博文
负载质心位置对Gough-Stewart六自由度运动系统动态特性的影响
|||
在荷兰代尔福特大学SIMONA的网站上,你会见到一台先进的六自由度工程飞行模拟器。它有点与众不同,其模拟座舱呈流线型并采用了复合材料。据说这样做可以使负载质心降低,从而改善运动系统的动态特性,进而提高动感模拟的逼真度。然而,质心降低到多少才合适呢?是否越低越好呢?下面,我们试图回答这个问题。

图1 SIMONA Research Flight Simulator
首先我们必须对我们提出的问题进行形式化处理,也就是说要建立质心位置与运动系统动态性能之间的数学关系式。我们知道,运动系统的稳定性以及动态特性可以用它的六个无阻尼自然频率来描述。这里,我们认为负载为刚体,各支腿的特性完全一致,并忽略各支腿的柔性以及惯性参数的影响。如果我们能够把无阻尼自然频率写成质心位置h的函数,那么我们也许会得到一些有价值的结论。
标准Gough-Stewart六自由度运动系统可以用六个参数来描述,如图2所示。其中,ra,rb分别为上、下铰点分布圆半径,H为上平台相对于下平台的高度,h为负载质心相对于坐标原点的距离。 分别为上下平台各铰点所形成的六边形的短边所对应的半中心角。m为负载质量,Ixx,Iyy和Izz为负载相对于质心的转动惯量矩。
分别为上下平台各铰点所形成的六边形的短边所对应的半中心角。m为负载质量,Ixx,Iyy和Izz为负载相对于质心的转动惯量矩。
分别为上下平台各铰点所形成的六边形的短边所对应的半中心角。m为负载质量,Ixx,Iyy和Izz为负载相对于质心的转动惯量矩。
图2 标准Gough-Stewart六自由度运动系统
接下来,我们给出运动系统在中位时的无阻尼自然频率如下
 (1)
(1)式中ks为各支腿的刚度

显然Kyy和Kxx是h的二次函数,当
 (3)
(3)时,存在着极值。这里,n=ra/rb为上下铰点分布圆半径比。此时,运动系统各阶无阻尼自然频率最接近(如图3所示),各自由度之间的耦合也最小。可见,对应半径比n,负载质心并不是越低越好,而是必须满足式(3),动态特性才最好。考虑为零的情况,当n=1时,h*=-H/2;当n=1/2时,h*=0H。对于第一种情况,即半径比为1(工业上大多运动系统的半径比接近于1),我们发现只有负载质心位于平台以下大约为平台高度一半的时候,性能才最好。然而大多数工程师并没有注意到这一点,他们往往采用了比值接近于1的设计,并且把负载布置于平台之上,显然这样做必然造成运动系统存在较大的耦合。当然,把负载放在平台以下,需要考虑太多的因素,工程实现起来比较困难。为了既能够把负载放在平台以上,又能够减少耦合,只有选取n<1/2的情况了。
为零的情况,当n=1时,h*=-H/2;当n=1/2时,h*=0H。对于第一种情况,即半径比为1(工业上大多运动系统的半径比接近于1),我们发现只有负载质心位于平台以下大约为平台高度一半的时候,性能才最好。然而大多数工程师并没有注意到这一点,他们往往采用了比值接近于1的设计,并且把负载布置于平台之上,显然这样做必然造成运动系统存在较大的耦合。当然,把负载放在平台以下,需要考虑太多的因素,工程实现起来比较困难。为了既能够把负载放在平台以上,又能够减少耦合,只有选取n<1/2的情况了。以上的分析,并没有考虑整个工作空间即全域的情况,但是由于其动态特性在工作空间内是连续的,很容易验证该结论在全局上也是适用的。
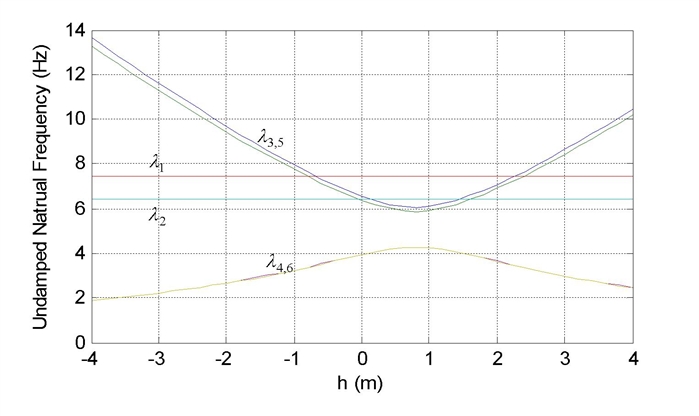
图3某飞行模拟机六自由度运动系统中位时的无阻尼自然频率
H. Z. Jiang, J. F. He, Z. Z. Tong, Characteristics analysis of joint space inverse mass matrix for the optimal design of a 6-DOF parallel manipulator, Mechanism and Machine Theory 2010,45(5): 722-739.
https://wap.sciencenet.cn/blog-333510-384723.html
上一篇:我的祖母——撑起生命的链条
下一篇:六自由度并联机构——圆柱单叶双曲面与六自由度并联机构