博文
基于自适应模糊自抗扰控制的宏微直线平台运动控制 | Symmetry
||
文章导读
宏微复合驱动理念可以很好的解决高速、大行程与高精度定位之间的矛盾,将进行高速、高加速、大行程的宏运平台与精密定位的微动平台结合起来,可以提高平台在高速、高加速、大行程运动情况下的精密定位性能。但平台进行精密定位过程中易受到外部扰动、电气噪声、模型参数摄动、非线性摩擦力等多种复杂扰动,对平台定位性能产生影响。来自哈尔滨工业大学的王明义教授及其团队在 Symmetry 期刊发表的文章,对宏微直线平台进行对称式结构设计,采用自适应模糊线性自抗扰 (AFLADRC) 宏微主从控制结构,使宏微系统具有更高的鲁棒性及更简单的整定过程。
研究过程与结果
本文提出了一种采用自适应模糊线性自抗扰 (AFLADRC) 宏微主从控制结构,通过模糊推理对自抗扰控制器的Kp和Kd参数进行整定和实时调节,使控制系统具有更高的鲁棒性及更简单的整定过程。其中,宏微平台采用对称式设计,宏动平台采用永磁同步直线电机 (PMLSM) 驱动,微动平台采用音圈电机驱动。
本文的核心思想是,在宏微主从控制结构的基础上,通过自抗扰控制方法与自适应模糊控制结合的方式,设计新的模糊自抗扰控制器 (AFLADRC)。通过模糊思想的加入,在线调整自抗扰控制器的增益变量,能够更有效地抑制外界扰动对系统的影响,从而提高系统的稳定性和鲁棒性。根据自抗扰控制器中的LSEF的工作原理,在实际的使用中,需要根据系统状态调整LSEF的控制增益Kp和Kd的值,所以Kp和Kd将作为模糊控制器的控制量,来实现参数的自适应调整 (图1)。
