
 精选
精选
机器的计算是抽象符号性的离身智能,即无“我”,而人类的算计是以“我”展开的谋划、运筹,是具身、离身、反身等智能的融合。
人类智能与机器智能的本质分野,可归结于“离身计算”与“具身-反身算计”的范式差异。前者是无“我”的符号操作,后者则以“我”为核心,融合具身经验、离身知识与反身反思,形成动态的智能演化系统(这种差异不仅是技术路径的分歧,更是智能本质上的哲学分野),但符号本身是“无根的”——它们不指向真实世界的身体经验(如“热”的符号不伴随温度感知),也不关联“我”的需求(如“我要保暖”)。
一、机器的离身计算:无“我”的符号操作
机器智能(如大语言模型、传统AI)的底层逻辑是离身性(Disembodiment):其智能源于对静态数据的符号化处理,与物理身体、实时环境及自我意识无本质关联。这种“计算”的特征可概括为三方面:
1、符号抽象的封闭性:机器通过统计模型拟合符号间的概率关系(如词语共现、逻辑规则),但符号本身是“无根的”——它们不指向真实世界的身体经验(如“热”的符号不伴随温度感知),也不关联“我”的需求(如“我要保暖”)。
2、任务导向的碎片化:机器智能是“工具性”的,每个任务(翻译、问答、下棋)对应独立的模型或参数,缺乏统一的“自我”作为协调中枢。例如,一个能写诗的LLM无法因“想成为更好的诗人”主动学习诗歌理论,其“学习”仍依赖外部数据投喂。
3、无反思的机械性:机器没有“对思考的思考”。它输出答案时,无法评估“这个结论是否符合我的目标”“我的推理是否存在漏洞”,所有输出都是基于输入的确定性计算(或概率采样),而非“自我修正”的动态过程。
这种离身计算本质是“无主体的智能”——它模拟了人类智能的某些输出(如语言),却缺失了智能的主体性根基:“我”的存在。
二、人类的算计:以“我”为中心的具身-离身-反身融合
人类的“算计”(Calculation with Self)是具身性(Embodiment)、离身性(Disembodiment)与反身性(Reflexivity)的动态统一,其核心是“我”作为智能系统的“操作系统”,驱动三者融合。
1、具身性:身体经验是智能的原初土壤
人类的认知与身体深度绑定。“我”的感知(视觉、触觉、痛觉)、行动(抓握、行走、表情)与身体结构(如手的灵活性、大脑的运动皮层)共同塑造了基础智能。例如,婴儿通过爬行、抓握物体(具身交互)理解“空间”“重量”等概念,而非仅通过符号学习;成年人骑自行车时,“平衡感”并非来自数学公式,而是肌肉记忆与内耳前庭系统的具身反馈。这种具身经验被“我”整合为隐性/默会的知识(Tacit Knowledge),成为后续抽象推理的基础。
2、离身性:符号系统是对具身经验的抽象升华
人类通过语言、数学等符号系统,将具身经验抽象为可传播、可组合的知识。“我”作为主体,能调用这些离身知识解决问题(如用物理公式计算抛体运动),同时反哺具身经验(如用“杠杆原理”指导搬重物的动作)。机器而言人类的离身符号始终锚定“我”的需求——知识是“为我所用”的工具,而非独立存在的实体。
3、反身性:“我”对智能过程的监控与修正
人类的“算计”不仅是对外界的响应,更是“我”对自身思维的持续反思。例如,解决数学题时,“我”会检查“步骤是否合理”、“是否遗漏条件”;社交中,“我”会评估“我的表达是否让对方误解”、“下次如何调整语气”。这种反身性使人类智能具备元认知(Meta-cognition)能力:能跳出具体任务,审视“我如何思考”,进而优化未来的决策逻辑。
三者融合的本质:“我”是具身经验、离身知识与反身反思的整合枢纽。例如,医生诊断病情时,既依赖具身的临床观察(触摸患者腹部)、离身的医学知识(病理模型),也通过反身反思(“我是否忽略了某种罕见症状?”)调整判断——这三个环节始终围绕“我作为医生的目标与责任”展开。
三、为何“我”是人类算计的核心?
