博文
异构不确定二阶非线性多智能体系统事件触发状态趋同
|
引用本文
李振兴, 庄娇娇, 杨成东, 邱建龙, 曹进德. 异构不确定二阶非线性多智能体系统事件触发状态趋同. 自动化学报, 2025, 51(4): 804−812 doi: 10.16383/j.aas.c240423
Li Zhen-Xing, Zhuang Jiao-Jiao, Yang Cheng-Dong, Qiu Jian-Long, Cao Jin-De. Event-triggered state consensus of heterogeneous uncertain second-order nonlinear multi-agent systems. Acta Automatica Sinica, 2025, 51(4): 804−812 doi: 10.16383/j.aas.c240423
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c240423
关键词
多智能体系统,事件触发,不确定二阶非线性系统,状态趋同,异构系统
摘要
研究异构不确定二阶非线性多智能体系统事件触发状态趋同控制问题. 首先, 为每个智能体设计参数观测器, 用以估计不确定参数, 这些观测器可渐近估计不确定参数. 其次, 为每个跟随智能体设计分布式参数观测器, 渐近估计领导智能体不确定参数, 每个智能体利用邻居智能体触发时刻的采样值估计其邻居智能体的状态. 基于估计的参数和邻居状态, 提出完全不依赖智能体间连续信息传输的事件触发趋同算法. 同时, 证明在所给算法的作用下, 多智能体系统能够达到状态趋同且不存在芝诺现象. 最后, 给出一个多单摆系统, 用以验证事件触发趋同算法. 仿真实验结果表明, 跟随智能体的位置和速度可以渐近跟踪领导智能体的位置和速度, 并且整个多智能体系统平均每秒触发8.825次. 对比仿真实验显示, 所提出的事件触发趋同算法可有效减少事件触发次数.
文章导读
近20年, 多智能体系统的协同控制因其在无人机编队[1]、传感器网络同步[2]、多机器人协作[3]等工程中的广泛应用, 越来越受到控制理论领域学者们的关注. 传统的协同控制算法依赖智能体间的连续信息传输, 即使信息变化很小或没有变化仍然会进行信息传输, 这会造成电能、通信带宽、网络链路的低效利用[4]. 由于事件触发通信机制可以有效地节约能源和通信带宽, 基于事件触发机制的协同控制成为多智能体系统协同控制领域的研究热点[5−6]. 文献[7]给出一些基于事件触发通信机制的多智能体系统协同控制的研究成果.
多智能体系统事件触发协同控制领域的研究成果大多要求系统模型是精确可知的, 然而实际多智能体系统不可避免地存在未知参数、模型不确定、外部噪声等不确定因素. 文献[8]对无向网络的一类不确定非线性多智能体系统的事件触发趋同问题进行了研究. 文献[9]研究无向网络拓扑下一类二阶非线性多智能体系统的自适应事件触发趋同控制问题. 针对未知二阶非线性多智能体系统, 文献[10]利用自适应事件触发控制方法研究完全分布式控制问题. 文献[11]对网络拓扑信息未知的一般线性多智能体系统的完全分布式事件触发趋同问题进行研究. 针对控制方向未知的高阶多智能体系统, 文献[12]利用虚拟控制律设计自适应事件触发跟踪控制器. 文献[13]研究具有时滞和输入饱和的异构多智能体系统, 并给出基于观测器的事件触发趋同算法. 文献[14]利用组合测量事件触发机制, 研究拓扑结构为无向图的未知非线性二阶时滞多智能体系统的自适应趋同控制. 虽然文献[8−10, 14]研究的系统模型与本文相似, 但都采用基于组合测量的事件触发机制, 这种事件触发机制需要连续不断地监测邻居智能体的状态信息用以判断下一次触发时刻, 即算法依赖智能体间连续信息传输. 文献[15−16]利用输出调节理论, 对异构线性多智能体系统的事件触发输出同步问题进行研究. 文献[17]利用分布式内模设计, 研究一类非线性多智能体系统的事件触发全局鲁棒输出调节问题.
