
引用本文
孙一仆, 陈鑫, 贺文朋, 佘锦华, 吴敏. 异构非线性多智能体系统无模型输出一致性控制. 自动化学报, 2025, 51(3): 604−616 doi: 10.16383/j.aas.c240459
Sun Yi-Pu, Chen Xin, He Wen-Peng, She Jin-Hua, Wu Min. Model-free output consensus control for heterogeneous nonlinear multi-agent systems. Acta Automatica Sinica, 2025, 51(3): 604−616 doi: 10.16383/j.aas.c240459
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c240459
关键词
非线性多智能体系统,无模型输出共识控制,微分同胚,输入输出反馈线性化,自适应动态规划
摘要
针对异构非线性多智能体系统(Multi-agent system, MAS)的输出一致性控制难题, 设计了一种基于同胚分布式控制协议的无模型方法. 通过将输出反馈线性化理论与自适应动态规划相结合, 可以在不需要精确系统模型的情况下实现非线性智能体的线性化, 简化分布式控制器的设计复杂性. 具体而言, 设计一种双层分布式控制结构, 在物理空间层通过无模型反馈线性化方法实现未知系统线性化, 在微分同构空间层利用线性控制技术进行分布式共识控制. 通过两个实验验证了所提方法在处理未知异构非线性多智能体系统中的有效性, 将传统的线性分布式控制方法扩展到未知非线性多智能体系统的控制器设计.
文章导读
在刚性航天器一致性[1]和欧拉−拉格朗日系统的编队控制[2]等应用场景中, 直接测量和反馈系统的输出变量更为方便和可靠. 例如, 在多无人车编队中, 通过全球定位系统(Global positioning system, GPS)等技术直接测量每辆车的位置和速度, 比估计和控制内部状态更简单易行[3]. 因此, 输出一致性跟踪控制在多智能体系统(Multi-agent system, MAS)的工程应用中更具实用性.
线性控制方法在传统多智能体控制理论中占据重要地位[4-5], 其通过将复杂的非线性系统线性化为多个局部线性系统来简化控制问题[6-8]. 然而, 异构非线性多智能体系统的高度非线性和动态特性使得这些方法难以有效应用. 具体来说, 线性控制方法在处理大范围动态变化和强耦合非线性特性时表现出较大局限性, 例如在多机器人协同任务中, 简化模型无法准确地反映各机器人不同的动力学特性, 导致控制精度和鲁棒性下降.
非线性控制方法直接处理系统的非线性特性, 通过Lyapunov方法[9-10]、反馈线性化[11-12]等理论设计控制策略. 尽管理论上能够解决线性方法的不足, 但其应用面临诸多困难: 需要精确的系统模型、设计和实现复杂, 特别是在异构多智能体系统中, 要求各智能体之间的协调和实时响应, 增加了计算量和实现难度[13]. 此外, 非线性控制方法在处理高维度系统和外界扰动时, 稳定性和鲁棒性也受到挑战.
无模型自适应动态规划方法作为一种数据驱动的控制策略[14]逐渐受到关注, 通过与环境交互, 基于奖励机制自主学习最优策略, 无需系统模型即可实现复杂任务的控制. Jiang等[15]提出一种数据驱动的自适应动态规划方法, 使用输入和输出序列作为基础状态的等效表示, 解决了部分可观测系统状态的离散线性多智能体系统的最优输出一致性控制问题. 对于部分未知动力学的严格反馈非线性多智能体系统, 文献[16]在输出调节理论下, 提出基于实测数据结合神经网络和自适应动态规划求解最优输出反馈控制的方法. 然而, 对于异构非线性系统的无模型输出一致性控制研究仍处于起步阶段.
无模型学习控制方法也存在明显不足: 自适应动态规划方法的训练过程对参数选择和奖励设计高度敏感, 可能导致策略的鲁棒性和稳定性不佳; 可解释性差, 使得控制策略的进一步调整变得困难; 在系统跟踪时变信号时, 自适应动态规划方法本身不具备预测未来状态的能力, 这使其更适合镇定控制而非跟踪控制.
