博文
云−边−端协同下考虑多车影响的混行车群集中式协同控制
|
引用本文
黄帅, 冯雨航, 郑太雄, 李永福. 云−边−端协同下考虑多车影响的混行车群集中式协同控制. 自动化学报, 2026, 52(1): 172−190 doi: 10.16383/j.aas.c240775
Huang Shuai, Feng Yu-Hang, Zheng Tai-Xiong, Li Yong-Fu. Centralized cooperative control of mixed vehicle groups considering multi-vehicle influence under cloud-edge-end collaboration. Acta Automatica Sinica, 2026, 52(1): 172−190 doi: 10.16383/j.aas.c240775
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c240775
关键词
混合交通,云−边−端协同架构,混行车群,集中式协同控制,网联自动车
摘要
随着车联网技术的进步, 由网联人驾车与网联自动车组成的混行车群规模正逐渐增大, 导致混行车群间的协同与交互难度增加, 进而影响混行车群行驶状态的一致性. 为解决此问题, 提出一种云−边−端协同下考虑多车影响的混行车群集中式协同控制方法. 首先, 为有效处理和分析较大规模混行车群产生的海量异构数据, 设计混合交通场景下云−边−端协同架构. 然后, 考虑网联人驾车前方两辆车及紧邻后车状态的影响, 以及网联自动车前方所有车辆及紧邻后车状态的影响, 分别在云控平台建立基于分子动力学的网联自动车和固定权重的网联人驾车协同行驶模型. 再者, 根据混行车群间动态影响关系, 设计基于云−边−端协同架构的混行车群集中式协同控制方法, 并利用稳定性和串稳定性理论获得混行车群协同行驶一致性条件. 最后, 通过对比仿真实验验证了所提方法的有效性.
文章导读
在智能交通系统快速发展的背景下, 车联网(vehicle-to-everything, V2X)技术与无线通信技术的集成推动智能驾驶技术领域取得一系列突破性进展[1−3]. 特别地, 与网联自动车(connected automated vehicles, CAVs)相关的协同自适应巡航控制(cooperative adaptive cruise control, CACC)在提升道路交通效率、减少能源消耗以及促进云计算和边缘计算等方面具备显著优势[4−8]. 尽管CACC对交通有较大的积极影响[9−11], 但仅局限于纯网联自动车场景, 即整个车辆群体都必须具备高度的连通性和自动化水平. 鉴于当前技术与经济条件的制约, 部分具备通信功能的车辆仍依赖人类驾驶员执行控制, 这类车辆被称为网联人驾车(connected human-driving vehicles, CHVs). 预计未来几十年内, 由网联自动车和网联人驾车共同构成的新型混合交通场景将持续存在[12−13]. 在此场景下, 网联自动车的引领与协同作用将促使网联人驾车融入, 共同演化为规模逐渐扩大的混行车群. 然而, 有限的通信资源导致混行车群间协同与交互难度增加[14−16], 在此情形下, 如何确保混行车群一致稳定地行驶已成为至关重要的研究方向.
近年来, 边缘计算技术和云计算技术的兴起推动了智能交通系统的快速发展[27−29]. 在这一背景下, 基于上述技术的车群协同控制已逐渐受到学者们的关注. 例如, Song等[30]针对“云−边−端”架构下网联自动车的跟随控制问题, 提出一种基于非奇异终端滑模变量的滑模控制方法, 通过理论分析和仿真实验, 验证了该方法能够提高车辆群体的动态性能, 确保车辆群体能在有限时间内收敛至稳定状态; An等[31]针对异构车辆编队在云跟踪控制下存在执行器故障和动态不确定性问题, 提出一种基于双重学习机制的自适应容错云跟踪控制方法; Zhao等[32]针对异构车队的协同控制问题, 提出一种基于云边协同的分布式模型预测控制和事件触发机制的方法. 然而, 上述研究主要在云−边−端协同下考虑具备自动驾驶功能的车辆群体, 对于包含网联人驾车的新型混合交通场景并不适用. 为此, Wang等[33]针对复合道路环境下非平衡混合交通流模型适应性不足的问题, 提出基于“端−边−云”架构的非平衡混合交通流跟驰模型, 结果表明所提模型可以确保混行车群行驶的一致性和稳定性. 但是, 这一研究未充分考虑混行车群中部分人驾车对网联自动车的影响, 不适用于较大规模的混行车群.
基于上述分析, 本文聚焦于由网联自动车和网联人驾车组成的新型混合交通场景, 研究较大规模混行车群的行驶一致性与稳定性问题. 本文的主要创新点如下:
1)现有文献[30−33]只在网联环境下采用云计算与边缘计算架构, 难以适应新型混合交通场景. 针对这一局限性, 本文设计一种适用于新型混合交通场景的云−边−端协同架构. 具体而言, 在边缘端处理并上传异质车辆信息数据至云端; 在云端构建异质车辆协同行驶模型, 并集中计算与下发异质车辆控制反馈信息至车端; 在车端网联自动车接收控制反馈信息执行直接控制, 网联人驾车由驾驶员参考控制反馈信息后执行间接控制.
