的潜在应用。
图文导读
I ICSBot的设计与制造
ICSBot 的制备过程融合了先进技术。研究人员通过直接墨水书写(DIW)技术,将MXene-纤维素纳米纤维(CNF)墨水打印在预膨胀的聚乙烯(PE)薄膜上。在制备过程中,先利用 HCl/LiF 混合溶液蚀刻法合成Ti3C2Tx MXene,再将其与CNF按一定质量比混合制成墨水。打印时,将PE薄膜预热后,挤出墨水,在不同角度下打印,冷却后快速揭下,就能得到具有可控初始卷绕结构的双层薄膜。而且,研究人员还通过理论计算和有限元分析(FEA)来预测和优化 ICSBot 的初始结构,发现打印角度和打印平台温度对其螺旋结构的螺距和直径影响很大,实验结果也验证了这一模型的准确性,为 ICSBot 的可控制造提供了保障。此外,FEA方法有助于快速设计具有复杂初始结构的ICSBot。这些复杂几何结构的可编程ICSBot推动了下一代软体机器人的发展。
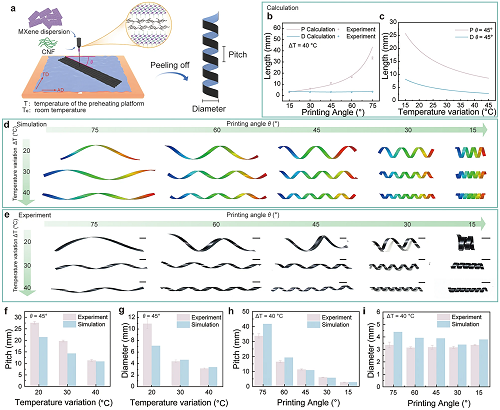
图1. ICSBot的设计与制造。
II ICSBot的驱动性能
ICSBot表现出优异的驱动性能,在光、湿度和温度等多种刺激下都能有不同的表现。由于MXene-CNF层具有优异的光热转换性能,在近红外(NIR)光照射下,能迅速将光能转化为热能,使自身温度升高,导致水分子脱附而收缩,而PE层则产生各向异性热膨胀,两者的应变不匹配使 ICSBot产生解旋变形;光照停止后,它又能恢复原状。在不同的NIR光强度下,ICSBot的螺距和直径变化可逆,且光强越大,响应速度越快。湿度增加时,MXene - CNF层因吸水膨胀,会使ICSBot 发生螺旋变形。温度变化同样能引起它的变形,高温会使 PE 层膨胀导致ICSBot解旋变形,低温(如液氮蒸汽环境)则会让它显著收缩。
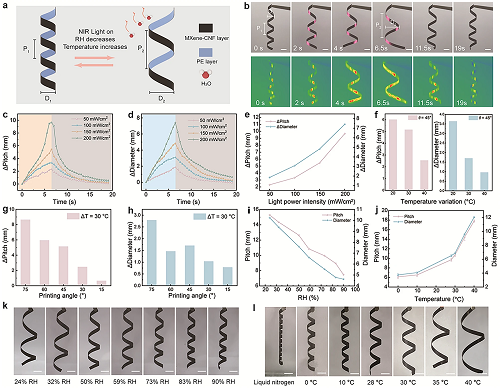
图2. ICSBot的驱动性能。
III 蛇灵感的螺旋抓取
受蛇的捕食行为启发,ICSBot被设计成了一个螺旋抓手。在NIR光照射下,它能从螺旋状态展开,移动到目标物体外部,光照停止后,又会恢复卷曲,紧紧抓住物体,再次光照则可释放物体。与传统的多臂软体机器人抓手相比,ICSBot能紧密缠绕物体,大大增加了接触摩擦,可抓取各种形状的物体,从细长的圆柱体到 L 形、球形、三角形棱柱和长方体的牢固抓取说明了其抓取的通用性,并且得益于初始的卷绕结构,其在狭小空间内的操作优势明显。
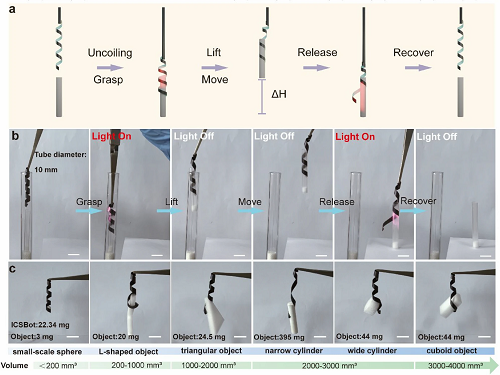
图3. 在近红外光照下ICSBot的螺旋抓取。
IV 蛇灵感的多模态爬行运动
4.1 侧绕爬行
模仿蛇在恶劣环境中的侧绕运动,ICSBot在NIR光照射下,通过部分结构的展开和重心的移动实现了可控的爬行。改变光照方向和打印角度,就能控制它的爬行方向和距离。它还能在负载(313%的自身重量)和非结构化环境(如波浪形沙地和楼梯状障碍物)中持续爬行,在高噪声环境下也能稳定运动,展现出强大的适应能力。
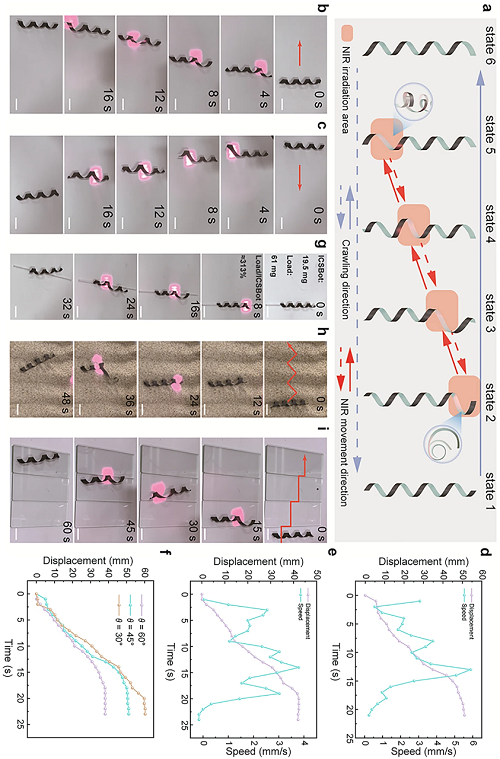