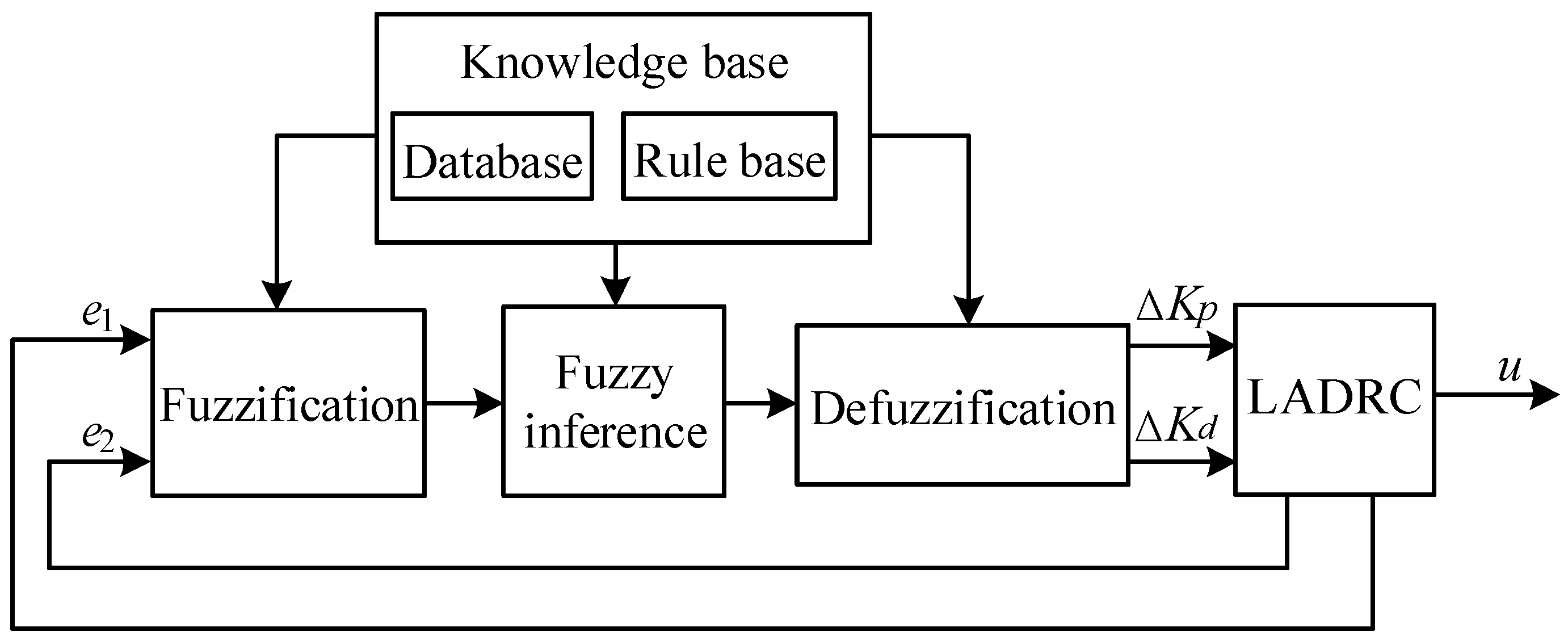
图1.模糊LADRC控制原理。
在宏动跟随微动的主从控制结构中,微动台的控制精度直接决定整个系统的定位精度。所以要对微动台音圈电机实现高精度控制,引入自适应模糊自抗扰控制 (图2)。最后作者通过进行一系列实验,位置指令为具有对称性的S曲线往复运动轨迹,表明了模糊自抗扰的控制效果更优秀,系统鲁棒性更强 (图3)。
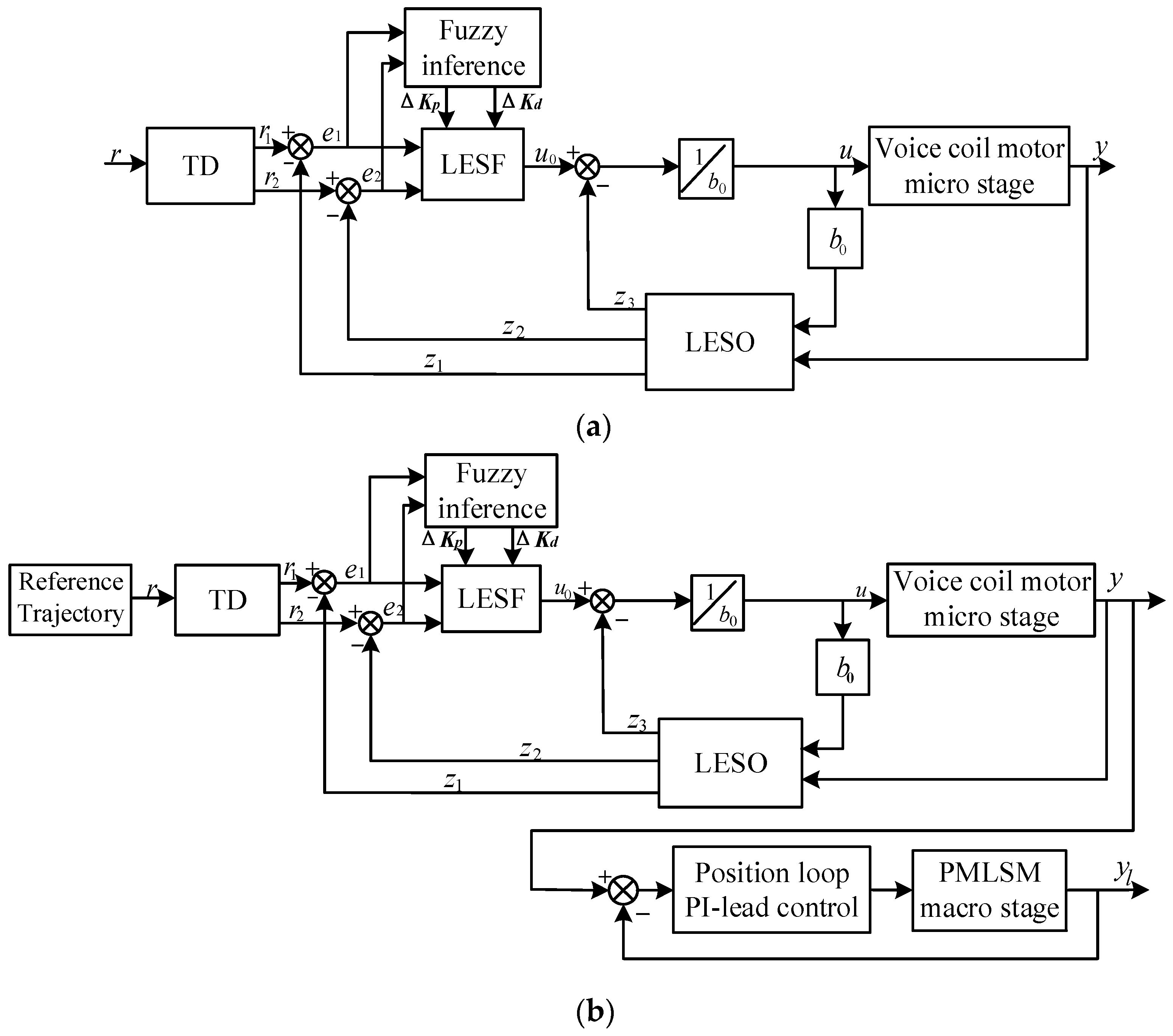
图2.宏微系统控制框图。
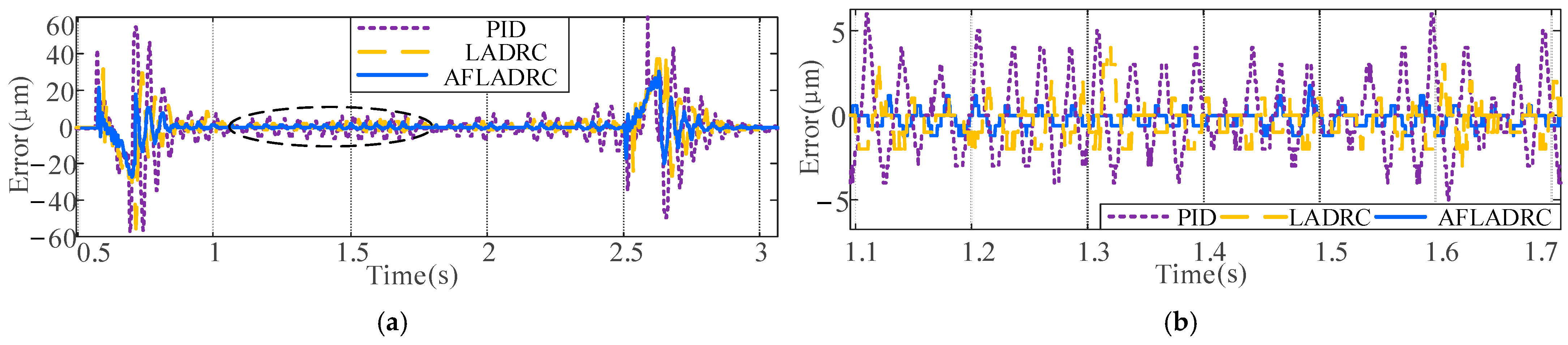
图3.S曲线跟踪实验结果:(a) 动态跟踪误差对比;(b) 匀速稳态误差对比。
研究总结
本文提出了一种将自适应模糊算法和线性自抗扰控制结合的控制方法—自适应模糊自抗扰控制。与LADRC相比,自适应模糊LADRC通过结合模糊逻辑的灵活性和自抗扰控制的鲁棒性,在不同工作条件下自动调整控制参数,能够更有效地抑制外界扰动对宏微系统的影响。作者对微动平台的LESF设计模糊推理规则,包括隶属度函数集和控制规则表等,提高了系统的适应性和灵活性。其实验结果与理论估计相一致,表明自适应模糊LADRC在宏微直线运动平台控制中具有优秀的抗干扰能力和精确运动控制效果。该论文对理论研究和实验验证都有着重要意义,为电机驱动控制相关领域的研究提供了参考。
原文出自 Symmetry 期刊
Wang, M.; Kang, T.; Kang, K.; Zhang, C.; Li, L. Motion Control of Macro–Micro Linear Platform Based on Adaptive Fuzzy Active Disturbance Rejection Control. Symmetry 2024, 16, 707. https://www.mdpi.com/2073-8994/16/6/707
Symmetry 期刊介绍
主编:Sergei D. Odintsov, Barcelona and Institute of Space Sciences (IEEC-CSIC), Spain
期刊主题涵盖了所有科学研究中有关对称/非对称现象的理论和应用研究,主要包括数学、计算机、工程与材料、物理学、生命科学、化学等领域的最新进展。期刊已被 Scopus、SCIE (Web of Science)、CAPlus/SciFinder 等多家知名数据库收录
2023 Impact Factor:2.2
2023 CiteScore:5.4
Time to First Decision:16.8 Days
Time to Publication:36 Days


https://wap.sciencenet.cn/blog-3516770-1441069.html
上一篇:创新选题+高效写作+细节审校,科研论文写作全流程解析 | MDPI 作者说
下一篇:利用 YOLOv7-Tiny 改进无人机摄影图像的目标检测方法 | MDPI Algorithms