混合控制策略利用不同方法的互补特性解决异构非线性多智能体系统的一致性控制问题[17]. 结合自适应动态规划与经典控制理论, 可以在数据驱动的基础上引入稳定性分析, 提升控制策略的可靠性[18]. 然而, 混合控制策略设计和实现难度大, 需在不同方法之间找到平衡点, 确保整体系统的稳定性和性能.
上述背景下, 本工作结合输入输出反馈线性化理论和自适应动态规划, 从简化分布式控制器设计、增加控制器可解释性、降低学习对奖励设计的敏感度的角度出发, 开发了异构非线性多智能体系统的无模型输出一致性控制方法. 具体来说, 通过构建一个同胚分布式两层控制结构, 将异构非线性多智能体系统的无模型输出一致性控制问题转化为两个问题进行求解: 在物理空间层中利用观测数据, 提出能够动态调整奖励信号的两阶段双启发式自适应动态规划方法实现非线性系统的无模型输入输出反馈线性化; 在同胚线性化空间层中, 基于线性化系统设计一致性分布式控制器, 实现被控多智能体系统的输出一致性控制. 本文的主要创新点和贡献如下:
1)现有分布式控制方法在处理异构多智能体输出一致性控制时[15-16], 因模型未知和非线性动态的影响, 会造成黎卡提方程或贝尔曼方程求解困难的问题. 为此, 本文提出一种基于无模型反馈线性化的同胚分布式控制协议, 不依赖精确模型的情况下实现输出一致性控制. 不同于传统无模型分布式控制方法, 分层分布式控制协议包含两层控制策略, 在物理空间层通过构建自适应动态规划算法求解无模型反馈线性化控制器, 将未知非线性多智能体系统转化为已知的线性系统. 