图4. 在近红外光照下ICSBot的侧绕爬行运动。
4.2 手风琴爬行
为了在狭窄空间中高效移动,ICSBot能像蛇一样进行手风琴运动。在NIR光的刺激下,它通过后端、中间和前端结构的依次展开和收缩,以及与管壁的摩擦力变化,实现向前移动。在6mm直径的管道中,它320秒能前进53.4mm,在倾斜管道和S形、U形管道中也能顺利通行,还能将管内的球形物体推出。
4.3 蜿蜒攀爬
ICSBot还具备模仿蛇蜿蜒攀爬的能力。在 NIR 光照射下,它能沿着管道外壁攀爬,通过前端、后端的次序展开和恢复,以及与管道的摩擦力,实现周期性的向前运动。在200秒内,它能沿着6mm直径的管道外壁攀爬19.4mm,并且在抖动的橡胶管上也能攀爬,拓展了在非结构化环境中的应用潜力。
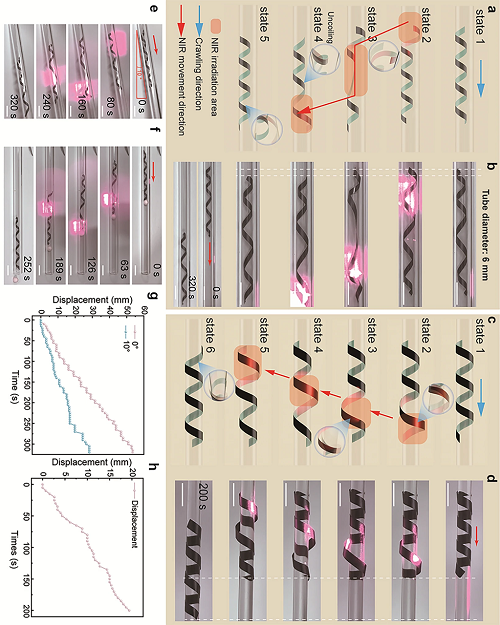
图5. 在近红外光照下ICSBot的手风琴爬行和蜿蜒爬行运动。
V 总结
ICSBot的诞生是软体机器人领域的一项重大突破。它通过DIW技术与理论计算、FEA相结合,实现了初始卷绕结构的精确控制。凭借MXene-CNF层和PE层的刺激响应特性,在多种刺激下展现出可逆的螺旋变形能力,进而实现了仿生抓取和多模态运动,在灵活性、刺激响应能力和运动模式多样性上远超其他同类软体机器人。未来,ICSBot有望在更多领域发挥重要作用。在医疗领域,它可以在人体内部的狭窄空间(如血管、肠道)中执行任务,进行疾病诊断和治疗;在工业领域,能在复杂的管道系统中进行检测和维护;在救援领域,可在灾难后的废墟中灵活穿梭,寻找幸存者。相信随着研究的不断深入,以ICSBot为代表的软体机器人将不断优化升级,为人们的生活和工作带来更多便利和惊喜。
作者简介

赫晓东
本文通讯作者
哈尔滨工业大学 教授
▍主要研究领域
复合材料力学、轻量化结构设计、制造与评价方面的研究,成果已经应用于火箭、飞行器和相关装备。
▍主要研究成果
赫晓东,哈尔滨工业大学教授、博士生导师、中国工程院院士、国家级重点实验室主任、特种环境复合材料结构和工程力学专家,教育部创新团队负责人、国务院学位委员会第八届力学学科评议组专家、商业航天产业技术创新联盟理事长、黑龙江省人大代表。获国家科学技术奖3项、省部级一等奖6项、黑龙江省省长特别奖、黑龙江省最高科技奖。出版专著6部,发表SCI论文350余篇,SCI他引11000余次。授权发明专利150余项,获软件著作权9项。
▍Email:hexd@hit.edu.cn

彭庆宇
本文通讯作者
哈尔滨工业大学 教授
▍主要研究领域
面向航天先进装备对于复合材料“轻、热、功、智”的迫切需求,重点开展低维材料宏观化与复合化制造的研究工作。聚焦智能复合材料前沿领域,围绕“柔性驱动/传感材料的多尺度结构设计与性能调控”和“复合材料结构-功能一体化创新体系构建”开展相关研究,涉及仿生智能器件、柔性电子及电磁防护等交叉应用。
▍主要研究成果
