博文
[转载]基于近端策略优化的露天矿山交叉路口的异构自动驾驶车队协调控制方法
||
基于近端策略优化的露天矿山交叉路口的异构自动驾驶车队协调控制方法
王志超,杨珏,刘磊
(北京科技大学 机械工程学院,北京 100083)
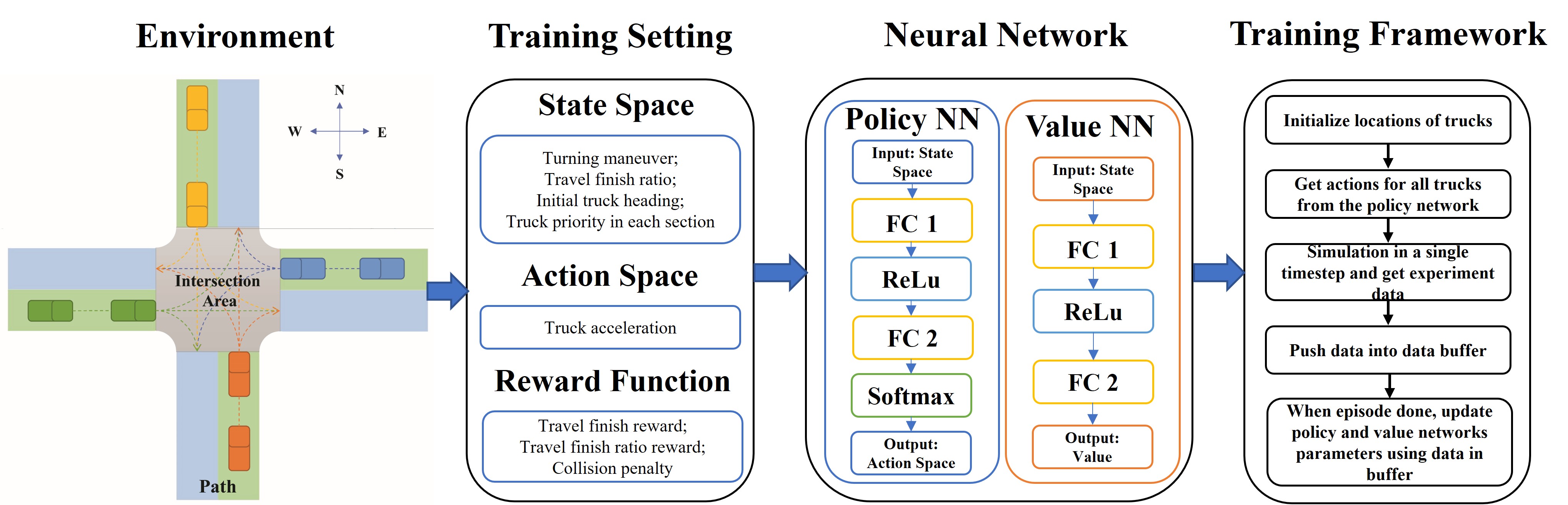
摘要:针对露天矿异构自动驾驶车队的交叉口协调控制问题,基于剪切近端策略优化(clipped-PPO),开发了一种强化学习方法,称为多智能体动作-评价近端策略优化(AC-PPO)。该方法通过计算交叉口区域内所有卡车的优先级并将其添加到卡车的状态空间中,以车队通过交叉路口区域的完成时间最小化为目标,解决了交叉路口处的异构卡车车队的运行控制问题。此外,还通过创建两个独立的网络来更新与策略网络和价值函数网络相关的参数,从而增强了clipped-PPO 的参数更新方法。最终通过仿真实验证明:我们的训练模型能够适应各种情况,并且AC-PPO可以使用更少的网络参数得到优于clipped-PPO的性能。
关键词:集中控制,学习控制系统,采矿业,交通运输控制
点击分享码全文pdf浏览:https://rdcu.be/egtrC
Wang, Z., Yang, J. & Liu, L. Coordination Scheme for Autonomous Heterogeneous Mining Fleets at Open Pit Mine Intersections by Proximal Policy Optimization. J. Shanghai Jiaotong Univ. (Sci.) (2025). https://doi.org/10.1007/s12204-025-2814-8
《上海交通大学学报(英文版)》是由教育部主管、上海交通大学主办的自然科学综合性学术期刊,被 EI、Scopus等检索系统收录。主要刊登反映基础理论和工程领域实验研究的最新成果,如电子工程和自动化、计算机和通信工程、船舶海洋和建筑工程、材料科学与工程以及生物医学工程等。从 2021 年开始,《上海交通大学学报(英文版)》主要刊登医工交叉研究和人工智能及其在工程中的应用成果。
英文版主页:https://xuebao.sjtu.edu.cn/sjtu_en/EN/1007-1172/home.shtml
英文版 on Springer:https://link.springer.com/journal/12204
https://wap.sciencenet.cn/blog-45888-1480766.html
上一篇:[转载]基于图论特征和机器学习的精神分裂症识别研究
下一篇:[转载]基于精细引导掩码提取的自适应遮挡人脸识别特征融合网络