博文
[转载]简易热辅助技术制造高性能可编程磁性软体机器人
||

作者
牛福洲1,2, 薛瞿豪1, 曹青2,3, 何昕洋1, 王韬磊1, 王皓辰1, 郝崇磊4, 李霄剑5,*, 李莹6,*, 杨浩7,*, 杨华勇2,3, 韩冬2,3,*
机构
1.苏州科技大学机械工程学院
2.浙江大学流体动力与机电系统国家重点实验室
3.浙江大学机械工程学院
4.哈尔滨工业大学机电工程学院
5.合肥工业大学管理学院
6.深圳工业大学机电工程学院
7.苏州大学机电工程学院
Citation
Niu F Z, Xue Q H, Cao Q, et al. 2025. Magneto-soft robots based on multi-materials optimizing and heat-assisted in-situ magnetic domains programming. Int. J. Extrem. Manuf. 7. 055506.
扫码获取全文

https://doi.org/10.1088/2631-7990/add7a4
撰稿 | 文章作者
1.文章导读
软体机器人具有卓越的灵活性和适应性,因其在生物医学领域的广泛应用前景而备受关注,但如何高效制造具有可编程三维磁畴的软体机器人仍面临材料配比和制造工艺两大难题。
近期,由苏州科技大学和浙江大学流体动力与机电系统国家重点实验室等单位组成的研究团队,成功开发了一种热辅助原位集成成型方法,实现了磁性材料的优化配比和三维可编程磁畴的简便制造。相关成果以“Magneto-Soft Robots Based on Multi-Materials Optimizing and Heat-Assisted In-Situ Magnetic Domains Programming”为题发表在《极端制造(英文)》(International Journal of Extreme Manufacturing)。
2.图文解析
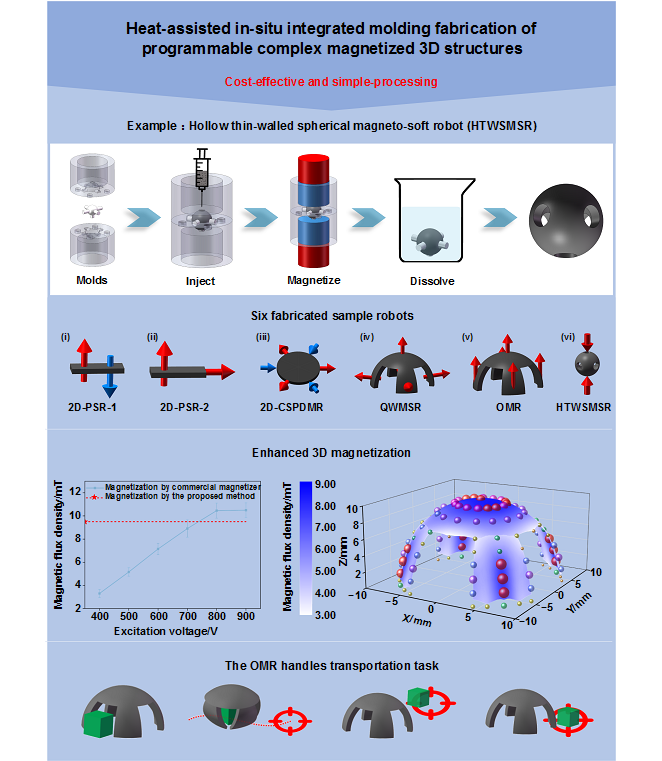
本研究的创新之处在于提出了一种热辅助原位集成成型方法(如图1所示),解决了磁性软体机器人制造中的两大关键挑战:材料优化与磁畴编程。
研究团队探索了不同PDMS与Ecoflex的质量比(0:1、1:4、1:2、1:1和1:0)以及不同磁性颗粒含量(30%至70%)的组合效果。通过应力-应变曲线分析和磁响应性能测试,确定了1:2的PDMS与Ecoflex质量比和50%的磁性颗粒含量为最佳配方,在机械强度、柔韧性和磁响应性之间取得了完美平衡。(如图2所示)。
研究的另一亮点是,团队通过系统实验发现,开发了热辅助原位磁畴编程技术。通过在120°C的温度下进行磁化,样品表面磁通密度达到9.5 mT,是室温下(4.8 mT)的2倍,且与商用磁化器相当(如图3所示)。这种方法无需昂贵设备,简化了制造流程,显著降低了成本。
