博文
高速动车组数据驱动无模型自适应积分滑模预测控制
|
引用本文
李中奇, 周靓, 杨辉. 高速动车组数据驱动无模型自适应积分滑模预测控制. 自动化学报, 2024, 50(1): 194−210 doi: 10.16383/j.aas.c230074
Li Zhong-Qi, Zhou Liang, Yang Hui. Data-driven model-free adaptive integral sliding mode predictive control for high-speed electric multiple unit. Acta Automatica Sinica, 2024, 50(1): 194−210 doi: 10.16383/j.aas.c230074
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c230074
关键词
列车自动驾驶,数据驱动控制,速度跟踪,积分滑模控制,模型预测控制,全格式数据模型
摘要
同许多复杂系统一样, 动车组(Electric multiple unit, EMU) 运行过程也具有多变量、强耦合以及非线性等特性, 这严重影响着列控系统的性能. 针对包含外部扰动的动车组自动驾驶系统, 提出一种新型的多输入多输出(Multi-input-multi-output, MIMO) 数据驱动积分滑模预测控制(Integral sliding mode predictive control, ISMPC)算法. 首先, 该算法基于与动车组运行过程等效的全格式动态线性化(Full format dynamic linearization, FFDL)数据模型, 设计一种离散积分滑模控制(Integral sliding mode control, ISMC) 律. 为了使系统能够获得更高的输出跟踪误差精度, 利用模型预测控制(Model predictive control, MPC) 代替ISMC的切换控制, 进一步推导出ISMPC算法. 同时, 通过对FFDL 数据模型的未知扰动、参数误差等不确定项进行延时估计, 提升了算法的控制性能和对系统的等价描述程度. 在提供两种算法的稳定性证明分析之后, 以实验室配备的 CRH380A 型动车组仿真实验台对提出的ISMC和ISMPC算法进行仿真测试, 并与其他方法进行对比, 仿真结果表明ISMPC算法控制性能较好, 动车组各动力单元速度跟踪误差均在 ±0.132 km/h 以内, 满足列车的跟踪精度需求; 控制力和加速度分别在[−52 kN, 42 kN] 和 ±0.9249 m/s2 以内且变化平稳.
文章导读
高速动车组 (Electric multiple unit, EMU) 是由拖车和电力机车组成的动力分布式列车, 它已经成为人们日常生活中最重要的交通工具之一. 但随着动车组运行速度越来越快、运行环境越来越复杂多变, 其车辆之间的非线性效应也越来越显著[1-2]. 在这种情况下, 仅凭借列车司机手动操作无法保证动车组的安全性和其他性能要求. 因此, 进一步开发列车自动驾驶系统以实现动车组高效运行是非常必要的[3]. 可靠性高、跟踪效果好的控制器是列车自动驾驶系统的核心, 它是实现列车安全、准点、舒适和停车精度等要求的关键. 针对动车组控制问题, 国内外学者已经提出了许多先进的控制方法, 从模型的角度出发, 大体上可以分为基于模型和基于数据驱动的控制方法[4]. 其中基于模型的控制方法研究大多数是从牛顿力学定律出发, 通过引入一些假设条件, 推导出列车的机理模型从而设计控制方案[5-7]. 这种思路对单质点列车模型尚且有效, 但研究对象是更接近实际情况的多质点动车组系统时则较为困难. 同许多复杂系统一样, 动车组实际运行过程具有多变量、强耦合以及非线性等特性, 使得机理模型的建立异常困难. 针对多质点动车组建模难的问题, 许多研究开始使用数据驱动建模的方法[8-13]. 首先设立模型结构, 将采集到的各个车厢的输入输出数据通过神经网络训练[8-9]、聚类分析[10-12]、系统辨识[13] 等方法获取模型参数, 最后对所得模型设计控制方案. 虽然数据驱动建模的方法能有效地降低列车系统的非线性和耦合关系, 但是其前提是获取列车的模型结构 (输入输出阶数和影响较大的非线性项); 其次, 各个车厢的输入输出数据不仅数量众多, 而且具有较大的偶然性 (由环境因素、系统内扰、执行器故障等因素导致).
