博文
[转载]用于工业机器人关节跨设备故障检测的混合学习模型
||
用于工业机器人关节跨设备故障检测的混合学习模型
肖雷,赵海龙,吴逊,王钧,周其洪
(东华大学 机械工程学院,上海 201620)
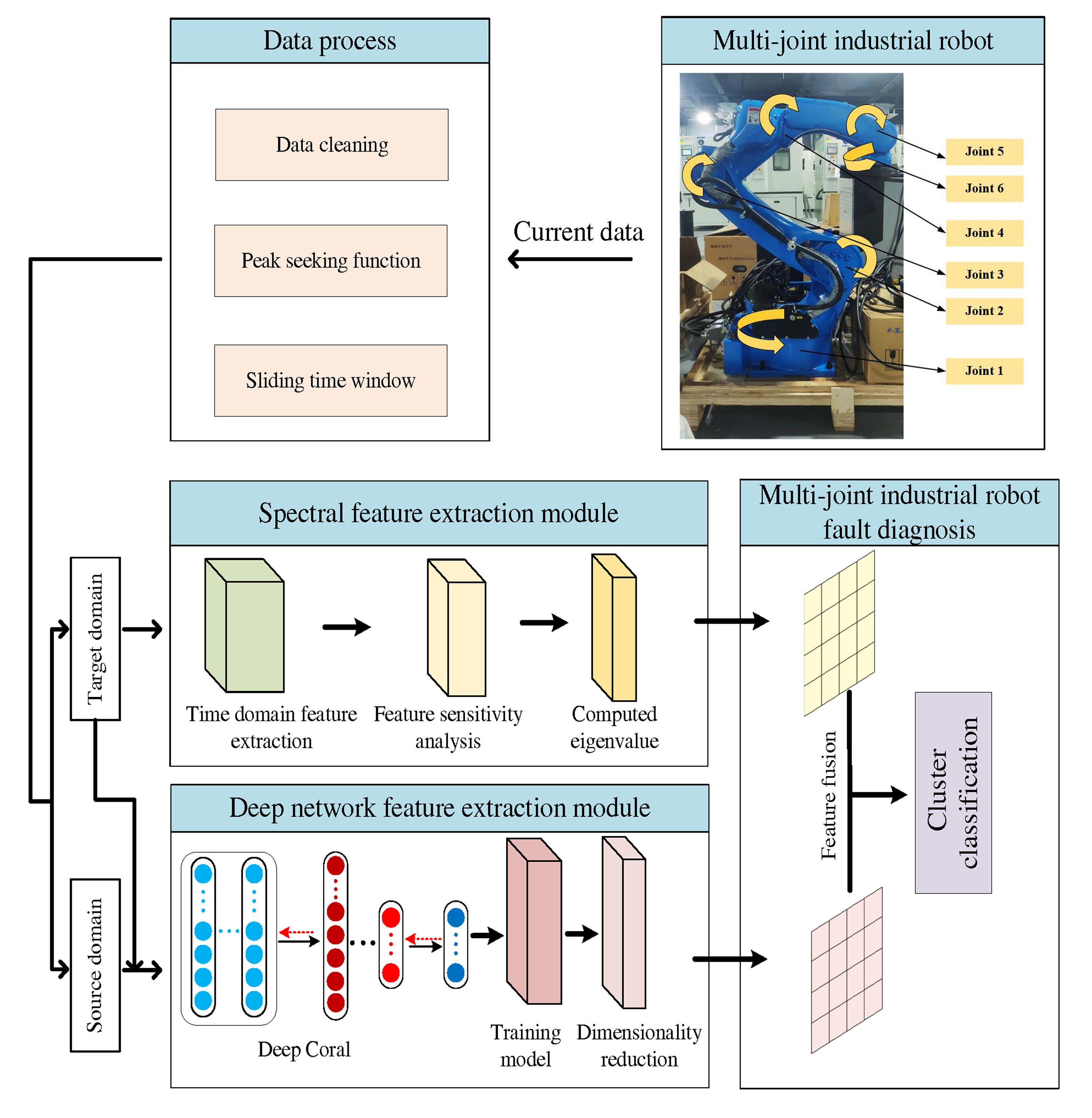
摘要:工业机器人被广泛应用于提高生产效率,但随着其服役时间的延长,关节故障的风险也在不断增加。然而,末端执行器的运动异常可能源自末端执行器本身的故障,或者是由于其他关节的运动传播导致的。此外,用于故障检测的故障样本稀缺,这给故障诊断带来了巨大挑战。安装额外的加速度计以实现更精确的故障诊断可能会增加系统的复杂性和成本。为应对这些挑战,本研究利用数据采集的便利性,分析多关节工业机器人的电流数据。提出了一种用于跨设备故障检测的混合学习方法,以识别故障关节。该方法整合了深度网络和频谱分析的特征,从其他机器人和目标机器人中提取知识。采用基于融合特征的无监督模型来评估关节状态。通过消融实验和对比试验验证了所提方法的有效性。结果表明:该方法能够准确检测异常关节,且不会出现误判。
关键词:故障检测,多关节工业机器人,混合学习方法,融合特征,电流数据
扫二维码浏览全文

Cite this article: Xiao, L., Zhao, H., Wu, X. et al. Hybrid Learning Model for Cross-Device Fault Detection of Industrial Robot Joints. J. Shanghai Jiaotong Univ. (Sci.) (2025). https://doi.org/10.1007/s12204-025-2843-3
https://wap.sciencenet.cn/blog-45888-1501084.html
上一篇:[转载]无人机辅助异构边缘计算网络的资源分配和轨迹优化
下一篇:[转载]用时间卷积网络预测关键蛋白质的深度学习框架
扫一扫,分享此博文