
引用本文
杨海骄, 刘安, 何舒平. 通信路径损耗下多智能体系统固定时间防碰防离编队控制. 自动化学报, 2025, 51(3): 643−657 doi: 10.16383/j.aas.c240445
Yang Hai-Jiao, Liu An, He Shu-Ping. Fixed-time formation control of multi-agent systems with collision and isolation avoidance under communication path loss. Acta Automatica Sinica, 2025, 51(3): 643−657 doi: 10.16383/j.aas.c240445
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c240445
关键词
多智能体系统,通信路径损耗,预设时间防碰防离,分层滑模控制,固定时间编队控制
摘要
针对多智能体系统中邻居间通信存在通信路径损耗的情况, 研究距离−变权重通信拓扑下非线性多智能体系统固定时间防碰防离编队控制问题, 充分考虑通信路径损耗所引起的拓扑变化的不确定性和距离相关性、系统中未知非线性动力学特性以及固定时间收敛的控制性能要求等. 为解决以上问题, 首先结合通信理论中的通信损耗模型和数学图论知识, 对通信路径损耗下的拓扑结构进行量化建模. 其次, 基于人工势场原理, 设计一套新的预设时间防碰防离策略, 以确保每个智能体在预设时间内离开碰撞与离群预警区, 避免碰撞与离群现象. 同时, 提出一种新的具有自适应增益的分层滑模面结构, 进一步改善系统的动态性能. 在此基础上, 结合自适应技术, 构建一套自适应分层滑模固定时间防碰防离编队控制方案. 所提方案不仅解决了系统本身以及通信路径损耗所引起的非线性动态耦合问题, 而且保证了通信路径损耗情况下多智能体系统的编队任务在固定时间内完成, 同时没有碰撞和离群现象. 最后, 给出严格的理论分析以及对比仿真结果, 证明了所提控制方法的有效性和优越性.
文章导读
多智能体系统的协同控制问题一直是控制领域的研究热点[1−6]. 特别是近十年来, 随着计算机和通信技术的快速发展, 相关协同控制方法被广泛应用在社会、工业等领域, 其中多智能体协同编队控制作为协同控制的基本问题之一备受关注[7−9], 如多无人机集群[7]、多水面无人艇编队[8]、多无人机器人[9]等. 编队控制方法的分类方式是多样的, 从控制结构进行分类, 目前编队控制方法大体可以归结为集中式控制[10]和分布式控制[11−13], 以及二者混合的方法[14]等. 考虑到实际通信资源有限、环境复杂等情况, 分布式控制方法[11−13]比集中式控制方法[10]具有更强的鲁棒性、灵活性和可拓展性等, 因而更受关注.
在多智能体系统中, 分布式协同控制任务的实现依赖相应的通信网络作为支撑, 需要智能体间具有良好的通信关系, 使其能够进行有效的信息交互. 这意味着, 表征智能体间通信关系的通信拓扑结构在协同控制实现过程中起着重要作用. 其中通信拓扑的连通性条件是实现协同控制任务的必要条件. 而通信拓扑的连通性由拓扑结构中各个通信链路共同决定. 在实际协同控制设计中, 由于应用场景或环境的差异化等因素, 所选择使用的通信拓扑结构往往也不同, 比如静态拓扑[15−17]或动态拓扑[18−24]. 相对来说, 采用动态拓扑的控制方案[18−24]更具灵活性和适应性, 能够应对更加复杂的环境. 文献[18]针对带有扰动的多智能体系统, 提出基于动态事件触发机制的协议, 实现系统在切换拓扑下实际固定时间平均一致性问题; 文献[19]在时变平衡图情况下, 设计一种新型的具有压缩通信的分布式聚合梯度跟踪算法, 解决分布式聚合优化问题; 文献[20]针对通信范围较短的情况, 设计一种基于分层深度确定性策略梯度的强化学习框架和控制方案, 解决动态通信拓扑连通性问题和集群控制问题. 