综上所述, 动车组模型中的基本阻力系数、附加阻力和耦合关系由于诸多不确定因素的影响, 导致精确数学模型无法得到; 另外, 即使建立了简化过后的多质点模型, 设计控制器时也必然要考虑到解耦, 这无疑增加了计算量和设计难度. 因此本文结合动态线性化 (Dynamic linearization, DL) 技术、离散积分滑模控制 (Integral sliding mode control, ISMC) 和模型预测控制 (Model predictive control, MPC) 的优势, 使得它们能共同工作, 并更好地应用于动车组运行系统, 具有重要的理论研究意义和实际应用价值.
侯忠生[14]提出的无模型自适应控制 (Model-free adaptive control, MFAC) 拉开了 DL 技术的序幕. 其大体思想是在系统每个工作点处建立一个虚拟等价的数据模型, 根据系统复杂程度可分为紧格式动态线性化(Compact format dynamic linearization, CFDL)、偏格式动态线性化 (Partial format dynamic linearization, PFDL) 和全格式动态线性化 (Full format dynamic linearization, FFDL) 数据模型. 这些数据模型仅依赖被控对象输入输出数据, 通过在线估计系统的伪偏导数 (伪梯度向量或伪雅可比矩阵) 并最优化系统超前一步输出误差, 即可实现数据模型参数的在线更新. 随着相应理论的不断发展与完善, 基于 DL 数据模型的控制方法已经在许多领域得到了广泛应用[15-18]. 除了奠基者 MFAC 之外, 基于 DL 技术的离散滑模控制 (Discrete sliding mode control, DSMC) 方法亦受到大量关注, 学者们在基于数据的建模与优化、数据驱动滑模控制方法改进及参数优化等方面开展了大量的研究. 文献[19] 基于 DL 技术和 DSMC 指数趋近律, 首次提出了无模型自适应准滑模控制方法, 并进行了对应的数值仿真实验, 但没有考虑实际系统中的扰动等不确定性的影响. 在文献[19] 的基础上, 文献[20] 利用径向基神经网络来估计系统的广义扰动, 提出了基于 CFDL 数据模型的自适应滑模控制律, 并将其推广至多输入多输出(Multi-input-multi-output, MIMO) 非线性系统, 取得了较好的控制效果. 但随着系统阶数的增多, 滑模控制器数量亦会成倍增多. 文献[21] 基于指数趋近律的数据驱动离散滑模控制方法, 对智能汽车的速度和位置进行跟踪控制, 响应速度和鲁棒性均有所提高. 文献[22-23] 充分结合 MFAC 和 DSMC 方法的优点设计复合控制器, 其中 MFAC 方法能降低控制器对系统模型信息的依赖, 而 DSMC 方法能补偿系统未知外界扰动和未建模动态等不确定性的影响, 但复合控制器的稳定性还有待证明. 上述方法中, 滑模控制律的设计均采用了指数趋近律的处理方法, 系统中存在明显的抖振现象. 而且, 文献[20] 中径向基神经网络有较多参数, 加上神经网络的初始权值取随机数, 容易导致控制品质下降.
MPC 已成功应用于过程工业的各个领域. 然而, 对于受连续干扰的系统, 仅靠 MPC 无法提供令人满意的效果. 考虑到 DSMC 方法的鲁棒性, 一些学者尝试将这两种方法结合起来. 文献[24] 提出了一种基于积分终端滑模控制和 MPC 的控制方案, 使系统在外界干扰下依然能保持良好的鲁棒性. 文献[25] 采用 MPC 和 ISMC 实现机械手运动的分层控制. ISMC 用于补偿系统非线性影响, MPC 能对状态和输入进行约束. 针对受外界干扰的离散时间多输入多输出非线性系统, 文献[26] 提出了一种新的基于输出的离散时间积分滑模预测控制 (Integral sliding mode predictive control, ISMPC) 方案, 用 MPC 代替了 ISMC 的切换控制.