上述文献的分布式控制器虽然采用了事件触发机制进行设计, 但是所给的事件触发趋同算法依然依赖智能体间的连续信息传输. 触发函数对邻居智能体状态信息连续监测问题引起了研究人员的注意. 文献[18]利用基于反步法的分布式自适应输出反馈控制策略研究不确定异构线性多智能体系统的事件触发输出同步问题. 针对由一类高阶不确定非线性系统构成的无领导型异构多智能体系统, 文献[19]给出基于事件触发机制的分布式自适应趋同算法. 文献[20]分别对同构和异构线性多智能体系统的事件触发平均跟踪算法进行研究. 针对异构领导−跟随者型多智能体系统, 文献[21]分别给出基于模型和基于数据的事件触发趋同算法. 文献[22]基于动态事件触发机制, 对一般线性多智能体系统的编队包含控制问题进行研究. 针对拓扑为有向网络的不确定下三角非线性多智能体系统, 文献[23]利用神经网络设计分布式自适应异步事件触发趋同算法. 基于输出调节理论, 文献[24]研究异构线性多智能体系统的自适应事件触发输出趋同控制, 文献[25]研究一类异构非线性多智能体系统的分布式事件触发输出趋同控制问题, 文献[26]研究严格反馈非线性多智能体系统的半全局周期事件触发输出调节问题.
受上述文献启发, 本文研究异构不确定二阶非线性多智能体系统的事件触发状态趋同问题, 主要贡献有如下3点: 1)本文研究领导−跟随者型异构不确定多智能体系统的状态趋同问题, 不仅跟随智能体的动力学方程存在不确定参数, 领导智能体也存在不确定参数. 