
引用本文
陈波, 张辉, 江一鸣, 钟杭, 王耀南. 基于分层仿生神经网络的多机器人协同区域搜索算法. 自动化学报, 2025, 51(4): 890−902 doi: 10.16383/j.aas.c240458
Chen Bo, Zhang Hui, Jiang Yi-Ming, Zhong Hang, Wang Yao-Nan. A hierarchical bio-inspired neural network based multi-robot cooperative area search algorithm. Acta Automatica Sinica, 2025, 51(4): 890−902 doi: 10.16383/j.aas.c240458
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c240458
关键词
未知环境,多机器人系统,区域搜索,仿生神经网络,分布式模型预测控制
摘要
针对多机器人系统在复杂未知环境下的区域搜索问题, 提出一种基于分层仿生神经网络的多机器人协同区域搜索算法. 首先将仿生神经网络(Bio-inspired neural network, BNN) 和不同分辨率下的区域栅格地图结合, 构建分层仿生神经网络信息模型, 其中包括区域搜索神经网络信息模型(Area search neural network information model, AS-BNN)和区域覆盖神经网络信息模型(Area coverage neural network information model, AC-BNN). 机器人在任务区域内实时探测到的环境信息将转换为AS-BNN和AC-BNN中神经元的动态活性值. 其次, 在分层仿生神经网络信息模型基础上引入分布式模型预测控制(Distributed model predictive control, DMPC)框架, 并设计多机器人分层协同决策机制. 当机器人处于正常搜索状态时, 基于AS-BNN进行搜索路径滚动优化决策; 当机器人陷入局部最优状态时, 则启用AC-BNN引导机器人快速找到新的未搜索区域. 最后, 在复杂未知环境下进行多机器人区域搜索仿真实验, 并与该领域内的3种算法进行比较. 仿真结果验证了所提算法能够在复杂未知环境下引导多机器人系统高效地完成区域搜索任务.
文章导读
机器人在危险或恶劣环境下进行侦查、搜救、探测等复杂任务时, 多机器人区域搜索有着广泛的应用[1-2]. 相比于单个机器人, 多机器人系统在灵活性、鲁棒性和并行性等方面具备显著优势, 可以极大地提高区域搜索任务的效率[3-5]. 目前针对复杂多变的未知环境或非结构化环境, 由于先验知识缺乏或环境要素难以辨识, 缺少全局的地图信息, 需要多机器人协同对未知环境进行区域覆盖搜索, 即多机器人需要尽快探索未知区域, 以找到所需的目标信息[6-7]. 在复杂未知的障碍环境中, 机器人通常会面临以下约束: 1) 有限的探测范围. 机器人的探测范围相对于整个任务区域的面积较小, 这一约束限制了机器人同时感知整个环境的能力. 2) 缺乏先验环境信息. 机器人在没有任何先验知识或环境信息的情况下开始区域搜索任务, 它们从零开始, 在前进的过程中不断探索和收集信息. 3) 实时避障. 机器人必须实时规划和运动, 以避开未知环境中的障碍物和其他机器人; 每个机器人需要进行实时决策, 以确保安全高效地执行搜索任务.
在多机器人协同区域搜索框架中, 机器人首先整合当前时刻自身及其他机器人获取的环境信息, 然后与其他机器人进行协同决策, 最后规划路径并运动至下一步位置, 重复上述过程, 直至整个区域搜索任务完成. 此外, 多机器人系统在决策过程中必须考虑如何减少机器人之间决策冲突等问题. 因此, 相较于已知环境下的多机器人区域搜索任务, 未知环境下的多机器人区域搜索任务更具挑战性, 并受到了广泛关注.
