博文
一种基于分类回归树的无人车汇流决策方法
|
引用本文
苏锑, 杨明, 王春香, 唐卫, 王冰. 一种基于分类回归树的无人车汇流决策方法. 自动化学报, 2018, 44(1): 35-43. doi: 10.16383/j.aas.2018.c160457
SU Ti, YANG Ming, WANG Chun-Xiang, TANG Wei, WANG Bing. Classification and Regression Tree Based Traffic Merging for Method Self-driving Vehicles. ACTA AUTOMATICA SINICA, 2018, 44(1): 35-43. doi: 10.16383/j.aas.2018.c160457
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2018.c160457
关键词
汇流决策,遗传算法,分类回归树,交通流仿真
摘要
决策规划是无人驾驶技术中的重要环节.由于道路结构变化或障碍物引起的车辆被动换道多采用基于逻辑规则或优化算法的决策方式.本文以通行量为优化目标,提出一种基于分类回归树(Classification and regression tree,CART)的汇流决策方法.依据交通流参数,选择大量具有代表性的车辆汇流场景.对场景中车辆的汇流决策序列进行编码,采用遗传算法搜索使得通行量最大的决策方案.将寻优获得的大量汇流决策序列作为样本,训练分类回归树.选取车辆自身信息及与周围车辆的关系等以描述环境特征,运用分类回归树描述环境特征与决策结果的映射关系,获得一种通行量最优的汇流决策方法.在软件中进行仿真实验,对比既有方法,基于分类回归树的汇流方法能够有效减少汇流行为对车流的扰动,在大流量情形下依旧能保持较高的通行效率.此外,该方法对实际实施中可能存在的环境感知误差,如定位误差,有一定的鲁棒性.
文章导读
诸如道路临时施工和车道减少等道路瓶颈处, 由于被阻断车道中的车辆需要通过汇流来继续行程, 导致原本有序的车流产生扰动.根据三相交通流理论[1], 被动引发的换道行为必然导致交通流的大幅扰动, 交通状态从同步流转变成拥堵流, 且拥堵状况将向车流上游扩散, 导致交通瘫痪, 通行效率急剧下降[2].此外, 汇流时的换道行为极易引发车辆事故, 带来更大的损失.
在无人车技术及车间通信技术快速发展的背景下, 交通控制从人-车-路闭环转变为车-路闭环, 提高了车辆协作的效率, 提升了安全性和通行效率.根据系统架构, 基于无人车的交通流控制可分为集中式和分布式两大类.集中式控制依赖路边的主控电脑, 通过车-路通信收集汇流点附近较大范围内车辆的状态信息, 再依据这些全局信息对车辆的行为进行决策, 并返送回被控车辆执行. Cao等提出的基于滚动优化的汇流控制方法[3], Marinescu等提出的基于空间槽的汇流控制方法[4], Rios-Torres等提出的最优在线交通流控制方法[5]以及Awal等提出的最优汇流策略[6]均基于集中式控制架构.但在实际应用中受现有通信技术的限制, 集中式控制所要求的大量和稳定的数据通信往往得不到满足, 致使控制效果变差.多车集中控制也使得主控电脑运算负荷巨大.而分布式控制依赖车载传感器及车-车通信获取环境信息, 由行车电脑自主决策.这种架构有效减少网络流量及运算负荷, 有较高的可实施性. Wang等[7]提出的主动式汇流方法采用了此架构.
在决策算法方面, 已有的研究主要采用基于逻辑规则的方法或基于函数模型的最优化算法.前述Wang提出的方法采用了依据逻辑规则评估是否换道.该方法易于实现, 有极高的实时性, 但其逻辑规则难以描述复杂的车辆交互关系, 在车流稍大的情况下汇流效率不高. Rios-Torres, Cao以及国内高校的陈思曼等[8]均提出了通过建立车辆的状态微分方程求解最优化问题来协调车辆的汇流方法.该方法适合于集中式控制, 且对汇流点浮动的情况求解过程复杂, 算法实时性较差. Kita在文献[9]中提出了基于博弈论的汇流方法, 建立每种决策的收益矩阵, 评估收益作出决策.该方法虽然适合于分布式控制架构, 但其难以获得通行量方面的收益信息, 从而难以在通行量方面提升汇流效果.
