博文
有向图中网络Euler-Lagrange系统无需相对速度信息的群一致性
|
引用本文
曹然, 梅杰. 有向图中网络Euler-Lagrange系统无需相对速度信息的群一致性. 自动化学报, 2018, 44(1): 44-51. doi: 10.16383/j.aas.2018.c160637
CAO Ran, MEI Jie. Group Consensus for Networked Euler-Lagrangian Systems Under a Directed Graph Without Relative Velocity Information. ACTA AUTOMATICA SINICA, 2018, 44(1): 44-51. doi: 10.16383/j.aas.2018.c160637
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2018.c160637
关键词
多智能体系统,Euler-Lagrange系统,群一致性,自适应控制
摘要
在非对称有向图中,研究网络Euler-Lagrange系统的群一致性问题.每组内的智能体均为合作关系,而组间智能体则可以为合作关系或竞争关系.为了实现群一致性,假设组与组之间是无环连接的且系统有向图满足入度平衡条件.考虑到智能体间相对速度信息难以精确测量的实际情形,设计无需相对速度信息的分布式自适应控制算法,实现网络Euler-Lagrange系统的群一致性.最后通过仿真分析验证所设计算法的有效性.
文章导读
在过去10多年里, 关于多智能体系统的协同控制问题受到了国内外的广泛关注, 例如编队问题[1]、聚集问题[2]、一致性问题[3]等.系统的一致性要求系统内所有智能体收敛于同一值.而在实际中, 面对复杂任务时, 常常需要系统的各部分分工合作, 这就常常要求不同的部分收敛于不同值.群一致性问题将系统中的所有智能体分为几组, 并要求同一组的所有智能体收敛于同一值, 而组与组之间则可以不同, 这使得群一致性在处理一些复杂问题时更加适用.
在系统动力学模型采用线性常微分方程以及拓扑结构为无向图的情况下, Wu等[4]使用牵制控制法[5]设计线性负反馈控制器使得系统实现群一致性, 在此方法下实现群一致需要组间连接强度足够大. Xu等[6]使用牵制控制法设计分布式自适应控制器, 并在假设拓扑图的Laplacian矩阵中的每个子块均行和列和为零的情况下实现了群一致性.基于有向拓扑结构, Xia和Cao [7]给出了三种情况下实现群一致性的条件: 1)采用的动态模型不同; 2)连接存在时滞因素影响; 3)组与组之间存在竞争关系.与使用牵制控制法的情况类似的是这两种方法均需要可以得到系统的精确解, 故对于强非线性的Euler-Lagrange系统不能直接使用.在Yu等[8]提出的入度平衡条件前提下, Qin等[9]放宽了实现群一致性的代数条件, 并提出了分组时无环分割的概念, 设计了分布式反馈控制器使得不同组的智能体最终收敛于不同的轨迹. Wen等[10]在智能体被分为两组且它们的动力学分别为一阶和二阶积分器的情况下, 设计了一种使用邻居信息的分布式控制器, 给出了在固定拓扑和切换拓扑下实现群一致性的充分条件.另外一些研究采用的多智能体系统的动力学是Euler-Lagrange方程, 该系统在实际中有着大量的应用[11], 例如无人机、工业机器人、走路机器人等.因此, 网络Euler-Lagrange系统中的分布式协调控制也引起了广泛关注.研究内容包括一致性问题[12-13]、跟踪问题[14-15]、包含控制问题[16-17]等.在关于此类系统群一致性方面的现有研究中, Hu等[18]从两个组的情况出发, 设计了控制器使得系统在固定拓扑和切换拓扑的结构下分别实现了群一致性, 并推广到多个组的情况, 然而其提出的代数条件较难实现. Liu等[19-20]运用了一种新的分解方法来得到Laplacian矩阵的特殊形式, 并结合输入状态稳定来解决群一致性问题.在上述的研究中, 所设计的控制器均使用了相对速度信息, 而实际中相对速度信息较难精确得到.