更令人印象深刻的是,团队成功制造了六种不同功能的软体机器人,展现了该技术的多样性应用潜力。包括:二维图案化软体机器人(2D-PSR)、圆形六极磁畴分布磁性软体机器人(2D-CSPDMR)、四足行走磁性软体机器人(QWMSR)、物体操作机器人(OMR)和中空薄壁球形磁性软体机器人(HTWSMSR)。这些机器人展示了从平面变形到三维运动的多种能力,以及物体操作和液体输送等功能(如图4-7所示),为磁性软体机器人在医疗微创手术和精准药物输送等领域的应用提供了新的技术路径。
值得注意的是,该一体化方法特别适合制造中空薄壁结构,这在其他制造方法中往往难以实现。如图8所示,研究团队采用特殊设计的三部分模具(公模、母模和填充模具),成功制造出具有5个对称释放孔的中空薄壁球形磁性软体机器人。这种复杂结构的一体化制造过程既保证了结构完整性,又实现了精确的磁畴分布,为软体机器人的结构和功能设计提供了全新的可能性。
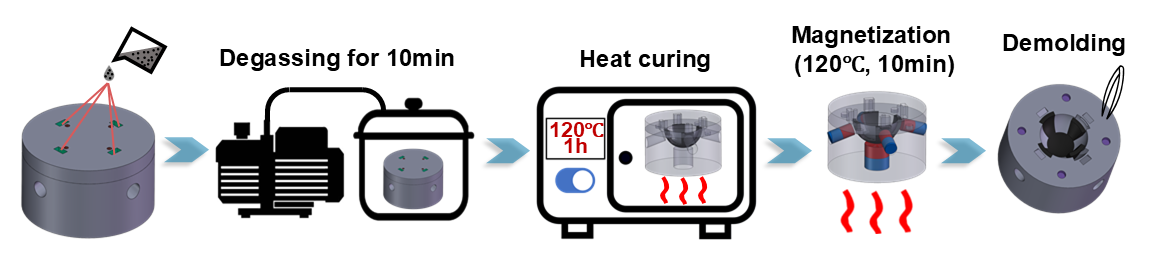
图1 通过热辅助原位集成成型方法,制备具有三维可编程磁畴的磁性软体机器人。
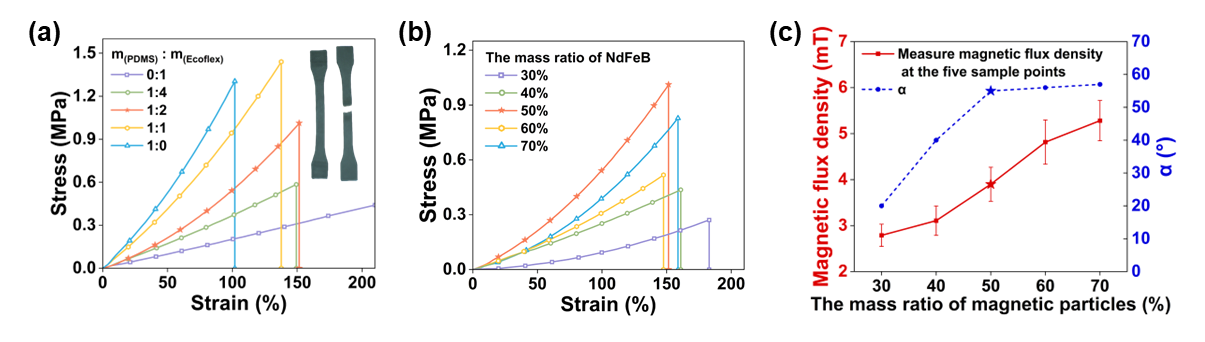
图2 磁响应软材料在优化配比后的材料性能。(a) PDMS与Ecoflex在不同质量比下的应力-应变曲线。(b) 磁性颗粒在不同浓度下的应力-应变曲线。(c) 磁响应软材料在不同磁性颗粒浓度下的变形能力。