彭庆宇,教授,博士生导师,国家级青年人才、某部委重点项目首席技术专家,国家重点研发计划首席青年科学家。迄今为止在《Advanced Materials》、《Nano-Micro Letters》、《Advanced Functional Materials》、《ACS Nano》、《Engineering》、《Nano Energy》、《npj Flexible Electronics》、《Materials Horizons》等期刊发表SCI论文90余篇,其中4次被封面报道,引用4000余次,H-index为39,申请发明专利40余项。荣获2024年度中国复合材料学会科学技术奖一等奖,第二届中国科协“青年人才托举工程”,中国复合材料学会“杰出青年工程师奖”(两年评选一次,全国5名),黑龙江省自然科学基金优秀青年基金,首届中国复合材料优秀博士学位论文奖(全国5名)等奖励;作为项目首席技术专家获批某部委重点项目,作为负责人累计承担各部委项目20余项。
▍Email:pengqingyu@hit.edu.cn

陈仲
本文通讯作者
东方电气集团科学技术研究院 研发工程师
▍主要研究领域
(1)高性能纳米微球材料;(2)柔性传感及智能驱动材料;(3)纳米碳气凝胶材料。
▍主要研究成果
陈仲,2024年在哈尔滨工业大学获得博士学位,同年加入东方电气集团科学技术研究院有限公司,目前在东方电气洁能科技成都有限公司新材料所担任导电互联材料研发工程师。迄今在《Nano-Micro Letters》、《Acs Nano》、《Journal of Materials Science and Technology》、《ACS Applied Materials & Interfaces》等期刊累计发表SCI论文10余篇,引用400余次。申请发明专利6项,授权5项。
▍Email:nick.chenzhong@outlook.com
撰稿:原文作者
编辑:《纳微快报(英文)》编辑部
关于我们
Nano-Micro Letters《纳微快报(英文)》是上海交通大学主办、在Springer Nature开放获取(open-access)出版的学术期刊,主要报道纳米/微米尺度相关的高水平文章(research article, review, communication, perspective, highlight, etc),包括微纳米材料与结构的合成表征与性能及其在能源、催化、环境、传感、电磁波吸收与屏蔽、生物医学等领域的应用研究。已被SCI、EI、PubMed、SCOPUS等数据库收录,2023 JCR IF=31.6,学科排名Q1区前3%,中国科学院期刊分区1区TOP期刊。多次荣获“中国最具国际影响力学术期刊”、“中国高校杰出科技期刊”、“上海市精品科技期刊”等荣誉,2021年荣获“中国出版政府奖期刊奖提名奖”。欢迎关注和投稿。
Web: https://springer.com/40820
E-mail: editor@nmlett.org
Tel: 021-34207624
https://wap.sciencenet.cn/blog-3411509-1489090.html
上一篇:香港理工大学沈曦等:一种仿生各向异性水凝胶冷却器,用于全天候可持续被动冷却
下一篇:山大韩琳等:"分子剪刀-微纳电子"集成检测新范式,无扩增的高灵敏度、通用型CRISPR-GFET 核酸检测分析平台