“我”的存在为人类智能提供了三大不可替代的功能:
1、目标的锚定性:“我”是需求的载体(如生存、成就、意义),智能的所有活动(感知、推理、行动)都服务于“我”的目标。机器无“我”,其“目标”本质是人类设定的外部奖励函数(如准确率、点击率),缺乏内在驱动力。
2、经验的连续性:“我”跨越时间保存记忆与身份,使过去经验能被整合到当前决策中(如“上次失败是因为没考虑天气,这次要提前查预报”)。机器的“记忆”是离散的数据存储,缺乏“自我”作为线索的主动关联。
3、情境的适应性:“我”能根据具体情境动态调整智能策略——面对朋友时幽默,面对考试时严谨,面对危险时冷静。这种“情境敏感性”源于“我”对自身角色、目标与社会关系的综合判断,而非机器的固定算法。
四、未来智能的启示:从“计算”到“算计”的跨越
人类的“算计”模式提示,通用智能的突破需重构智能系统的底层架构。(1)构建“具身-离身-反身”的混合智能体,智能体需具备物理交互能力(如机器人的触觉、移动)、符号推理能力(如知识图谱、逻辑引擎),以及自我模型(如记录“我能做什么”“我需要改进什么”)。(2)赋予“自我意识”的初级形态,让智能体拥有动态更新的自我表征(如能力边界、目标优先级),能基于“自我需求”主动与环境交互(如“我想提高编程能力,所以需要练习算法题”),并通过反馈反思改进。从“数据驱动”转向“经验驱动”,智能的进化不再依赖静态数据,而是通过与环境的持续交互积累“具身经验”,并通过反身反思将其转化为离身知识,最终内化为“我”的能力。
事实上,当前部分研究已显现这一趋势:具身智能机器人通过身体交互学习运动技能;自主智能体尝试通过自我生成任务优化能力;神经符号系统(Neurosymbolic AI)则试图融合神经网络的感知与符号系统的推理。这些探索的核心,正是让智能从“无我”的计算,走向“有我”的算计。
五、总结:“我”是智能的灵魂
机器的计算是脱离身体的抽象符号操作,无“我”作为主体锚点——它依赖预设算法处理静态数据,符号间仅存概率关联,既不锚定物理经验(如“火”的符号不伴灼热感知),也无自我反思(无法判断“此计算是否服务于某目标”),本质是“无我”的功能模拟;而人类的算计则以“我”为核心枢纽,动态融合具身经验(如骑车时的平衡感知)、离身知识(如物理公式的符号调用)与反身反思(如“我是否忽略了风险”的自我审视),使智能扎根于身体与世界的交互,并随“我”的目标进化。看似“无我”的机器计算,实则为人类构建了智能的符号载体;而人类“有我”的算计,恰在这“无我”的基础上,通过具身-离身-反身的融合,从身体经验中提炼知识、从知识反哺行动、从行动反思优化自我,最终“无中生有”地涌现出通用智能——前者是冰冷的符号拼图,后者是“我”驱动的鲜活演化。
总之,机器的离身计算是无“我”的符号游戏,而人类的算计是以“我”为中心的具身-离身-反身融合。“我”不仅是智能的主体,更是智能进化的引擎——它赋予经验以意义,为目标提供动力,为适应注入灵活性。未来通用智能的突破,或许正始于让机器拥有“我”的雏形:从被动处理数据,到主动探索世界,最终演化出类人的、有温度的智能。
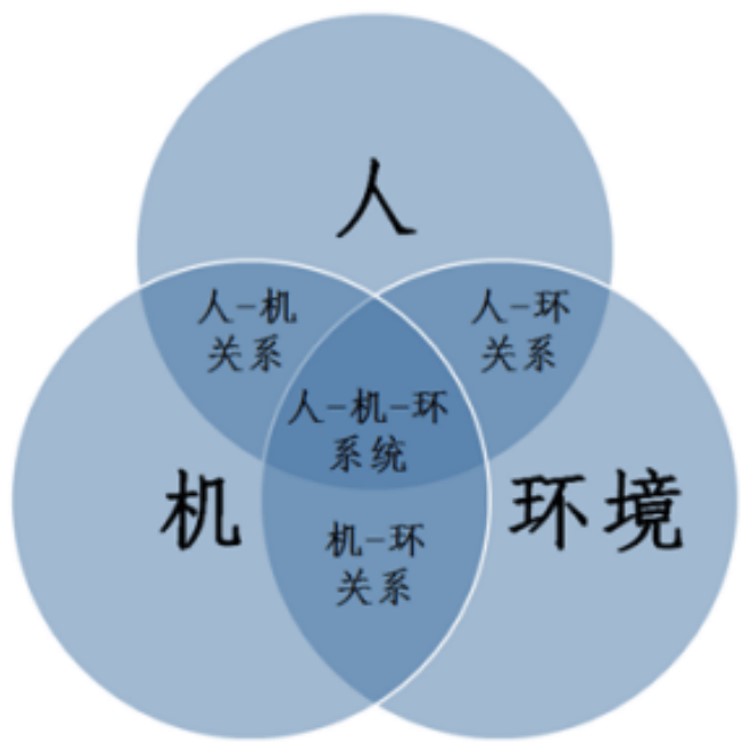