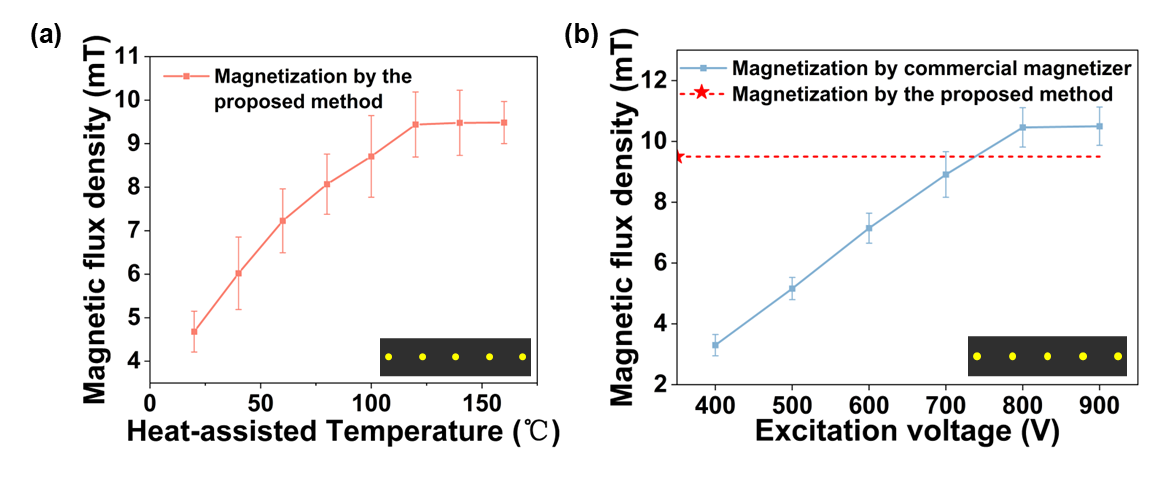
图3 热辅助原位磁畴编程技术。(a) 不同温度对机器人磁化的影响。(b) 将我们提出的磁化方法与商用充磁机进行对比。

图4 六种不同功能的磁性软体机器人。
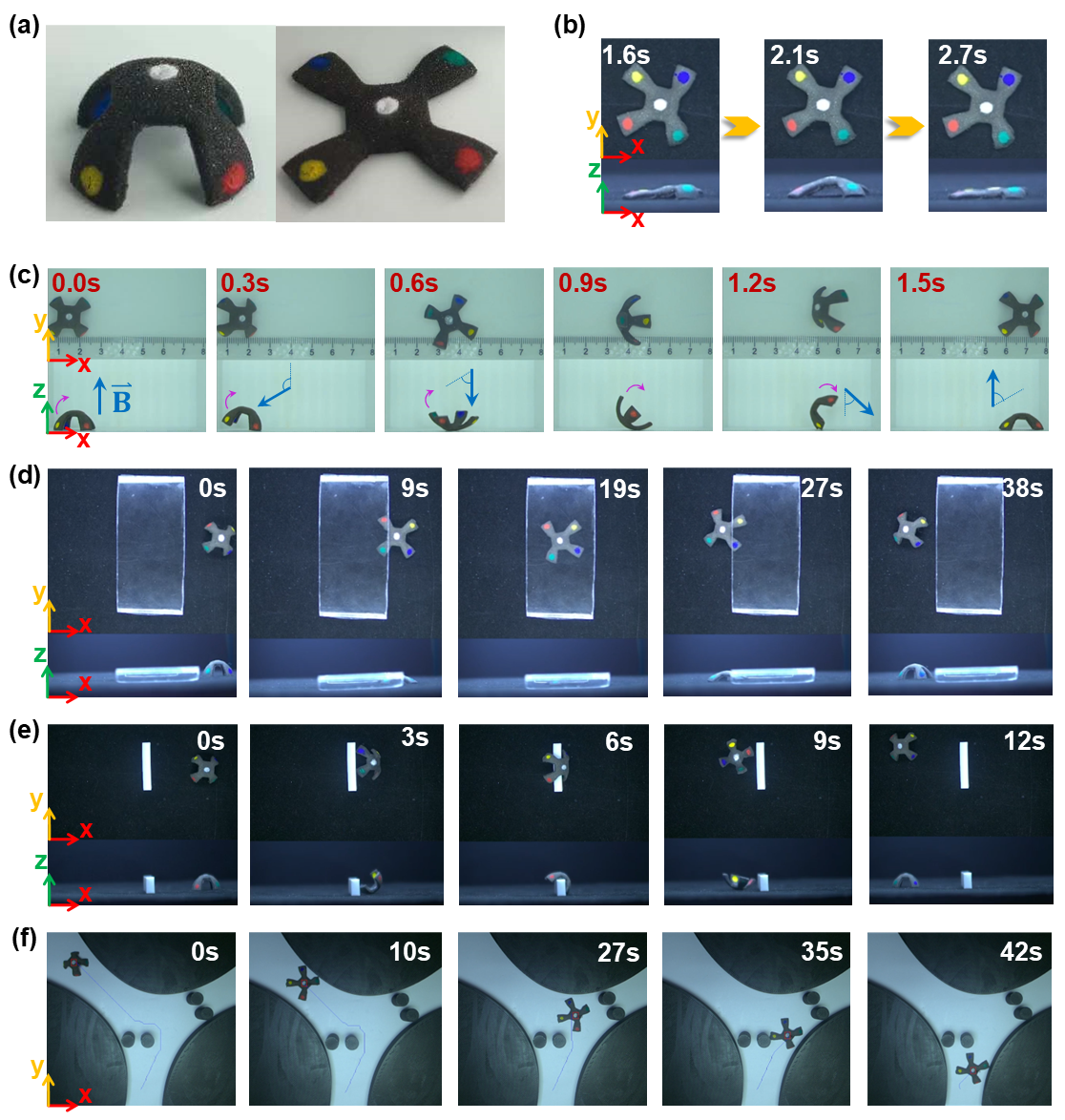
图5 四足行走磁性软体机器人的多模态运动以及在复杂环境下的优秀适应能力。(a) 四足爬行机器人的实物图。(b) 爬行运动。(c) 翻滚运动。(d) 穿过狭窄通道。(e) 翻越障碍物。(f) 在迷宫内避开障碍物并且规划最佳路径。
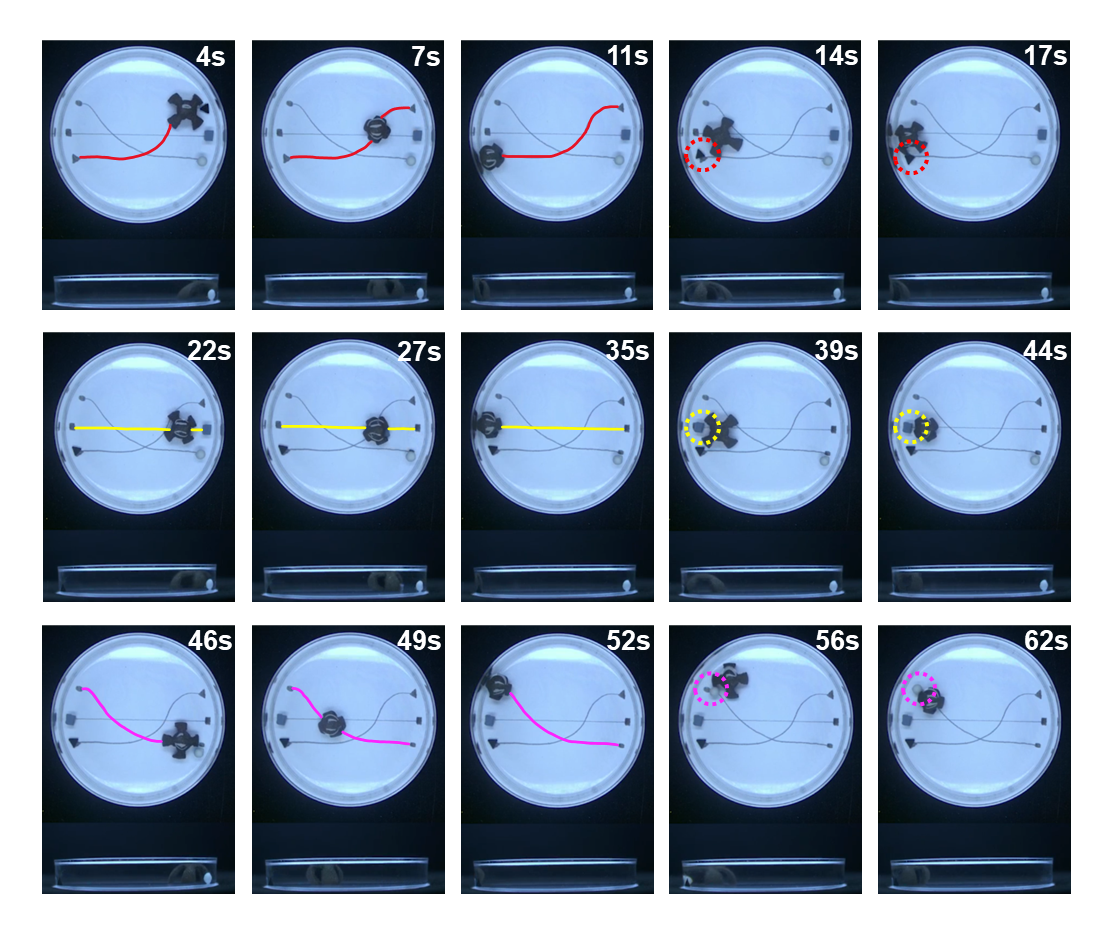
图6 物体操作机器人在液体环境下执行运输任务。
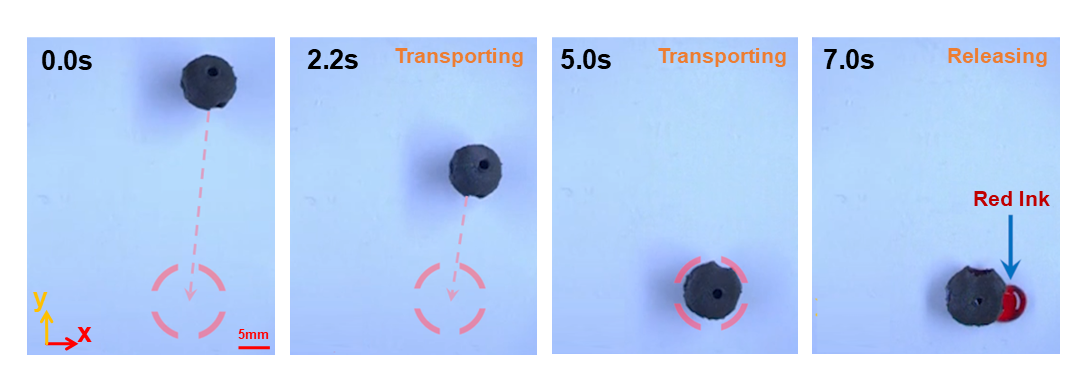
图7 中空薄壁球形磁性软体机器人运输以及释放液体。
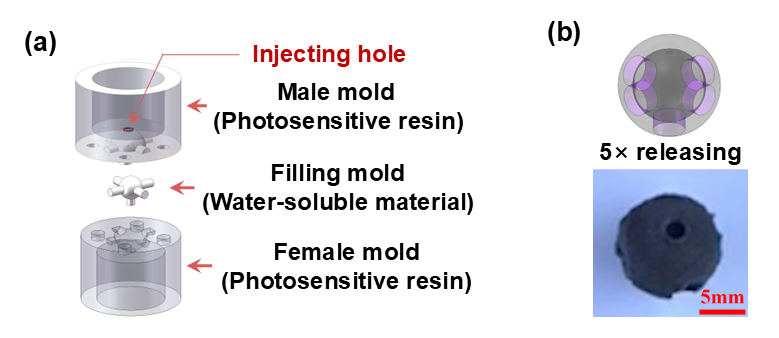
图8 中空薄壁球形磁性软体机器人的模具与实物。
3.总结与展望
本研究提出的热辅助原位磁畴编程技术为磁性软体机器人的制造提供了一种低成本、易制造、高效率的新方法。通过优化多材料配比和创新的磁畴编程工艺,研究团队成功开发了多种具有不同功能的软体机器人,展示了从简单平面变形到复杂三维运动的多种能力。