受上述文献的启发以及考虑动车组实际运行情况, 本文首次针对包含外部扰动的 MIMO 动车组系统, 提出了一种新的数据驱动离散积分滑模预测控制算法. 所提算法基于更符合列车运行特性的 FFDL 数据驱动模型, 构建了一种新的 ISMC 控制律. 为了将系统状态驱动到具有最优运动轨迹的滑模面上, 用 MPC 代替 ISMC 的切换控制. 这使得 ISMPC 能够获得更高的输出跟踪误差精度. 在满足一些合理假设的情况下, 给出了上述两种方法的严格证明过程. 最后, 以实验室配备的 CRH380A 型动车组仿真实验台对本文提出的 FFDL-ISMC 和 FFDL-ISMPC 方法进行仿真测试, 比较了两种控制策略的优劣性.
本文的具体贡献主要体现在 4 个方面:
1) 提出了新型的 MIMO 离散 ISMC 和 ISMPC 算法, 相较于文献[22-23]的方法, 系统抖振现象得到了缓解; ISMC 抖振现象良好主要是因为其有切换控制, 并使用饱和函数 sat 代替符号函数 sgn; 而 ISMPC 是因为其在滑模函数中存在两个误差积分权重因子, 在跟踪误差和抖振现象中做了折中选择. 另外, 利用一步延时估计动车组系统参数误差、扰动等不确定因素, 实现了较为高效的非线性控制.
2) 为提高控制精度, 基于 FFDL 数据模型, 结合已设计的 ISMC 和 MPC, 进一步推导出积分滑模预测控制方案. 与现有组合算法相比, 本文的算法不依赖动车组动力学模型, 是一种数据驱动控制算法.
3) 与文献[15-17, 27]采用的 CFDL 数据模型相比, 本文采用的 FFDL 方法综合考虑下一时刻输出变化量与固定长度滑动时间窗口内的输入输出之间的关系. FFDL 数据模型对系统的结构、参数的时变性不敏感.
4) 与已有将 DL 技术运用在列车上的文献[15, 28]相比, 本文的被控对象为多动力单元列车, 更符合实际运行要求. 本文所提的方法丰富了列车运行控制理论, 可以推广到其他型号的列车系统中 (14 动 2 拖的 CRH380AL、4 动 4 拖的 CRH380B、3 ~ 5 节编组的 TR08 型磁浮列车).
