
 精选
精选
文章导读
本文针对人形机器人面部表情缺乏量化评估的难题,设计了一款具备6种基础表情的人形机器人头部,通过刚性连杆驱动 + 按扣连接提升传动效率与皮肤寿命,并利用柔性垂直石墨烯传感器 (VG Sensor) 测量人脸与机器人皮肤应变,提出基于应变差异率的拟人化评估方法。实验验证其完成的基本面部表情被人类识别率超 80%。基于提出的表情评估方法对表情机器人进行评估,为机器人表情设计及结构优化的提供了关键数据参考。
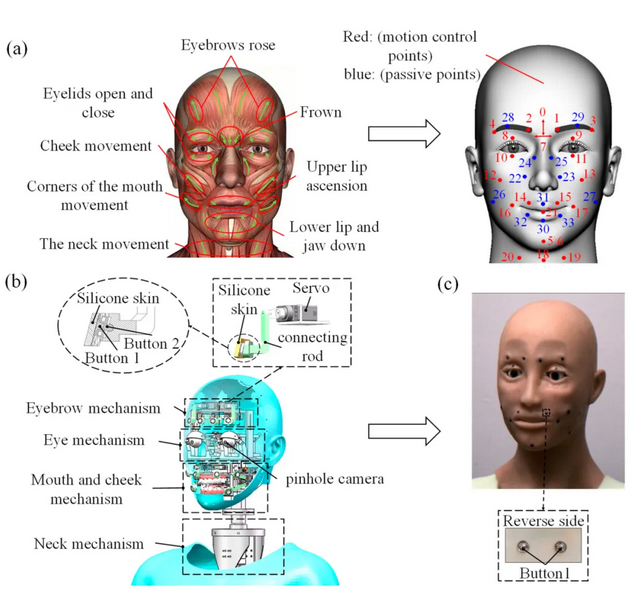
面部表情机器人设计图
主要内容
仿生机械:让机器人“面部肌肉”动起来
研究以人类面部44块肌肉运动为灵感,基于FACS系统在机器人硅胶皮肤上设定32个驱动点 (19个主动控制点 + 13个被动点),构建眉 (4自由度)、眼 (4自由度)、嘴颊 (8自由度)、颈 (3自由度) 的19自由度机械结构。采用伺服电机驱动 + 刚性连杆和按扣传动,将动力高效传递至皮肤,相比传统绳索驱动,传动效率提升,皮肤寿命延长,且避免了气动驱动的重量与成本问题。通过Maya模拟人类表情最大强度运动参数,结合树莓派主控系统,成功实现表情的精准复现与动态控制。
柔性传感:用数据“看见”表情的“真实感”
团队利用60 mm × 8 mm × 0.8 mm柔性VG传感器,在人脸与机器人皮肤对应部位 (如左右眉尖S3/S4、嘴角S7/S8等16个位点) 同步测量应变。通过应变-电压校准模型 (yi = a·xi),建立人机运动数据对比基准。创新性提出应变差异率公式 δ=(εᵣ-εₕ)/εₕ,以δ值 ≤ ±2%为“高拟人度”标准。例如,“悲伤”表情全部位δ值均在1.5%以内,而“愤怒”因左侧嘴角应变差异达9.4%,成为优化重点。该方法首次将表情评估从主观识别转向客观物理量对比,提升了研究科学性。
实验验证:数据背后的“表情可信度”
研究通过表情识别实验与应变对比分析双重验证表情拟人度:210名受试者对机器人6种基础表情的识别率均超80%,其中“悲伤”达97.14%,“愤怒”因左右嘴角运动不对称 (应变差异率 9.4%) 识别率最低 (80.48%)。同步采用柔性VG传感器测量人机面部16个位点的应变,发现“悲伤”表情全部位应变差异率均<2%,而“惊讶”的眉部、“愤怒”的嘴角等区域差异显著,印证了表情可信度与应变匹配度的直接关联。此外,通过应变曲线计算冲量 (能量消耗),揭示眼睑与嘴角为高能耗区域,“悲伤”总冲量最大 (64N・S),为驱动系统优化提供量化依据。
创新价值:重新定义“会表情的机器人”
研究通过多维度创新构建了机器人表情研究的科学框架:在机械设计上,采用刚性连杆驱动与硅胶皮肤按扣连接,相比传统绳索或气动方案,传动效率得以提升、皮肤寿命延长50%,解决了运动精度低与皮肤易损的难题;在评估方法上,首次利用柔性VG传感器同步测量人机面部应变,提出基于应变差异率 (δ=(εᵣ-εₕ)/εₕ) 的拟人度量化模型,使表情“真实感”可通过物理量精准评估,实验验证其δ值排序与人类识别率高度吻合;在应用层面,通过冲量计算 (Iᵢ=∫Fdt) 分析能量消耗,发现眼睑、嘴角等部位为高能耗区域,为驱动部件选型 (如配置高扭矩伺服电机) 提供数据支撑,同时为人类面部情绪的生物力学研究提供仿生参考。这些突破首次将机器人表情从“主观模仿”带入“客观量化”时代,为社交机器人、医疗辅助等场景的情感化交互设计奠定了关键技术基础。
结论与展望
这项研究通过机械仿生-数据评估-能量优化的完整链条,为机器人表情设计建立了可量化、可复现的研究范式,让机器人拥有“丰富且生动的表情”成为可能。从实验室的19自由度原型机器人到未来情感丰富的社交机器人,该成果正推动人机交互从“功能交互”迈向“人工情感交互”。正如研究指出:当机器人表情的“拟人程度”可以用数据定义,人类与机器的情感连接将开启全新可能。
原文出自 Biomimetics 期刊:https://www.mdpi.com/2684042
期刊主页:https://www.mdpi.com/journal/biomimetics
Biomimetics 期刊介绍
主编:Stanislav N. Gorb, Kiel University, Germany
期刊致力于研究生物体的最基本方面及其特性向人类应用的转移。期刊旨在为材料科学、机械工程、纳米技术和生物医学领域的研究人员和专业人士提供一个平台,通过在工程系统、技术和生物医学中利用生物启发的设计,开发实现可持续创新的解决方案。
2024 Impact Factor:3.9
2024 CiteScore:4.2
Time to First Decision:20.3 Days
Acceptance to Publication:2.9 Days


转载本文请联系原作者获取授权,同时请注明本文来自MDPI开放科学科学网博客。
链接地址:https://wap.sciencenet.cn/blog-3516770-1498730.html?mobile=1
收藏