结合之前的研究结果, 本文在拓扑结构为有向图的情形下研究网络Euler-Lagrange系统的群一致性, 组的分割方式与文献[9], 文献[19-20]中普遍采用的无环分割方式相同, 设计了无需相对速度信息的分布式算法, 并在最后给出了仿真模拟来验证研究结论.
与文献[4-10]中考虑的线性多智能体动力学相比, 本文采用的动力学模型是非线性的Euler-Lagrange方程.与文献[18-20]中研究的网络Euler-Lagrange系统群一致性相比, 本文考虑到智能体间相对速度信息难以直接测量的实际情形, 提出了无需相对速度信息的群一致性算法.与文献[13, 17, 21]中研究的网络Euler-Lagrange系统的一致性相比, 本文研究的是系统的群一致性问题.在文献[21]中, 智能体间信息传输权重均为正, 而本文中不同组间智能体的信息传输权重可正可负.上述特点导致文献[21]中 Lii , i=2,⋯,d, 均为非奇异的 M-矩阵, 而在本文中, 由入度平衡条件可知, Lii , i=2,⋯,d, 均含有零特征值.这使得本文中的证明过程也与文献[22]不同.
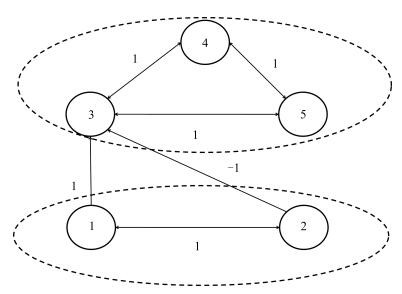
图 1 智能体间的拓扑关系
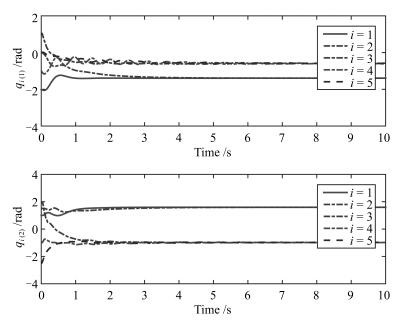
图 2 有向拓扑图下智能体位置状态信息
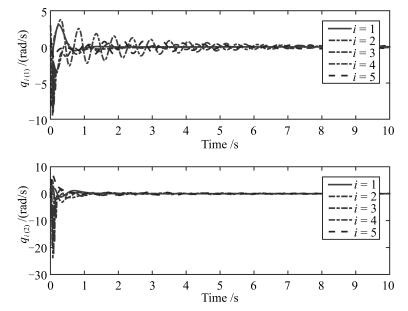
图 3 有向拓扑图下智能体速度信息
本文主要研究了当系统拓扑结构为有向图时网络Euler-Lagrange系统的群一致性问题.在系统参数不确定时, 通过引入辅助变量构建状态方程, 设计了无需相对速度信息的分布式自适应控制律, 从而避免了实际中相对速度信息精度难以保证的情形.在所设计的控制律的控制作用下, 系统中每一组的智能体的状态信息均可以收敛于同一点, 而组与组之间的收敛点可以不同, 从而实现了群一致性.最后通过仿真验证了所提算法的有效性.
作者简介
曹然
哈尔滨工业大学(深圳)机电工程与自动化学院硕士研究生.2015年获得哈尔滨工程大学自动化专业学士学位.主要研究方向为非线性多智能体系统的协调控制.E-mail:crhgc2011@hotmail.com
梅杰
哈尔滨工业大学(深圳)机电工程与自动化学院副教授.主要研究方向为多智能体系统分布式控制及其在编队飞行器中的应用.本文通信作者.E-mail:jmei@hitsz.edu.cn
https://wap.sciencenet.cn/blog-3291369-1424842.html
上一篇:一种基于分类回归树的无人车汇流决策方法
下一篇:中国科学院自动化研究所蒲志强研究员团队:面向真实比赛的足球博弈决策