文献[21]针对通信链路故障导致通信链路权值具有时变性, 提出一种基于分布式状态观测器的自适应控制协议, 增强了通信链路对故障的抵抗能力. 文献[22]针对通信故障或恶意攻击等原因造成不规则的拓扑切换的情况, 提出一个事件触发的参考调控器, 实现系统无碰撞编队控制. 现有控制方案中所考虑的通信拓扑的动态性, 尤其是通信连接权重的改变, 主要是从性能优化[18−20]、故障[21−22]、通信资源受限[23−24]等因素考虑, 并基于图论建模为动态拓扑. 然而需要指出的是, 在实际通信中, 通信链路存在路径损耗的情况[25−28]. 也就是说, 通信路径损耗是通信链路的自身属性, 在通信中将难以避免. 通信路径损耗问题将导致预先规划好的网络拓扑[18−24]会出现新的不确定改变, 从而使系统中出现非线性耦合动态, 致使现有方法难以正常工作, 甚至将可能威胁整个多智能体系统的稳定性和安全性. 而目前尚未有尝试从通信技术和图论知识相结合的角度, 对路径衰减下通信拓扑进行量化建模的研究工作, 同时也鲜少涉及通信路径衰减下协同控制的研究工作.
另一方面, 在多智能体系统协同编队控制中, 碰撞以及离群问题是一类重要问题. 碰撞会使智能体物理受损, 离群可能会导致拓扑连通性受损, 进而影响整个编队任务的完成甚至损害系统的稳定性和安全性. 目前关于防碰撞防离群的研究已取得一些较好的进展[29−36]. 例如文献[29]提出的防碰策略是基于人工势场的方法, 为每一个智能体在一定距离内设计一个虚拟的斥力, 当其他智能体靠近时, 这个斥力使得智能体之间远离, 从而实现避免碰撞的目的. 文献[30]利用积分−乘正切李雅普诺夫障碍函数方法, 设计一种针对多智能体系统的有限时间控制器, 确保系统在有限时间内实现无碰撞编队任务. 同时, 为避免单独个体离群 (即防离), 文献[31]提出一种基于矩形区域的连通性保持协议, 在维持拓扑连通性的前提下, 实现了离散时间多智能体系统的一致性. 文献[32]研究了通信范围受限下的通信维持问题和协同控制问题, 基于障碍函数技术设计一种自适应模糊规定时间控制协议, 确保在规定的时间内实现共识, 同时维持拓扑连通性. 此外, 文献[33]采用模型预测控制的方法通过考虑相对速度与位置, 为智能体生成一个无碰撞防远离的运动轨迹, 从而实现防碰防离. 文献[34]利用一类新型的广义混合势场构建一套基于分布式梯度的集群控制协议, 同时保证底层通信网络的避碰、理想距离稳定和连通性. 文献[35]则利用动态曲面技术, 采用递归设计原理, 提出基于近似的局部自适应跟踪设计方法以及相应的防碰防离策略. 需要指出的是, 在现有这些防碰防离策略[29−36] 中, 其防碰防离过程中所消耗的时间不确定且无上界, 缺乏快速性和时效性.
此外, 现实中人们对控制系统性能的收敛速度以及控制精度的要求不断提高. 因收敛时间的有界可控性, 有限时间/固定时间/预设时间协同控制方法引起众多学者的重视[37−46]. 其中, 滑模控制技术作为一种非线性控制方法, 具有较好鲁棒性、快速响应性等优点, 其结合有限时间/固定时间/预设时间控制技术, 成为实现系统快速收敛的策略之一, 并取得众多成果[47−50]. 例如, 文献[47]设计一个基于一阶滑模的观测算法, 该算法可以实现半全局固定时间收敛. 文献[48]设计一种二阶新型非奇异终端滑模固定时间控制器, 克服传统滑模控制方法常遇见的奇点问题、收敛时间与初始状态有关、抖震问题. 特别地, 针对高阶系统, 文献[49]提出一种高阶分层积分滑模面的结构, 能有效处理抖震现象, 并改善系统的动态性能. 此外, 为解决多智能体的未知非线性问题, 滑模控制常常与自适应神经网络控制[49]、自适应模糊控制[50]等相结合.