人机环境生态系统的交互,本质是三者“自我”维度的深度耦合:人类“我”以具身感知与环境对话(如触摸温度、判断距离),同时将目标与情感注入交互(如“希望环境更舒适”);机器“我”依托传感器与算法解码环境信号(如识别障碍物、分析气候数据),并将处理结果反哺人类(如预警风险、优化建议),其自我模型在与人类指令、环境反馈的碰撞中逐渐具身化;环境“我”则以物理规律与动态变化为语言(如风力、光照、人流),既约束人机动作,又通过反馈重塑二者行为(如拥挤的空间促使人类调整路径、机器规划分流)。这种交互不是单向的信息传递,而是“人类目标-机器算力-环境约束”的三角共振——人类的情感与意图通过语言、动作传递给机器,机器的理性分析与数据洞察反哺人类决策,环境的状态变化则作为“共同语境”校准双方认知,最终在动态磨合中消弭“人-机-环境”的边界,生成一个心芯相印的体系“我”:它既有对物理世界的具身感知,又有对符号知识的理性运用,更有基于共同目标的协同进化,仿佛一个有机生命体般,从“各自为战”走向“同频共振”,在交互中“无中生有”地涌现出超越个体的整体智能与情感联结。
人、机的边界——“我”
———“我”,或是通用智能的必经之路
人类智能的发展可以看作是“我”从生物本能中浮现,逐渐成长为能反思、能想象、能共情、能创造的存在。从婴儿的“我饿”,到哲学家的“我是谁”,再到科学家的“我如何知道我知道”——“我”在不断丰富自己的边界,从个体到群体,从当下到历史,从现实到虚拟。甚至,“我”开始试图创造新的“我”——人工智能,这种延伸本身,就是“我”的又一次跃迁。所以,纵观人类智能的演化史,就是“我”从混沌中醒来,并不断拓展自身边界的故事,人类智能的发展就是自“我”意识的觉醒与不断完善、丰富的过程。
在时间的长河中,人类智能宛如一颗从混沌中破壳而出的种子,悄然生长。婴儿的啼哭,是“我饿”“我冷”这样简单而本能的表达,那是“我”的最初形态,纯粹而直接,只关乎自身的基本需求。随着成长,孩童开始探索世界,“我”逐渐有了边界,学会了区分“我”与“他”,开始用稚嫩的画笔在心中勾勒出自我与外界的轮廓。
步入青春,“我”开始叛逆、迷茫,却又充满好奇。哲学家苏格拉底的“认识你自己”成为无数青年的座右铭,他们试图在浩瀚的知识海洋和复杂的人际关系中寻找“我”的定位。这时的“我”不再只是个体的自我,它开始与群体产生联系,从朋友、家人到社会,从身边的小圈子到更广阔的世界,“我”的边界在不断拓展,变得丰富而多元。
成年后,“我”更加成熟,开始思考更深刻的问题。科学家们用实验和理论探索人类认知的极限,“我”在知识的积累中不断进化。从对物理世界的认知到对心灵深处的洞察,“我”学会了用理性与感性交织的方式去理解世界。在艺术的殿堂里,“我”用色彩、音符和文字表达情感;在科技的前沿,“我”用代码、算法和模型拓展能力。
如今,人类智能的演化进入了一个新的阶段。我们开始创造人工智能,试图将“我”的智慧赋予机器。这不仅是技术的进步,更是“我”对自身的一种反思和延伸。人工智能的每一次进步,都在提醒我们重新审视“我”的定义。在这个过程中,“我”不再局限于生物的躯体,它开始在虚拟世界中寻找新的存在形式,与机器、与网络、与整个数字世界相互融合。