本文的主要结构如下: 第 1 节给出动车组多动力单元模型结构 (仅为列车运行仿真提供数据支持); 第 2 节和第 3 节分别提出基于 DL 技术的 ISMC 和 ISMPC 方法, 并对其稳定性进行严格的证明; 第 4 节和第 5 节分别是仿真分析和总结展望.
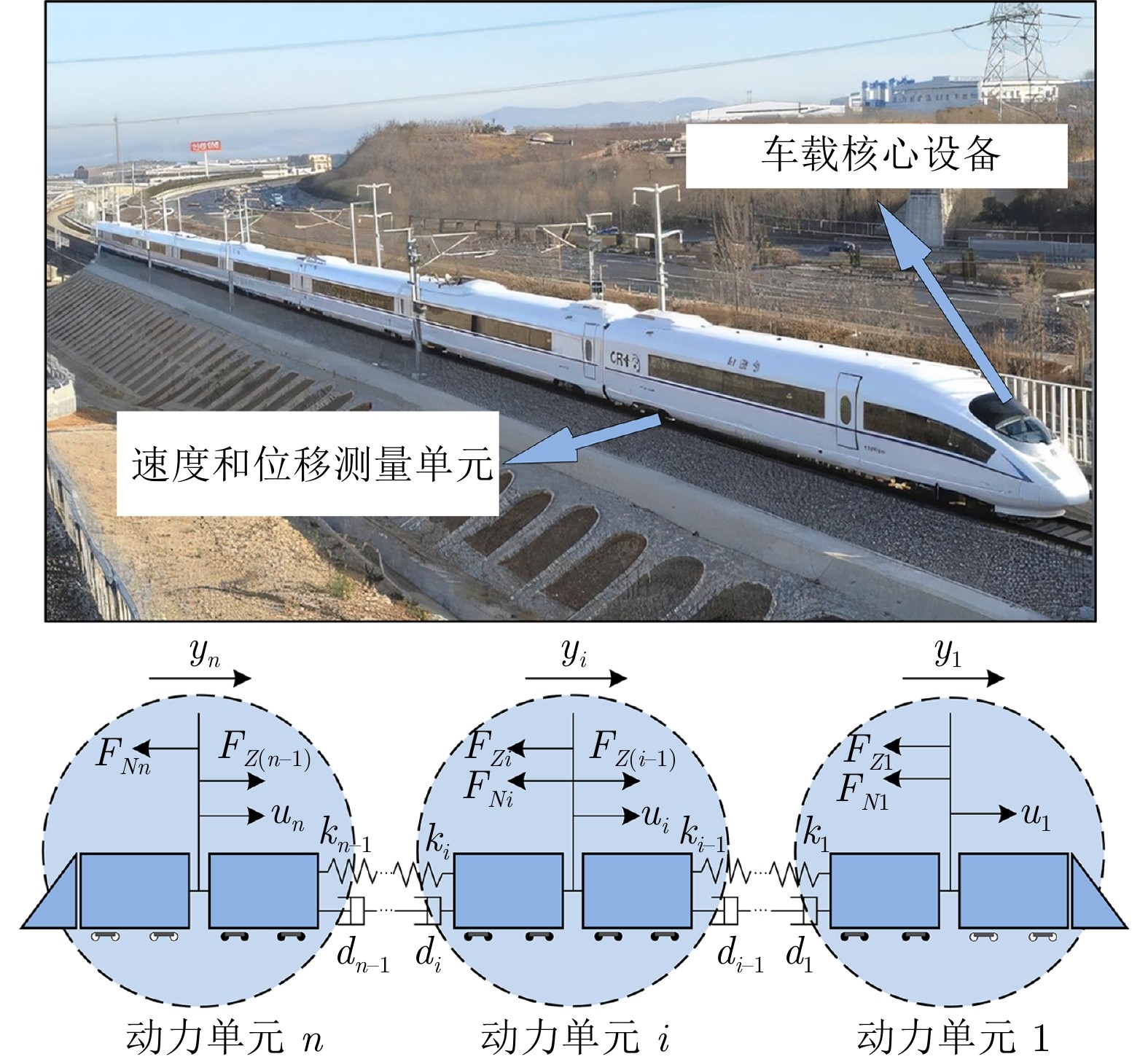
图 1 动车组运行过程动力学描述

图 2 CRH380A 型动车组模拟实验台
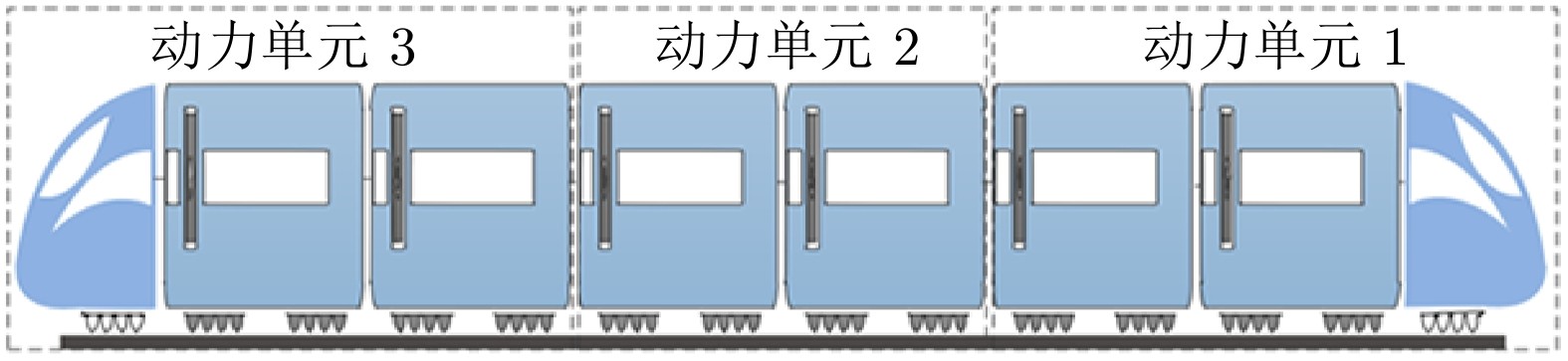
图 3 CRH380A 型动车组动力单元分布
本文首次针对包含未知外部扰动的动车组 MIMO 系统, 提出一种新的数据驱动离散积分滑模预测控制算法. 所提算法基于更符合列车运行特性的 FFDL 数据驱动模型, 构建了一种新的 ISMC 控制律. 为了将系统状态驱动到具有最优运动轨迹的滑模面上, 用 MPC 代替了 ISMC 的切换控制. 在满足一些合理假设的情况下, 给出了上述两种算法的严格证明过程. 最后, 以实验室配备的 CRH380A 型动车组仿真实验台对本文提出的 ISMC 和 ISMPC 算法进行仿真测试. 通过与 MFAC 和 GPC 对比, 仿真结果表明:
1) ISMPC 实现了比 ISMC、MFAC 和 GPC 方法对给定速度−位移曲线更高精度的跟踪控制, 误差范围在[−0.121 km/h, 0.132 km/h] 之间, 满足列车速度误差要求, 确保列车安全准时运行;
2) ISMPC 算法控制力变化更平稳, 各动力单元加速度变化范围均在 [−0.9249 m/s2, 0.8187 m/s2] 之间, 满足乘客的舒适度要求;