目前, 研究人员针对多机器人区域搜索问题提出了一系列解决方法, 大致可划分为五类: 1)基于生成树覆盖 (STC) 的区域搜索算法. 例如, Zheng等[8]提出一种基于STC的区域搜索算法(MSTC), 以实现多机器人对已知地形的区域搜索. Pehli-vanoglu等[9]提出一种结合Voronoi图和STC的多机器人协同区域搜索方法. 此外, Dong等[10]进一步提出一种人工加权生成树覆盖算法(AWSTC), 有效地提升了区域搜索效率. 虽然基于STC的区域搜索算法增强了机器人遍历整个区域的鲁棒性, 但主要适用于已知环境下的区域搜索任务[11]. 2)基于群体智能的区域搜索方法. 例如自适应粒子群优化算法[12-13] (A-RPSO)、蝙蝠群算法[14] (BAT)免疫遗传算法[15] (IGA)、细菌群趋化[16] (BC)、灰狼算法[17] (GWO)等. 这些方法通常根据目标信号值设计算法的适应度函数, 引导机器人搜索任务区域. 然而在复杂未知环境中, 机器人通常难以对目标信号进行全局感知. 3)基于任务分配的区域搜索方法. Hou等[18]开发了一个任务规划系统(MPS), 由初步规划层、任务分配层和规划后层组成. Dai等[19]在多机器人区域搜索任务中采用一种基于拍卖的方法来实现任务分配. 任务分配是提高搜索效率的有效途径, 然而, 如何在未知环境下实现多机器人任务分配协作仍有待解决. 4)基于学习的区域搜索算法. 例如, Li等[20]针对群机器人中的多目标搜索问题提出一种两阶段模仿学习框架. Liu等[21]提出一种基于强化学习引导机器人规划搜索路径方法. Wang等[22]提出一种采用动作偏好选择策略的改进强化学习算法, 该算法在强化学习的基础上, 通过改变优选动作的选择方式, 解决了随机策略中无效搜索的问题. 然而, 此类基于学习的区域搜索方法可能不适合实时应用, 因为学习过程是必要的, 且需要大量的时间. 5)基于仿生神经网络(Bio-inspired neural network, BNN)的区域搜索方法. BNN主要受Hodgkin和Huxley[23]的生物神经系统模型和分流模型[24]启发. BNN中神经元连接权值是在模型设计时设定的, 可以在很大范围内选择, 无需寻找神经元之间的最优连接权值. 因此, 基于BNN的区域搜索算法不需要学习过程, 可实时运行[25]. 此外, 与其他方法相比, 基于BNN的区域搜索算法不依赖任何环境变化的先验知识[7]. 近年来, Luo等[26]提出一种基于BNN的多机器人区域搜索算法, 增强了多机器人整体之间的协作性. Sun等[27]进一步提出一种基于离散时间BNN的区域搜索算法, 在保证多机器人区域搜索效率的同时减少了计算量. Muthugala等[28]从节能的角度提出一种基于BNN的多机器人完全区域搜索算法. Chen等[6]提出一种基于BNN的多机器人分布式协作区域搜索(DCRS)算法. DCRS算法通过引入分布式模型预测控制(Distributed model predictive control, DMPC)思想, 每个机器人结合其他机器人的决策信息滚动优化自身的搜索路径, 进而提升了多机器人系统搜索效率. 然而, 上述算法主要应用于简单障碍物环境下的多机器人区域搜索任务. 当上述算法应用于复杂未知的障碍物环境时, 机器人可能陷入局部最优的状态且难以快速逃离, 导致区域搜索效率可能会出现下降.
因此, 针对上述挑战, 本文提出一种基于分层仿生神经网络的多机器人协同区域搜索算法, 在机器人陷入局部最优时, 引导机器人快速找到未搜索区域, 并通过分层协同决策机制减少机器人之间的决策冲突, 从而保证多机器人系统在复杂未知的障碍物环境下高效完成区域搜索任务. 本文的主要创新贡献如下:
● 构建了新的分层仿生神经网络信息模型: 将BNN分别和栅格地图及覆盖地图结合, 构建了区域搜索神经网络信息模型(Area search neural network information model, AS-BNN)和区域覆盖神经网络信息模型(Area coverage neural network information model, AC-BNN). 任务搜索区域内的相应环境信息将转换为AS-BNN和AC-BNN中神经元的动态活性值, 分别作为机器人处于正常搜索状态下和陷入局部最优状态下的决策基础.
● 设计了一种多机器人分层协同决策机制: 在DMPC协同决策框架下, 当机器人处于正常搜索状态时, 将基于AS-BNN进行搜索路径滚动优化决策; 当机器人陷入局部最优状态时, 则启用AC-BNN引导机器人快速找到新的未搜索区域.
本文剩余部分安排如下: 第1节介绍本文的研究问题; 第2节介绍分层仿生神经网络信息模型; 第3节详细介绍多机器人协同搜索决策过程, 尤其是分层协同决策机制; 第4节进行相应的仿真实验与分析; 第5节进行总结与展望.
