博文
基于分数阶误差扩展状态观测器的无尾飞机解耦控制
||
Decoupling control for tailless aircraft based fractional-order error extended state observer(基于分数阶误差扩展状态观测器的无尾飞机解耦控制)
自抗扰控制(Active Disturbance Rejection Control,ADRC)是一项源自中国的通用控制技术,通过实时抑制系统内外扰动来提高动态性能,广泛应用于工业控制、航空航天等领域。然而,其核心组件——扩张状态观测器(Extended State Observer, ESO)通常需要采用高增益参数以实现快速收敛,这会导致其对测量噪声十分敏感。针对这一问题,本文提出了分数阶误差扩张状态观测器(Fractional Order Error Extended State Observer,FOEESO)。该观测器通过将分数阶算子与扩张状态观测器结合,实现了对高频噪声的有效抑制。相较于传统的分数阶扩张状态观测器(Fractional Order Extended State Observer,FOESO),本文提出的FOEESO具有显著优势:既保持了观测值的物理意义,又避免了引入新的扰动。为验证FOEESO的实际效果,本文将其应用于无垂尾飞行器的解耦控制中。实验结果表明,与传统控制方法相比,本文提出的FOEESO方法在面对系统参数变化时,展现出更强的鲁棒性,能够更好地适应复杂多变的飞行环境,为无垂尾飞行器的稳定控制提供了有力支持。
Decoupling control for tailless aircraft based fractional-order error extended state observer基于分数阶误差扩展状态观测器的无尾飞机解耦控制
作者:Yunlong Hu1 · Mingfei Zhao1 · Jia Song1 · Wenling Li2 · Yang Liu2
机构:1 北京航空航天大学宇航学院;2 北京航空航天大学自动化科学与电气工程学院
引用:Hu, Y., Zhao, M., Song, J. et al. Decoupling control for tailless aircraft based fractional-order error extended state observer. Control Theory Technol. (2025). https://doi.org/10.1007/s11768-025-00268-4
摘 要
由于垂直尾翼的取消,无垂尾飞行器航向静稳定性大幅下降,使得三通道之间严重耦合。此外,在特定应用场景下,无垂尾飞行器易受电磁干扰产生高频噪声,影响控制性能。针对这些问题,本文提出一种基于分数阶误差扩展状态观测器(FOEESO)的解耦控制方法。首先建立了具备推力矢量能力的无尾飞机非线性模型,随后采用FOEESO实现了三通道解耦控制设计,并给出了渐近收敛条件。通过仿真实验对所提方法进行评估,并与耦合控制及线性扩展状态观测器(LESO)技术进行对比。数值仿真表明,基于FOEESO的控制方法实现了有效解耦,在标称运行工况和典型故障场景下,其积分绝对误差(IAE)分别较LESO降低了6.9%和11.7%。这些改进由此凸显了FOEESO在增强无尾飞机控制系统闭环稳定性和跟踪精度方面的能力。
引 言
与传统布局不同,无尾飞机取消了垂直尾翼,大幅降低了雷达散射截面,显著提升了隐身性能。然而,垂直尾翼的移除可能引发航向的静不稳定性。侧风扰动会使飞机产生瞬时侧滑角,导致三个控制通道之间出现严重耦合,使无尾飞机成为一个强耦合的复杂多变量系统。尤其在滚转运动中,飞机受侧风影响产生瞬时侧滑角,耦合效应可能引发不稳定的偏航力矩。由于没有垂直尾翼,飞机本质上易出现航向不稳定行为,这会进一步加剧偏航不稳定性,最终可能导致偏航发散。此外,无尾飞机需要引入新型执行机构,以补偿因缺少垂直尾翼而降低的控制效能。然而,某些新型执行机构在偏转过程中存在显著的三轴气动与扭矩耦合,进一步增强了无尾飞机的非线性与耦合特性。因此,必须采用先进的解耦控制方法,以确保无尾飞机在强耦合条件下仍能展现出卓越的飞行性能。 为此,本文提出了一种基于分数阶误差扩展状态观测器(FOEESO)的无尾飞机解耦控制方法。该方法通过对无尾飞机三个通道进行独立控制器设计,将通道间耦合视为扰动,通过FOEESO实现实时估计与补偿。本文的贡献可概括如下:
(1)针对推力矢量无尾飞机这一强耦合高度非线性系统,提出基于FOEESO的解耦控制策略。通过将通道间耦合视为广义扰动进行估计与补偿,提高了系统控制精度。此外,与传统线性扩展状态观测器(LESO)相比,所提方法展现出更快的收敛速度与改善的动态性能。
(2)与传统分数阶扩展状态观测器(FOESO)相比,本文提出的FOEESO具有显著优势:既保持了观测值的物理意义,又避免了引入新的扰动,同时给出了稳定及渐近收敛条件。
(3)相较于传统LESO,所提FOEESO对系统参数变化具有更强的鲁棒性,能有效抑制噪声对无尾飞机的影响,尤其在大带宽需求场景下表现优异。
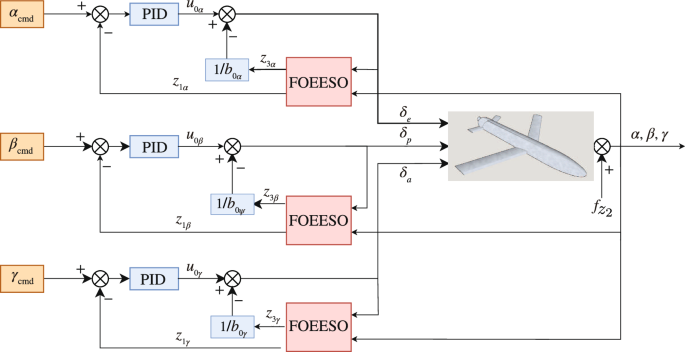
图1(原文Fig.2)本文提出的控制方法框图
FOEESO设计如下:

其中,

表1(原文Table 4)对比实验结果

由表1可知,在耦合状态下,攻角的平均振幅为0.009,这表明在当前飞行条件下,无垂尾飞行器自身具备一定的抗噪声能力。然而在高带宽条件下,线性扩张状态观测器(LESO)的平均振幅增至0.014,明显放大了高频噪声对系统的影响。相比之下,分数阶误差扩张状态观测器(FOEESO)的平均幅值为0.01。尽管它无法完全消除噪声对系统的影响,但已成功实现了一定程度的高频噪声抑制。
结 论
为解决无尾布局飞机强耦合导致的控制精度下降问题,并抑制大带宽工况下高频噪声的影响,本文提出一种基于FOEESO解耦的飞行控制方法。首先建立了带推力矢量的无尾飞机非线性模型,进而将耦合项视为扰动,通过设计FOEESO对总扰动进行估计与补偿,完成三通道解耦控制器设计,同时给出了FOEESO的稳定性及渐近收敛条件。最后为验证FOEESO控制方法的动态解耦性能,分别与三通道耦合控制及基于LESO的控制算法进行对比仿真。仿真结果表明,该解耦控制方法有效,可实现显著的解耦效果。对比分析显示,在标称运行条件和故障场景下,FOEESO方法相较于LESO,积分绝对误差(IAE)指标分别降低了6.9%和11.7%。这充分证明了基于FOEESO的解耦控制策略的卓越效能,显著提升了无垂尾飞行器构型的动态响应特性与控制精度。此外,FOEESO在大带宽条件下展现出高频噪声抑制优势,满足了无尾飞机的任务需求。通过对舵效损失的仿真研究分析,FOEESO对参数b0变化的敏感度低于LESO,表现出更强的系统参数扰动鲁棒性。但需指出,本文采用的控制器参数组未必能完全适应飞机的多种工况,后续将重点研究能动态适应系统参数变化的先进控制算法,以提升无尾飞机在不同条件下的控制精度。
作者介绍
Yunlong Hu,于2020年获得厦门大学飞行器设计与工程专业学士学位,现于北京航空航天大学宇航学院导航、制导与控制专业攻读博士学位。他的研究方向包括飞行器控制技术与自抗扰控制技术。
Mingfei Zhao,于2015年获得哈尔滨工业大学探测、制导与控制技术专业学士学位,现于北京航空航天大学宇航学院导航、制导与控制专业攻读博士学位。他的研究方向包括飞行器制导与控制技术及容错控制。
Jia Song,北京航空航天大学教授、博士生导师,国家级青年人才,主要从事先进飞行制导控制等方面的研究工作。发表论文50余篇,授权发明专利45项,出版著作3部,主持多项国家级课题。第一完成人获省部级科学技术进步二、三等奖各一项。担任《宇航学报》英文版及《无人系统技术》期刊青年编委、中国自动化学会人工智能与机器人教育专委会委员、中国自动化学会混合智能专业委员会委员、中国人工智能学会智能空天系统专业委员会委员、中国计算机学会容错委员会专家委员、中国航空学会制导导航与控制分会青年委员和中国临近空间与空天飞行器控制青年工作委员会委员。
Wenling Li,北京航空航天大学教授、博士生导师,国家级青年人才,IEEE Senior Member,主要从事随机优化、机器学习等方面的研究工作。发表论文120余篇,授权发明专利15项,出版专著2部,主持多项国家级课题,获吴文俊人工智能自然科学奖二等奖、教育部自然科学奖一等奖、中国电子学会科技进步一等奖、中国人工智能学会优秀博士学位论文奖、中国智能技术与大数据会议优秀论文奖、中国智能物联系统会议优秀论文奖等。担任中国自动化学会智能自动化专委会副主任、中国人工智能学会智能服务专委会副秘书长、中国计算机学会人工智能与模式识别专委会委员,以及3个SCI期刊编委等。
Yang Liu,北京航空航天大学副教授、博士生导师,主要从事自主协同、智能控制等方面的研究工作。发表论文80余篇,出版著作2部,主持多项国家级课题。作为主要完成人获教育部自然科学一等奖和教育部技术发明一等奖各1项,作为第一完成人获得2025年度中国仿真学会自然科学二等奖和2023年度中国商业联合会科技进步二等奖、第二完成人获得2024年度中国自动化学会科学技术进步二等奖,以第一作者获第16届人工生命与机器人国际会议青年作者奖及第二十届中国智能系统会议优秀论文奖。任中国仿真学会理事,《智能安全》期刊青年编委等。
期刊简介