文献[10, 15−16, 24−26]中的领导智能体均为完全已知的, 并未考虑领导智能体存在不确定参数的情形. 2)本文基于邻居智能体的观测状态设计事件触发趋同算法, 由于对邻居智能体的状态进行观测, 避免了事件触发函数对邻居智能体的连续监测, 做到控制器与触发函数都不依赖智能体间的连续信息传输. 同样研究异构不确定二阶非线性多智能体系统事件触发控制的文献[9−10], 其事件触发函数需要对邻居智能体的状态进行连续监测. 3)本文不确定参数为矩阵形式而非向量形式, 不同于以往将矩阵转变为向量的处理方法, 本文直接利用矩阵迹的不等式对矩阵自适应参数估计的收敛性进行证明.
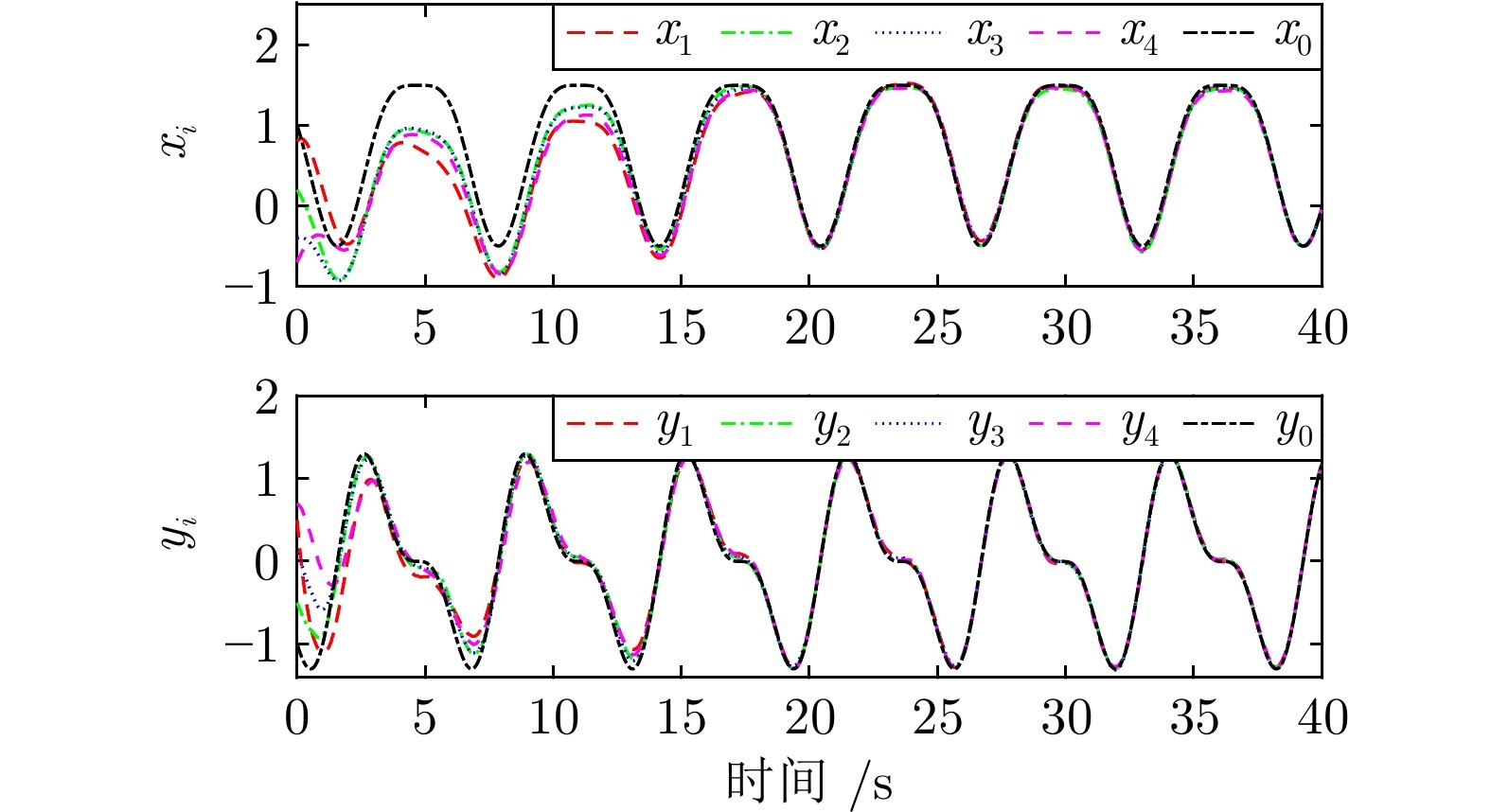
图 1 各智能体的状态轨迹

图 2 ||θ~i0||和θ~i的轨迹
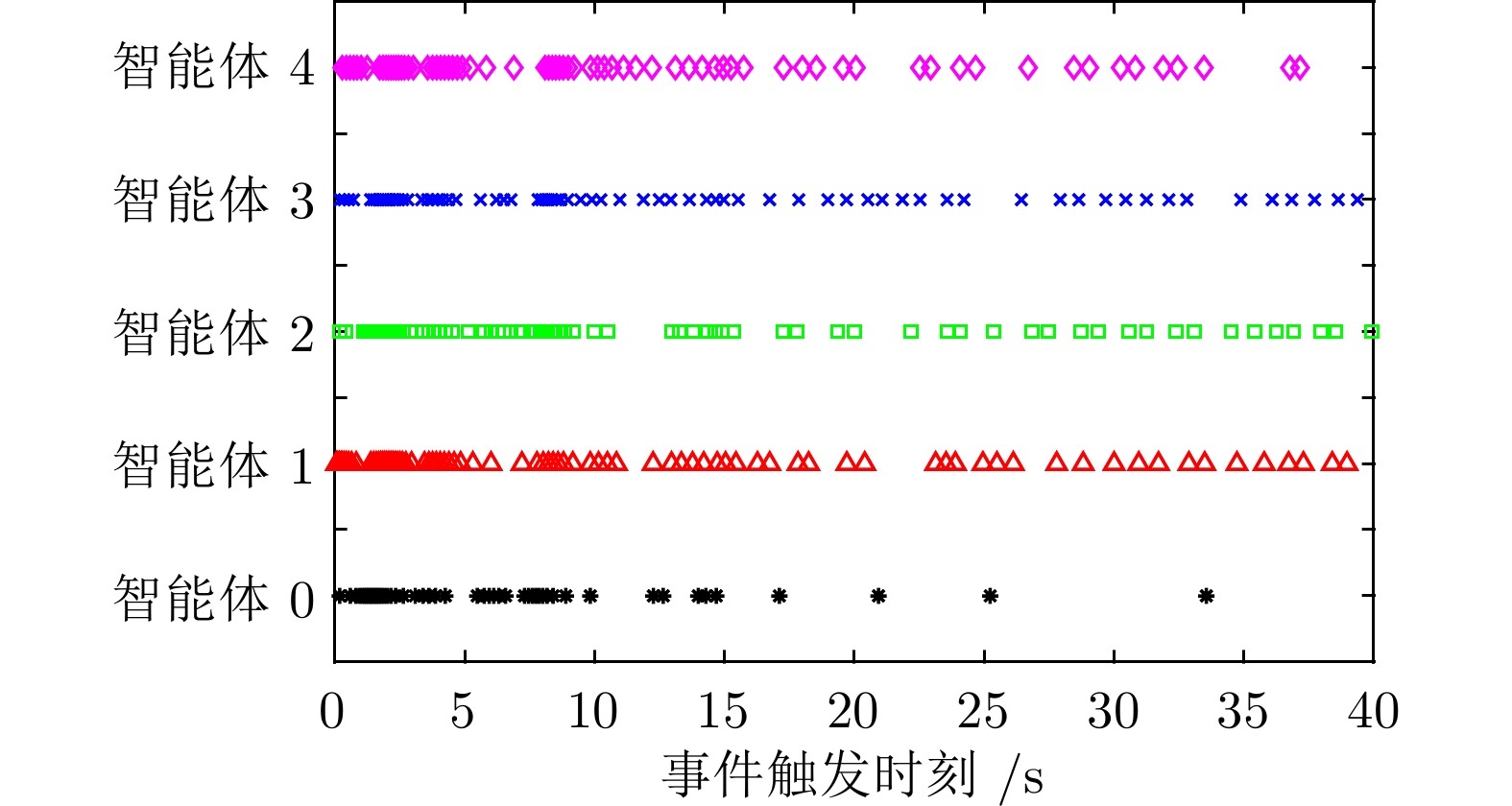
图 3 各智能体的事件触发时刻
本文基于参数估计与事件触发机制, 研究了异构不确定二阶非线性多智能体系统的状态趋同问题, 给出完全不依赖智能体间连续信息传输的事件触发趋同算法. 因为每个智能体均存在不确定参数, 在设计控制器前, 先设计观测器, 估计其不确定参数. 为使跟随智能体跟踪上领导智能体, 设计分布式参数观测器, 使每个跟随智能体可以渐近估计领导智能体不确定参数. 为使算法达到完全不依赖智能体间连续信息传输的目的, 每个智能体利用其邻居智能体发送的事件触发时刻采样信息, 对邻居智能体状态进行重构, 利用重构的状态信息设计控制器和事件触发函数. 