鉴于基于逻辑规则的方法对问题模型的刻画比较粗糙, 控制精准度较差; 基于函数模型的决策方式过于依赖有精确参数的物理模型, 且其在模型精确性方面往往不如基于概率模型的算法.因此, 本文提出了基于优秀决策样本的统计学习方法获得更为丰富和细腻的决策逻辑.
在优秀决策样本采集方面, Li等在文献[10-12]中指出稠密交通流情况下遍历解空间往往无法实现, 而可以采用启发式的搜索算法获得车辆决策在某一指标方面的近似最优解.鉴于粒子群算法没有简单有效的措施防止陷入局部最优, 蚁群算法计算开销大而本文求解空间维数较高, 因此选择启发式的遗传算法, 该方法在搜素本文离散解空间的情形下有较高的适用性.
有监督的统计学习算法中, KNN (K-nearest neighbor)算法对参数 k 敏感, 针对本文研究的问题没有相关前期工作可以提供参数选择的经验.而朴素贝叶斯有各个特征相互独立的前设条件, 本文选取的车辆环境特征关联性较大, 与假设相悖. Weng等[13]曾采用分类回归树模型拟合了人类驾驶员在交通瓶颈处的汇流行为, 获得了较高的拟合度.因此, 本文选择了约束少、分类速度快和准确性高的分类回归树方法作为汇流决策的模型.并通过对比Wang提出的方法, 验证汇流方案的高效性.

图 1 汇流场景
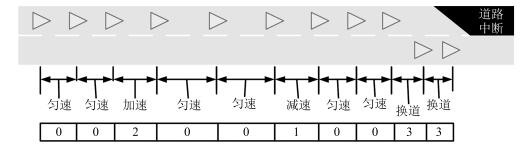
图 2 汇流决策时间序
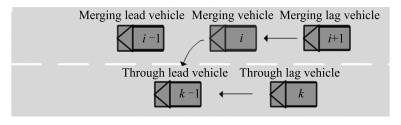
图 3 环境特征描述示例
本文通过决策树的方法, 大量学习优秀汇流案例中的决策方法, 使得车辆能够不仅根据临近车道的局部交通状况做出决策, 还能根据本车道局部交通状况做出更为灵活的调整, 作出使群体最优的决策.实验表明, 本文所提出的汇流方法确实能够尽可能降低汇流行为对车流的扰动, 即使通行量较大的情形下也能够保证较高的汇流效率, 缩短了车辆的平均旅行时间.与基于全局信息的方法相比, 不仅在通行效率方面可以与之媲美, 而且在控制架构的实施效力方面有极大的优势.因此, 基于分类回归树的汇流方法是一种通行量及可实施性均优的决策方式.此外, 本文还验证了实际应用中传感器误差对本方法的影响.虽然会使汇流效率略微下降, 但不影响其相对其他分布式汇流方法的汇流效率优势.至于通信时延及丢包等对汇流效果的影响更为复杂和多变, 由于篇幅限制会在未来工作中进一步完善.
作者简介
苏锑
上海交通大学智能车实验室硕士研究生.2014年获得河海大学学士学位.主要研究方向为协作驾驶算法和无人车队.E-mail:teenie_su@139.com
王春香
上海交通大学机械与动力工程学院副教授.1999年在哈尔滨工业大学获得博士学位.主要研究方向为移动机器人, 自动驾驶及高级驾驶辅助.E-mail:wangcx@sjtu.edu.cn
唐卫
上海交通大学自动化系博士研究生.2008年在南京理工大学获得学士学位, 2011年在上海航天技术研究院获得硕士学位.主要研究方向为协作驾驶和多智能体.E-mail:tangwei_327@163.com
王冰
上海交通大学自动化系高级工程师.1997年在上海交通大学获得工学博士学位.主要研究方向为嵌入式控制, 工业自动化, 自动导引车.E-mail:bingwang@sjtu.edu.cn
杨明
上海交通大学智能车研究所主任, 自动化系教授.1999年和2003年在清华大学获得计算机科学硕士和博士学位.主要研究方向为自动驾驶, 协作驾驶, 移动机器人, 机器视觉和高精细地图.本文通信作者.E-mail:mingyang@sjtu.edu.cn
https://wap.sciencenet.cn/blog-3291369-1424841.html
上一篇:国家自然科学基金自动化领域数据分析与研究热点变化
下一篇:有向图中网络Euler-Lagrange系统无需相对速度信息的群一致性