欢迎扫码进入期刊主页
Control Theory and Technology (CTT), 中文名《控制理论与技术》, 创刊于2003年,原刊名为Journal of Control Theory and Applications,2014年刊名更改为Control Theory and Technology。由华南理工大学与中国科学院数学与系统科学研究院联合主办,主要报道系统控制科学中具有新观念、新思想的理论研究成果及其在各个领域中的应用。目前被 ESCI (JIF 1.5)、EI、Scopus (CiteScore 3.2)、CSCD、INSPEC、ACM 等众多数据库收录, 并于2013–2018年获得两期中国科技期刊国际影响力提升计划项目资助。2017–2021年连续获得“中国最具国际影响力学术期刊”和“中国国际影响力优秀学术期刊”称号,获得广东省高水平科技期刊建设项目(2021-2024年),2022-2024年进入中国科协自动化学科领域高质量科技期刊目录。
官网:https://link.springer.com/journal/11768 (即http://www.springer.com/11768)
https://jcta.ijournals.cn/cta_en/ch/index.aspx
投稿:https://mc03.manuscriptcentral.com/ctt
微信:ControlTheoryTech (欢迎扫码关注期刊微信公众号)

微博:ControlTheoryTech
Email:jcta@scut.edu.cn
Tel:020-8711 1464
2023-2024刊期合集
Volume 22 (February - November 2024)
Issue 3, 2024 - Special issue on analysis and control of complex systems in honor of the 90th birthday of Professor Huashu Qin
Issue 2, 2024 - Special issue on system identification and estimation
Volume 21 (February - November 2023)
Issue 3, 2023 - Special issue on frontiers of control and automation, dedicated to Prof. Ben M. Chen 60th birthday
Issue 1, 2023 - Special issue on connecting theory and practice with ADRC
https://wap.sciencenet.cn/blog-3635716-1502154.html
上一篇:一种基于鲁棒MP-ADRC的不确定最小相位系统控制策略
下一篇:CTT期刊2023-2024年专刊合集