未来,研究者们将进一步探索更精细的磁畴控制方法,如利用激光加热提高磁畴制备的精度,开发智能响应材料以增强机器人的功能多样性,并探索在实际生物医学应用中的潜力。
4.作者团队与简介
本研究由苏州科技大学牛福洲副教授领衔,联合浙江大学流体动力与机电系统国家重点实验室等多家科研机构共同完成。牛福洲是苏州科技大学机械工程学院的青年学者(副教授),主要研究方向为软体机器人、磁性材料与智能制造技术。他带领的研究团队致力于开发新型磁场驱动系统和智能软体机器人。
本项目的核心团队成员包括苏州科技大学的薛瞿豪、何昕洋、王韬磊和王皓辰,以及浙江大学的曹青和韩东教授等。团队汇集了机械工程、材料科学和控制工程等多学科背景的研究人员,形成了从材料制备、机器人设计到控制算法的完整研究链条。
团队实验室配备了先进的3D打印设备、磁性材料表征系统和多种类精密控制平台,为磁性软体机器人的研发提供了坚实的硬件基础。
团队研究得到了国家自然科学基金、江苏省优秀青年基金、国家重点研发计划等多项科研项目的支持。
欢迎关注团队研究动态,了解更多磁性软体机器人的最新进展!
https://wap.sciencenet.cn/blog-3589572-1502505.html
上一篇:[转载]低温一步烧结成形SiC基陶瓷及其力学性能各向异性调控机理
下一篇:[转载]“软物质与生物集成电子器件”在线论坛,9月23日20:00开播!