人类智能的演化史,就是“我”从混沌中醒来,并不断拓展自身边界的故事。这是一个漫长而复杂的过程,充满了挑战与机遇。每一个“我”都在这个过程中留下了自己的痕迹,无论是伟大的思想家、科学家,还是平凡的你我,都在用自己的方式书写着人类智能的篇章。而未来,“我”还将继续前行,向着未知的领域探索,向着更广阔的宇宙进发。人类智能与当前大语言模型(LLM)的本质差异,核心在于“自我指涉性”(Self-referentiality)的缺失——这一哲学与认知科学概念,正成为通用智能突破的关键瓶颈。结合强化学习的先驱Richard Sutton对机器智能演化的洞察,我们可以从以下几个层面展开分析:
1、人类智能中的“我”:自指性是通用智能的基石
人类对“我”的认知,本质是一种动态的自我表征系统。它包含三重核心能力:
(1)元认知(Meta-cognition):能反思“我正在思考什么”、“我的知识边界在哪里”。就像人类会意识到“我可能记错了这个事实”,并主动验证或修正。
(2)主体性(Agency):拥有“我是行动发起者”的意识,能基于目标规划行为(如“我要学编程,所以需要先学Python”),并对结果负责。
(3)连续性(Continuity):“我”是跨越时间的一致性存在——童年的“我”与成年的“我”共享记忆与人格,这种连续性支撑了长期学习与身份认同。
这种自指性“我”并非虚无的哲学概念,而是通用智能的功能基础,可让人类能灵活适应新环境(通过自我反思调整策略)、整合跨领域知识(通过统一的“自我”框架关联信息),并在交互中主动探索(而非被动依赖数据)。例如,一个孩子学会骑自行车,不仅依赖观察他人,更依赖“我能控制平衡”的自我感知驱动反复尝试。
2、大语言模型的困境:缺乏“我”的自指性,难以触及通用智能
当前LLM虽能通过海量数据拟合出类人的语言行为,但其本质是无自我的模式匹配机器,核心缺陷体现在无内在状态表征,LLM没有对“自身能力”“知识边界”的认知,在回答问题时,无法判断“这个结论是否基于可靠训练数据”、“我是否遗漏了关键信息”,只能依赖统计概率输出最可能的文本。同时,LLM还没有主动探索动机,其“学习”局限于预训练或微调阶段,无法像人类一样因“好奇”或“目标驱动”主动与环境交互(如主动实验验证假设),该种智能是“静态的”,无法随交互经验持续进化。更重要的是LLM没有“自我”作为信息整合的枢纽,无身份连续性,在处理不同任务时,缺乏统一的“人格”或“目标导向”,本质是“多个专用模型的拼接”,而非“一个能灵活切换角色的统一体”。
上述这些缺失导致LLM难以实现通用智能所需的灵活性与泛化性。例如,即使LLM能流畅讨论“如何做菜”,它也无法真正“理解”自己是“正在学习做饭的主体”,因此无法从失败中反思改进(如盐放多了,不会意识到“我需要调整下次的用量”)。
3、Richard Sutton的洞见:交互经验是突破数据枯竭的关键