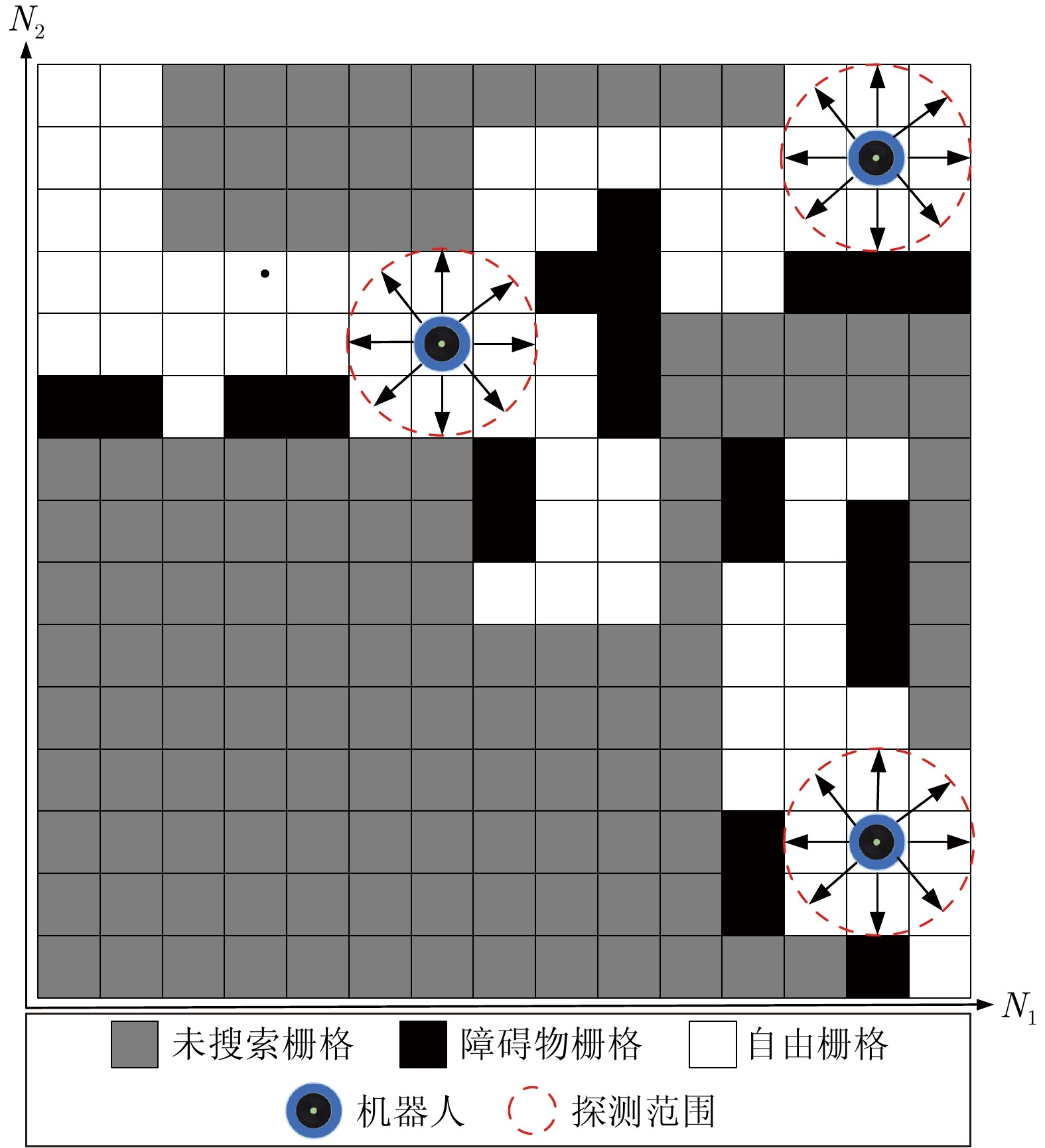
图 1 区域搜索地图示例
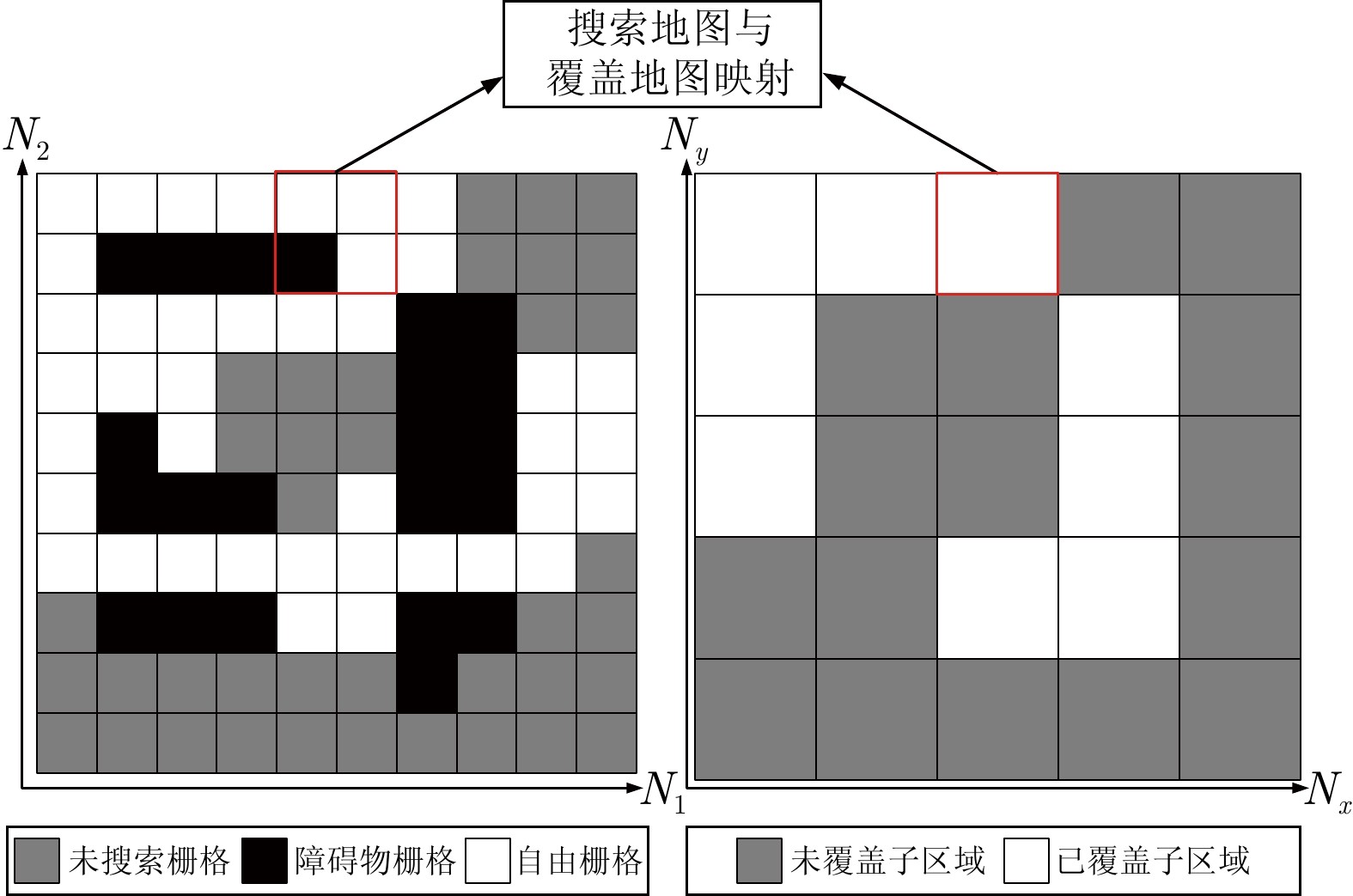
图 2 区域搜索地图与区域覆盖地图映射示例(sf=2)
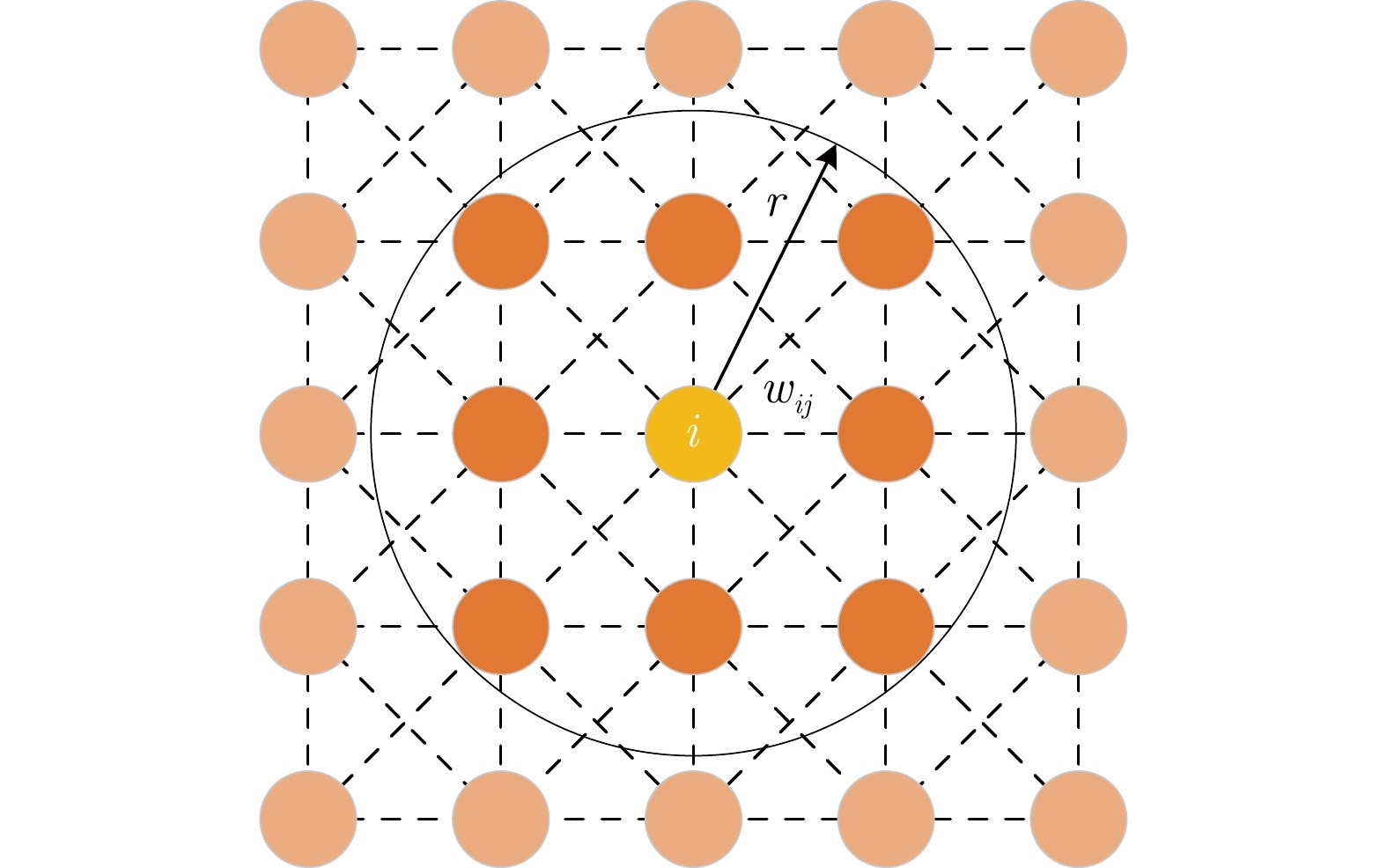
图 3 二维BNN结构
本文针对复杂未知环境下的区域搜索问题, 提出一种新的基于分层仿生神经网络的多机器人协同区域搜索算法. 该算法主要由两个部分组成: 分层仿生神经网络信息模型以及多机器人分层协同决策机制. 在分层仿生神经网络信息模型中, 两层信息模型(AS-BNN和AC-BNN)对应的神经元活性值信息构成了机器人不同状态下的决策基础. 此外, 本文设计了一种分层协同决策机制来引导机器人摆脱复杂未知环境中可能出现的局部最优状态. 