结合同胚空间层的一致性控制协议, 该线性化系统可以根据协同任务的性能需求进行预设计或二次设计, 当控制任务发生改变时无需重新学习, 从而降低一致性策略设计难度.
2)解决物理空间层中反馈线性化控制器对精确模型的依赖问题是分层分布式方法实施的关键, 本文设计一种基于两阶段迭代学习的无模型自适应动态规划算法. 算法在值函数学习过程中引入目标依赖, 可以动态调整奖励信号以适应异构的智能体, 无需设计不同奖励信号, 同时通过一个双启发式评价网络实现线性化控制策略快速更新.
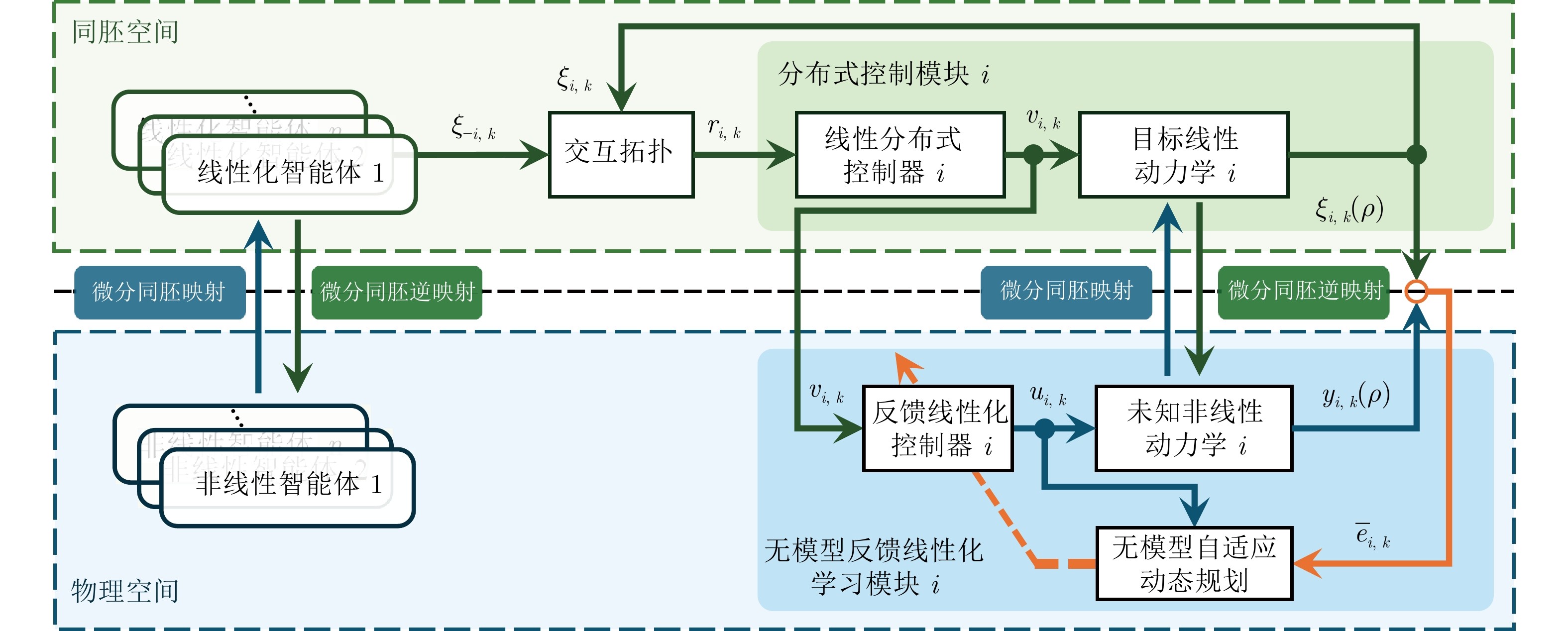
图 1 同胚分布式控制协议结构图
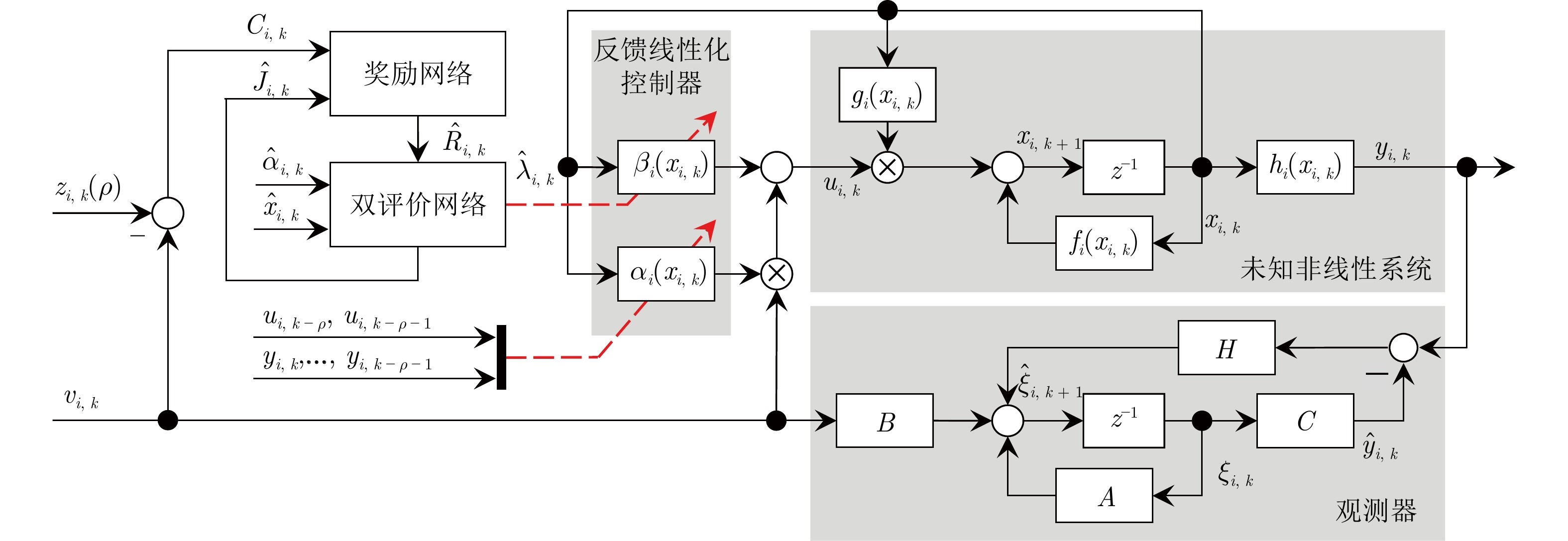
图 2 无模型反馈线性化学习模块
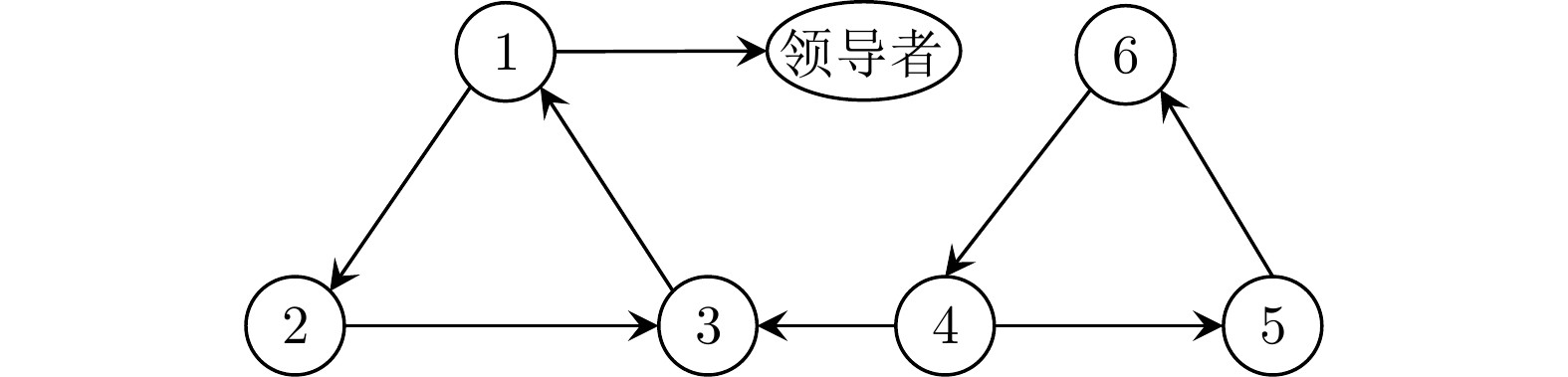
图 3 通讯拓扑
本文提出一种同胚分布式控制协议, 解决了异构非线性多智能体系统的无模型输出一致性控制问题. 结合输入输出反馈线性化理论和自适应动态规划技术, 实现了无需系统模型的非线性系统线性化. 通过将异构非线性多智能体系统转为预设的同构线性系统, 简化了分布式控制器的设计, 使得线性控制理论得以应用. 动态调整的奖励值和双阶段学习机制在训练过程中不断优化控制器, 增强了学习的稳定性和收敛速度. 