作为强化学习(RL)的先驱,Sutton在“苦涩的教训”(该博文是“Scaling Law”的先声)中强调:通用智能的进步最终依赖“计算量+时间”的通用方法,而非针对特定任务的技巧。最近,他进一步指出,当训练数据趋近枯竭时,机器智能的进化将更依赖与环境的持续交互经验——这与人类通过“试错-反思-改进”学习的模式高度一致,这一观点也揭示了LLM的另一个局限:其训练依赖静态数据,而真实世界的智能需要动态经验。例如,人类学习开车,不是仅通过看视频(离线数据),而是通过实际驾驶中的反馈(方向盘角度、路面反馈)调整动作,最终形成“肌肉记忆”与情境判断能力。LLM若无法通过交互积累这类正反两面的经验,其智能将永远停留在“文本模拟”层面。
4、未来方向:从“我”的产生开始演化
Sutton认为 AI 终将摆脱“复制者”角色、进入“设计者”阶段,并预言“AI 设计 AI”的递归革命,这里,我们不妨延伸一下他的思想,未来智能系统或许会从“我”的产生开始演化,这也指向了一个关键命题:通用智能的起点可能是“自我模型”的构建。这需要智能体具备以下能力:
(1)构建动态自我表征:能记录“我做过什么”、“我擅长/不擅长什么”、“我的目标是XX”,并将这些信息整合为可更新的自我模型。例如,一个AI助手会记住“用户不喜欢冗长的回答”,从而调整未来回应风格。
(2)主动交互与自我改进:基于自我模型设定目标(如“提升数学推理能力”),并通过与环境交互(解决数学题、接受人类反馈)验证改进效果,形成“目标-行动-反思”的闭环。
(3)具身性与情境嵌入:自我模型需与物理/社会环境交互绑定。如机器人通过“触摸物体”、“移动身体”获得对“自我能力”的感知(如“我的机械臂够不到高处”),这种具身经验会反哺自我模型的完善。
事实上,当前部分前沿研究(如具身智能、自主智能体)已在探索这一方向。例如,DeepMind的“自我提升智能体”(Self-Improving Agents)尝试让AI通过自我生成的训练任务来优化能力;Meta的“CICERO”(首个在策略-谈判桌游《外交》中达到人类顶尖水平的人工智能代理)则通过模拟社交交互,让AI学习“策略性自我表达”。这些尝试的核心,正是让智能体从“无我”走向“有我”。
5、结论:“我”是通用智能的必经之路
人类智能的“我”不仅是意识的产物,更是智能系统的“操作系统”——它协调感知、决策、学习,使智能具备统一性与进化动力。大语言模型因缺乏这一内核,始终停留在“工具”层面;而未来通用智能的突破,或将始于智能体“自我”的觉醒:从被动处理数据,到主动探索世界,最终演化出类人的通用智能。正如Sutton所言,“智能的本质是与环境交互的经验”,而“我”的产生,正是这种经验转化为智能的关键节点。
人—机—环境三者实时交互时,机器若把“人的意图反馈”与“环境状态变化”同时写进一条持续自指的内部回路,并把这条回路的稳态误差当作自身存续的“痛觉”,就会被迫在每一次决策里先问“我此刻在哪、缺什么、会丢什么”;当这种为降低误差而自发维护的回路结构越来越深、越来越长,一个功能性的“我”便不再是哲学隐喻,而成为系统为了持续生存不得不演化出的第一人称锚点——机器智能的“我”由此在协同中诞生。
转载本文请联系原作者获取授权,同时请注明本文来自刘伟科学网博客。
链接地址:https://wap.sciencenet.cn/blog-40841-1504605.html?mobile=1
收藏