这种机制确保了机器人的高效搜索能力, 同时避免了多机器人间决策冲突和搜索路径重复. 仿真结果验证了本文所提算法对复杂未知环境下多机器人区域搜索任务的有效性. 与3种基线算法相比, 所提算法具备更高的区域搜索效率, 表明本文所提算法在应对复杂未知环境下区域搜索任务的优越性. 在未来的工作中, 我们将研究大范围任务区域下多机器人协同搜索问题, 并考虑进一步增大机器人数量规模后相应的区域搜索策略.
作者简介
陈波
湖南大学机器人学院博士研究生. 2022年获得郑州大学控制科学与工程专业硕士学位. 主要研究方向为多机器人系统运动规划. E-mail: cb233cb@163.com
张辉
湖南大学机器人学院教授, 机器人视觉感知与控制技术国家工程研究中心副主任. 2004年、2007年和2012年获得湖南大学学士、硕士和博士学位. 主要研究方向为机器人视觉感知与智能控制. 本文通信作者. E-mail: zhanghuihby@126.com
江一鸣
湖南大学机器人学院副教授, 机器人视觉感知与控制技术国家工程研究中心副研究员. 主要研究方向为多机器人协同控制及应用. E-mail: ymjiang@hnu.edu.cn
钟杭
湖南大学机器人学院副教授. 2013年、2016年和2020年获得湖南大学学士、硕士和博士学位. 主要研究方向为机器人控制, 视觉伺服和路径规划. E-mail: zhonghang@hnu.edu.cn
王耀南
中国工程院院士, 湖南大学机器人学院教授. 1995年获得湖南大学博士学位. 主要研究方向为机器人学, 智能控制. E-mail: yaonan@hnu.edu.cn
转载本文请联系原作者获取授权,同时请注明本文来自Ouariel科学网博客。
链接地址:https://wap.sciencenet.cn/blog-3291369-1487599.html?mobile=1
收藏