3) 由于用 MPC 代替了 ISMC 的切换控制, ISMPC 相较于 ISMC 算法, 系统存在一定的抖振现象, 实际工程中应该在抑制抖振与收敛性之间折中选择;
4) ISMC 相比于 ISMPC, 跟踪性能会差一些, 但是由于切换控制的存在, 它的抖振情况又比 ISMPC 要好; ISMPC 所使用的方法是基于 FFDL 数据模型的 MPC 方法, 因此也是数据驱动的方法. 由于参数矩阵是时变的, 在使用 MPC 时则需要进行参数预测处理或者使用向后(与预测步数一致)的参数值进行等效替代, 控制性能提升的同时复杂度也相应地增加了; 此外它的抖振现象比 ISMC 要明显. 如何使得该算法在跟踪性能良好的情况下无抖振现象, 将作为作者未来的工作重心.
进一步, 在本文的基础上, 作者将在未来进行以下研究:
1) 在引入外部干扰的基础上, 考虑不同车厢类型和延时影响;
2) 考虑采用神经网络方法对本文提出的控制算法进行参数优化;
3) 近年来, 许多学者开始关注列车多智能体系统的协调控制和编队控制问题. 其目标是通过系统中各智能体的相互协作, 提高运行效率, 防止事故发生[32-33]. 因此, 在未来的工作中, 作者将研究具有多智能体的高速列车无模型自适应控制.
作者简介
李中奇
华东交通大学电气与自动化工程学院教授. 主要研究方向为列车运行过程建模与自适应控制. 本文通信作者. E-mail: lzq0828@163.com
周靓
华东交通大学电气与自动化工程学院博士研究生. 主要研究方向为列车运行过程建模与无模型自适应控制. E-mail: zl971125@163.com
杨辉
华东交通大学电气与自动化工程学院教授. 主要研究方向为复杂系统建模、控制与运行优化. E-mail: yhshuo@263.com
https://wap.sciencenet.cn/blog-3291369-1421243.html
上一篇:基于像素对比学习的图像超分辨率算法
下一篇:基于GAN技术的自能源混合建模与参数辨识方法