基于以上分析, 受到文献[25−28]中通信路径损耗模型的启发, 拟将通信拓扑的连接权重建模为距离衰减模型. 同时, 为确保编队任务在固定时间内完成, 一方面基于文献[35]的防碰防离思想及预设时间控制技术[46], 提出一种预定义时间防碰防离人工势场, 确保防碰防离策略所消耗的时间是有界且可预设的; 另一方面, 结合滑模控制技术, 提出一种自调节分层滑模面结构, 设计通信路径损耗下的自适应固定时间协同控制协议, 确保多智能体在固定时间内编队完成, 同时全程防碰防离. 本文所提方法的创新性和优势总结如下:
1)本文引入通信领域中的通信路径损耗模型[25−28], 并结合数学图论知识, 构建一种路径损耗下的通信拓扑权重变化的量化模型. 相比于现有结果[18−24], 所构建的路径损耗下的通信拓扑模型更具一般性和实际意义, 扩展了协同控制研究的领域和范围.
2)与现有人工势场方法[33−36]相比, 本文提出一种新的预定义时间人工势场策略, 不仅能避免智能体之间的碰撞和离群问题, 还能确保智能体在预设的碰撞和离群预警区内停留的总时间是有界的, 同时避免了通信路径损耗所引起的潜在的拓扑连通性问题.