实验结果表明, 各智能体的轨迹在所提方法下能够快速收敛到期望输出, 验证了控制策略的适应性和二次设计能力. 未来的研究将进一步讨论方法的泛化性, 考虑存在输入时滞、饱和、受限等情况, 扩展同胚分布式控制协议的适用范围, 以应对更复杂的实际应用场景.
作者简介
孙一仆
中国地质大学(武汉)自动化学院博士研究生. 主要研究方向为多智能体系统, 强化学习. E-mail: 20141000976@cug.edu.cn
陈鑫
中国地质大学(武汉) 自动化学院教授. 主要研究方向为智能控制, 过程控制, 机器人运动控制. 本文通信作者. E-mail: chenxin@cug.edu.cn
贺文朋
中国地质大学(武汉)自动化学院博士研究生. 主要研究方向为多智能体系统分布式控制. E-mail: wenpenghe@cug.edu.cn
佘锦华
日本东京工科大学教授. 主要研究方向为重复控制, 机电系统的高精度控制, 康复机器人, 计算智能的工业应用. E-mail: she@stf.teu.ac.jp
吴敏
中国地质大学(武汉) 自动化学院教授. 主要研究方向为过程控制, 鲁棒控制和智能系统. E-mail: wumin@cug.edu.cn
转载本文请联系原作者获取授权,同时请注明本文来自Ouariel科学网博客。
链接地址:https://wap.sciencenet.cn/blog-3291369-1483392.html?mobile=1
收藏