博文
Biomimetics:美国麻省理工学院——一种两自由度动力踝足假体的设计、特性描述及初步评估
||
动力踝关节假体已被证明能改善截肢患者的行走经济性。目前所有市售的动力踝关节假体只能在有限范围内进行单自由度运动。美国麻省理工学院李萨·杨仿生研究中心Hsieh博士等人联合其他相关单位在Biomimetics 期刊发表了一篇文章,旨在开发并评估一种无束缚、自给自足、有动力的双自由度踝关节假体,用于水平地面行走,并可能有助于楼梯导航。该项目包括机械设计的整合,以确保在水平和垂直平面内的可控运动,以及能够承受体重并促进显著推离扭矩的强大传动系统。还包括紧凑电子系统的开发,该系统具有高能、高输出电池。控制系统旨在复制人类自然行走的动力学,在单侧截肢患者中进行水平地面行走的测试。本文深入探讨了机械设计、电子系统、控制策略以及假体的性能,为未来的研究提供了见解和方向。
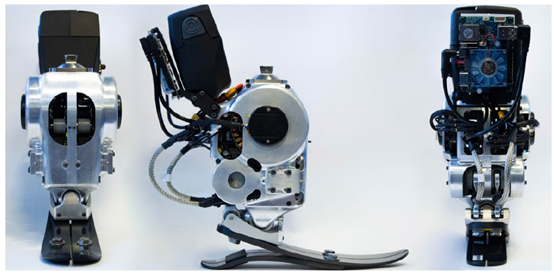
图1. 两自由度踝关节假体的概述,其设计用于无束缚的移动,为约75公斤的个体量身定制,适用于各种地形。
研究过程与结果
踝关节假体的执行器设计采用了两个无刷直流电机,形成了一个差动驱动系统。这种设置可以实现不同的运动:同步电机动作导致矢状平面的运动,而不同步电机动作则促进了额状平面和矢状平面的耦合运动。每个电机都与一个两级带式传动相连,连接到驱动足部的四杆机构上。两个阶段都使用了PowerGrip GT3定时带。第一级使用宽度为15毫米、节距为3毫米、齿数为73的带,第二级使用宽度为15毫米、节距为5毫米、齿数为40的带。带式张紧器的加入不仅是为了保持适当的皮带张力,以实现有效的动力传递,同时也简化装配过程。这种传动机制的基本要素如图2所示,展示了支撑假体运动能力的设计。
这项工作的成果之一是在紧凑的假体设计尺寸内成功整合了两组两级带式传动和一个四杆机构。设计挑战在于如何在不牺牲假体功能或耐用的前提下,将这些机械部件容纳在有限的空间内。两级带式传动的位置进行了战略性优化,以确保高效的动力传递,同时保持紧凑的外形。这种配置对于在各种行走场景下实现假体所需的扭矩和速度至关重要。将四杆机构纳入设计是一个关键的决定。这种机构能够在最小空间内将电机运动转化为所需的踝关节运动。性能测试表明,这种复杂的整合并未影响假体的功能。相反,它使该设备能够在矢状平面和额状平面提供响应和可控的运动,令人满意的扭矩控制是稳定性和舒适性的一个显著特征,在行走过程中表现尤为明显。
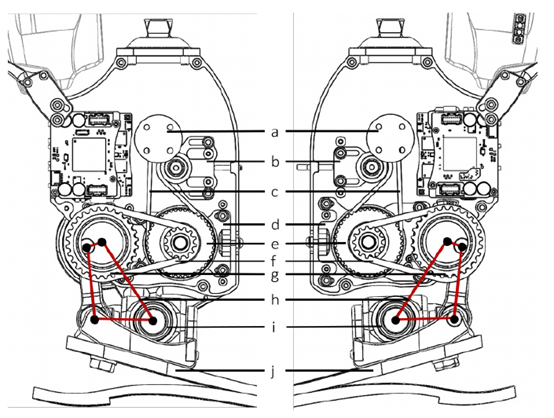
图2. 传动中的关键部件:(a) 用于安装电机的第一级输入滑轮 (12个齿);(b) 第一级皮带张紧器;(c) 第一级皮带 (3毫米节距,73个齿);(d) 第二级皮带张紧器;(e) 第一级至第二级的复合滑轮 (44个齿和13个齿);(f) 第二级皮带 (5毫米节距,40个齿);(g) 第二级输出滑轮 (28个齿),与四杆机构相连;(h) 驱动足部的虚拟四杆机构;(i) 两自由度关节;(j) 足部假体 (LP Vari-Flex足,奥索公司,德国弗雷兴)。
研究总结
该文所展示的两自由度踝关节假体在无束缚的外形下,初步展现出了复制人类自然行走的生物力学特性的良好能力。台式频率响应和阶跃输入测试证实,其扭矩控制带宽高达9.74赫兹,上升时间迅速,能够跟踪高达正常步态中常见的3-5赫兹范围的生物踝关节阻抗。对一名77公斤的受试者进行的初步水平地面行走试验表明,在体重作用下,矢状面扭矩跟踪误差的均方根误差低于7牛顿·米,表明精度足够。此外,多步试验显示传感器位置没有漂移,证实了定时带传动在负载下抗齿跳动的机械稳健性。这项研究为未来对额平面和矢状平面运动耦合动态的探索奠定了基础。我们从工作中获得的见解有助于推进假体技术的更广泛目标,最终旨在恢复下肢缺失者的行动能力并提高他们的生活质量。
原文出自Biomimetics 期刊:https://www.mdpi.com/2313-7673/9/2/76
期刊主页:https://www.mdpi.com/journal/biomimetics
Biomimetics 期刊介绍
主编:Stanislav N. Gorb, Kiel University, Germany
期刊致力于研究生物体的最基本方面及其特性向人类应用的转移。期刊旨在为材料科学、机械工程、纳米技术和生物医学领域的研究人员和专业人士提供一个平台,通过在工程系统、技术和生物医学中利用生物启发的设计,开发实现可持续创新的解决方案。
2023 Impact Factor:3.4
2023 CiteScore:3.5
Time to First Decision:19.5 Days
Acceptance to Publication:2.8 Days


https://wap.sciencenet.cn/blog-3516770-1474936.html
上一篇:吉林大学丁壮教授、徐小洪副教授团队——新城疫病毒致病机理研究进展 | Viruses
下一篇:Chemosensors 环境化学领域的“气敏卫士”:MOX 电阻式传感器研究全解析