进一步证明了所提事件触发趋同算法不存在芝诺现象. 最后, 通过一个多单摆系统验证了所提事件触发趋同算法的有效性, 同时对比组合测量事件触发算法, 本文所提算法可有效减少事件触发次数. 为简化反馈增益参数对拓扑网络全局信息的依赖, 未来可将现有工作推广到完全分布式事件触发状态趋同控制.
作者简介
李振兴
临沂大学自动化与电气工程学院副教授. 主要研究方向为多智能体系统控制. E-mail: lizhenxing@lyu.edu.cn
庄娇娇
临沂大学机械与车辆工程学院副教授. 主要研究方向为多智能体系统控制. 本文通信作者. E-mail: zhuangjiaojiao@lyu.edu.cn
杨成东
临沂大学信息科学与工程学院教授. 主要研究方向为复杂网络控制. E-mail: yangchengdong@lyu.edu.cn
邱建龙
临沂大学自动化与电气工程学院教授. 主要研究方向为物流系统优化, 复杂网络控制. E-mail: qiujianlong@lyu.edu.cn
曹进德
东南大学数学学院教授. 主要研究方向为复杂网络与复杂系统, 神经动力学与优化. E-mail: jdcao@seu.edu.cn
https://wap.sciencenet.cn/blog-3291369-1486317.html
上一篇:基于混合双端事件触发机制的协同控制策略研究
下一篇:基于自适应动态规划的量化通信下协同最优输出调节