3)与现有协同控制结果[37−40]相比, 本文基于自适应技术和反推控制方法, 设计一套通信路径损耗下多智能体系统固定时间编队协同控制方案, 解决了通信路径损耗所引起的非线性动态耦合问题, 实现了预期的固定时间编队协同任务. 此外, 与文献[49]相比, 本文提出一种具有自适应增益的新的分层滑模结构, 进一步改善了系统的动态性能.

图 1 距离−变权重示意图
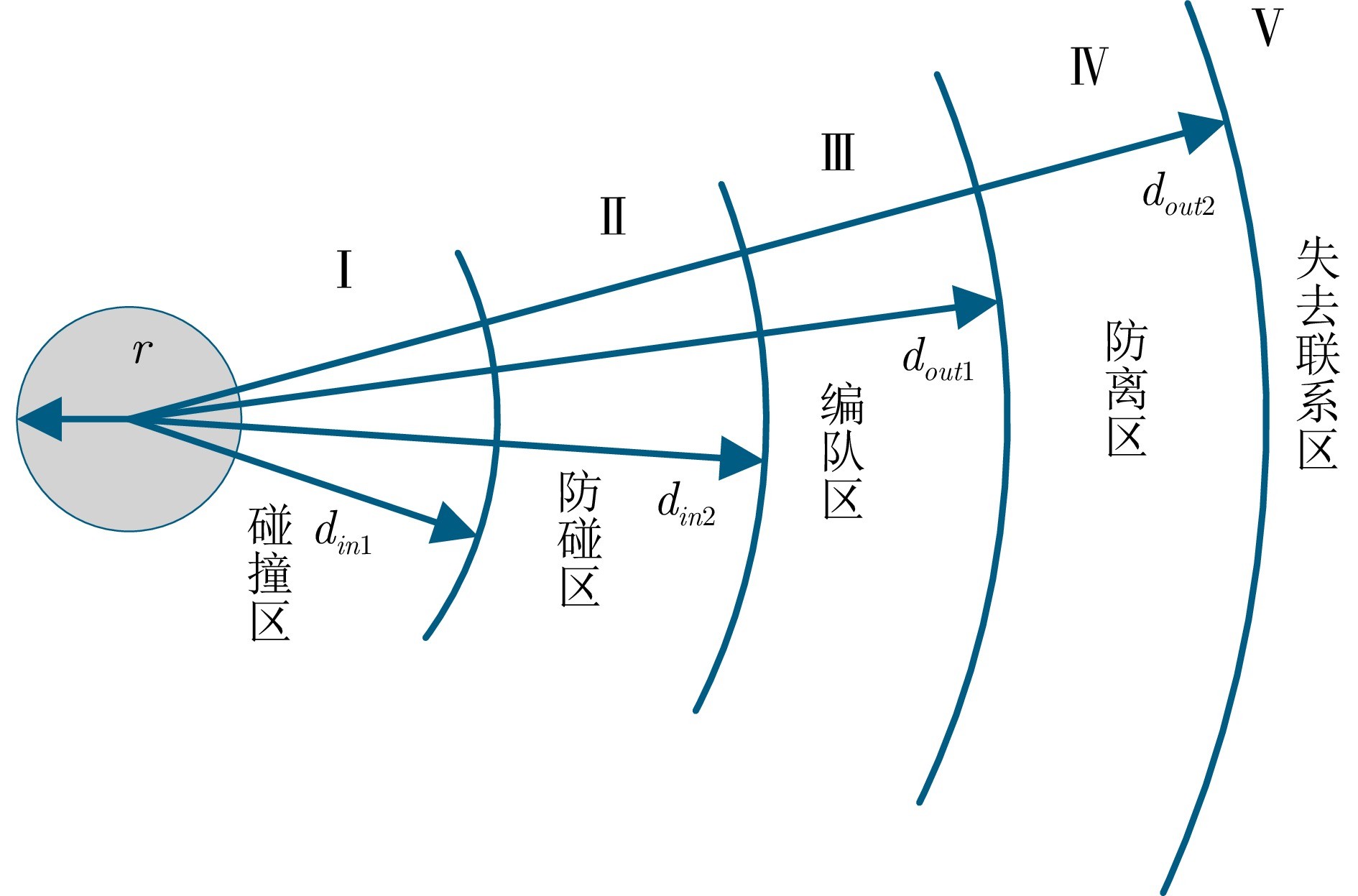
图 2 防碰防离人工势场
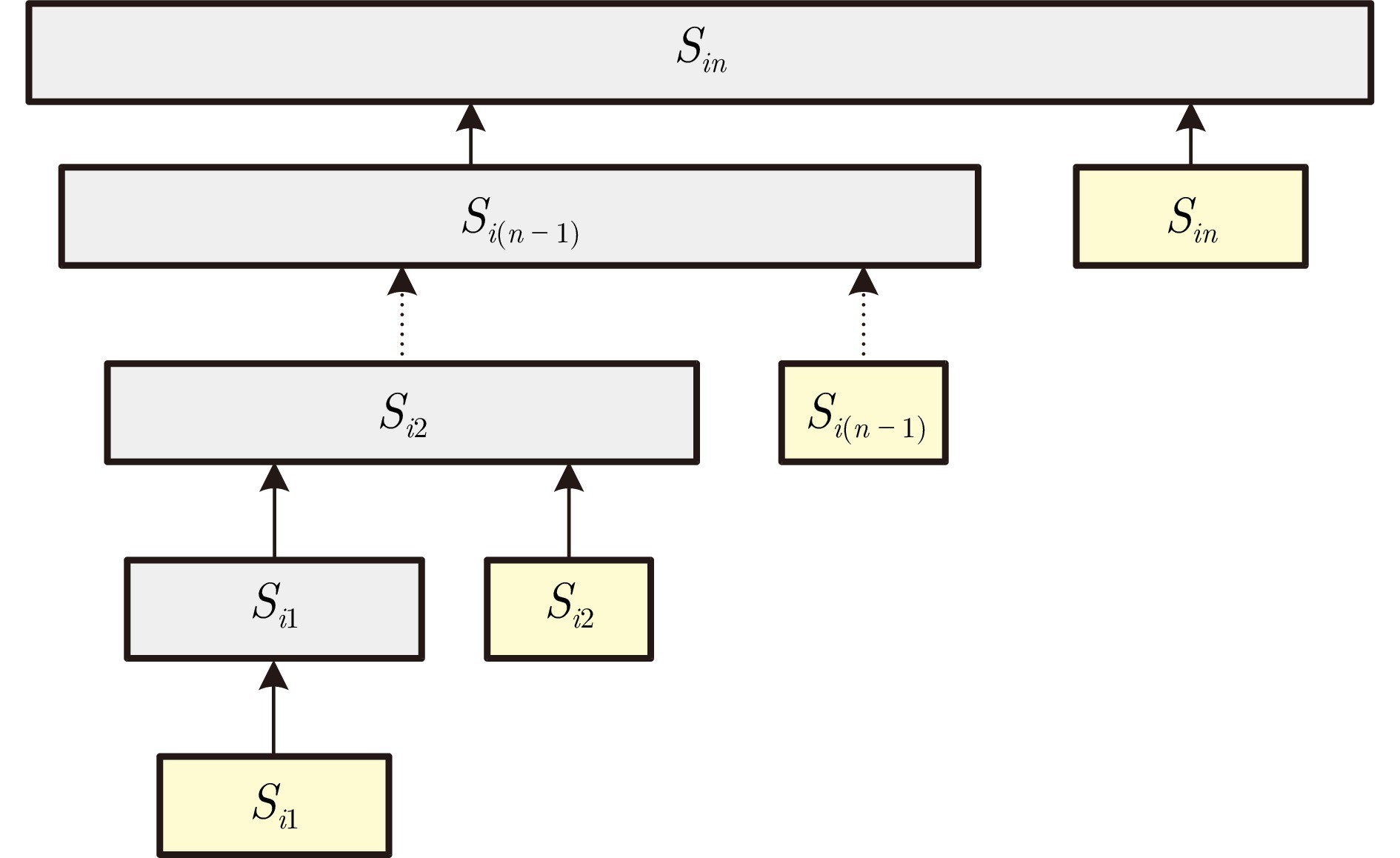
图 3 分层滑模面结构
本文研究了通信路径损耗下高阶非线性多智能体系统的固定时间编队问题. 首先所考虑的智能体间通信权重的变化与它们之间通信路径损耗相关, 距离越长路径损耗越大. 其次, 设计一个自适应增益的固定时间分层滑模面, 并开发一种自适应固定时间编队控制协议. 为解决编队中存在的防碰防离问题, 引入预定义时间人工势场, 并融入所设计的编队协议中. 基于李雅普诺夫理论, 证明了编队协议可以保证所有智能体可以在固定时间完成编队任务, 并且在过程中不会出现相碰与相离情况. 最后通过仿真验证编队协议的有效性. 事实上, 影响智能体之间的通信权重不仅取决于它们之间的距离, 网络延时、丢包、攻击都可能会产生影响, 我们将在未来的工作中继续考虑这些问题.
作者简介
杨海骄
安徽大学电气工程与自动化学院讲师. 2020年获得东北大学控制理论与工程专业博士学位. 主要研究方向为协同控制, 自适应控制, 有限时间控制, 多智能体系统的安全控制及其应用. E-mail: hjyang@ahu.edu.cn
刘安
安徽大学电气工程与自动化学院硕士研究生. 2023年获得南京工程学院学士学位. 主要研究方向为多智能体编队控制. E-mail: z23301070@stu.ahu.edu.cn
何舒平
安徽大学电气工程与自动化学院教授. 2011年获得江南大学控制理论与工程专业博士学位. 主要研究方向为随机系统控制, 强化学习, 应用系统建模, 信号处理和人工智能方法. 本文通信作者. E-mail: shuping.he@ahu.edu.cn
转载本文请联系原作者获取授权,同时请注明本文来自Ouariel科学网博客。
链接地址:https://wap.sciencenet.cn/blog-3291369-1483760.html?mobile=1
收藏