2)本文中的网联自动车采用分子动力学建模方法, 通过引入前后车辆状态及最大加速度约束, 定量分析前方所有车辆及紧邻后车的动态影响程度; 对于网联人驾车, 利用固定权重法定量表达前方两辆车及紧邻后车的影响; 基于此, 借鉴云−边−端协同技术, 在云端的云控平台构建考虑多车信息影响的异质车辆协同行驶模型.
3)结合异质车辆协同行驶模型和混行车群内异质车辆间信息影响关系, 本文基于云−边−端协同架构提出一种确保混行车群快速收敛至一致稳定状态的集中式协同控制方法, 该方法能够提升较大规模混行车群的整体协同性, 并通过仿真实验验证了该方法的有效性.
本文的结构如下: 第1节为问题描述及云−边−端协同架构, 描述较大规模混行车群问题, 建立异质车辆运动学模型和云−边−端协同架构, 并对云−边−端协同架构的集中式协同机理进行阐述; 第2节设计基于云−边−端协同的混行车群集中式协同控制方法; 第3节结合异质时延特性, 对混行车群的稳定性及串稳定性进行理论分析; 第4节通过无时延下不同混行车群控制方法的对比仿真实验、有通信时延下考虑头车扰动的数值仿真实验以及不同CAVs渗透率下的数值仿真实验, 验证了所提方法的有效性; 第5节进行总结与展望.

图1 新型混合交通场景
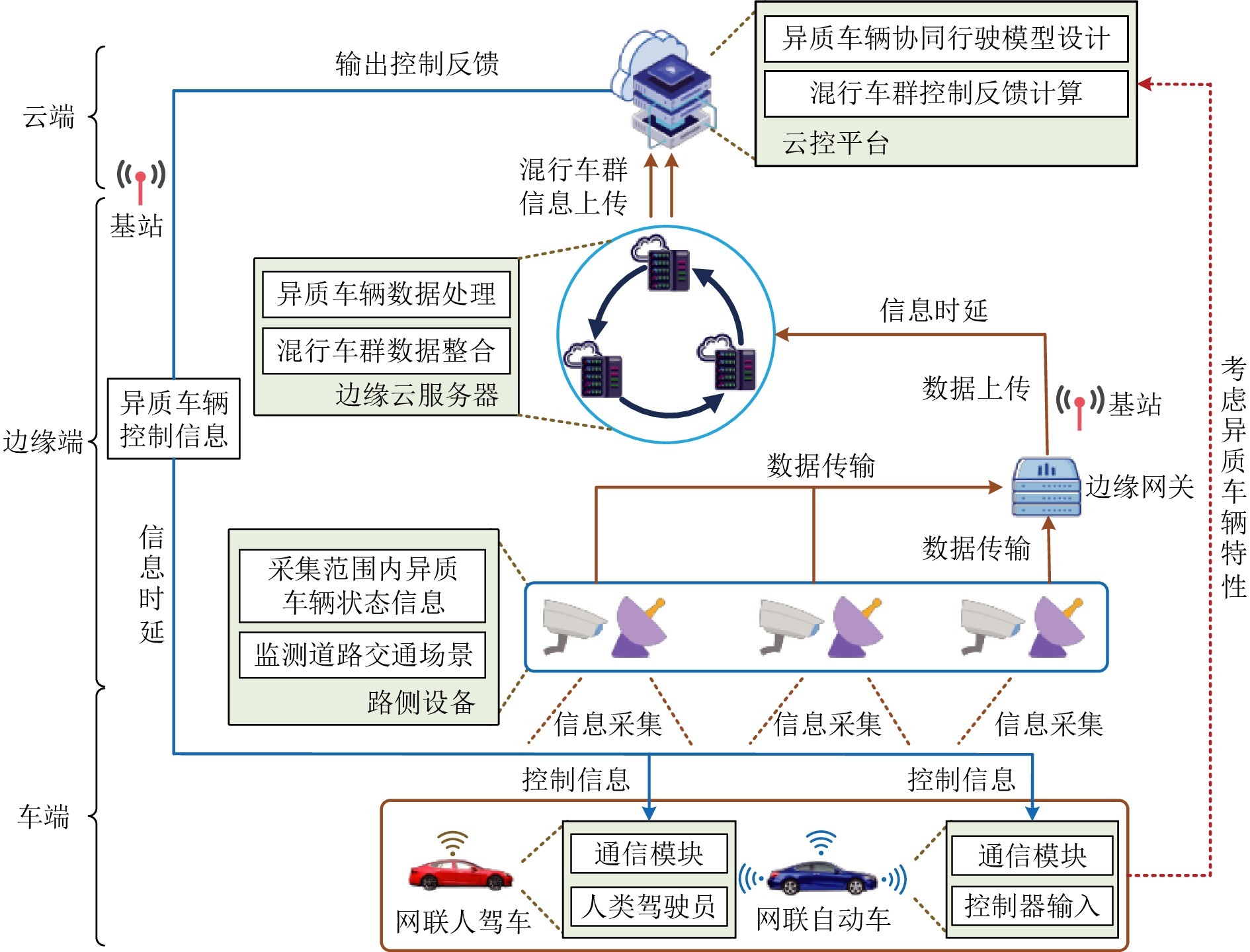
图2 云−边−端协同架构
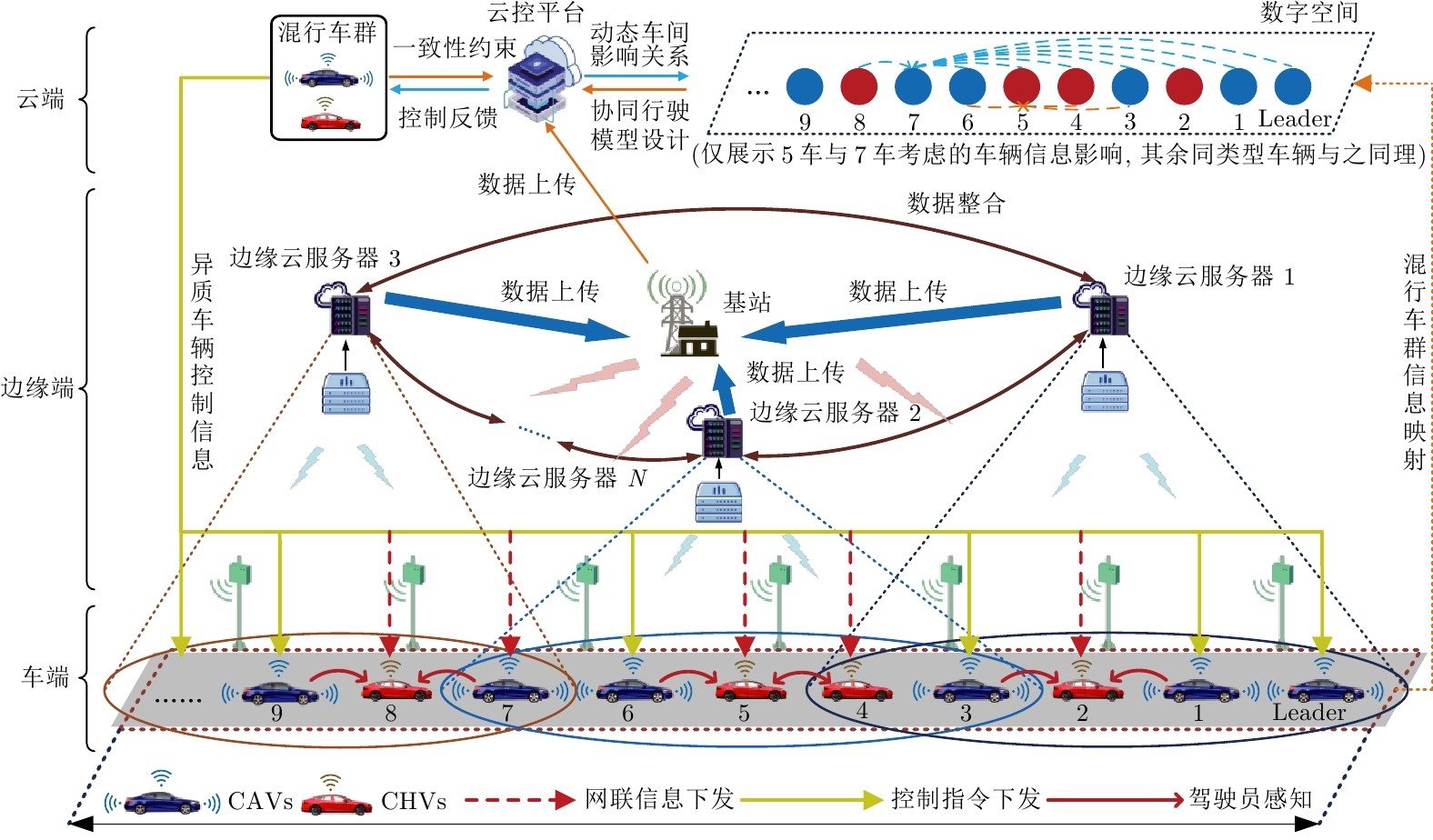
图3 云−边−端协同下考虑多车影响的混行车群集中式 协同控制机理
本文关注较大规模混行车群行驶的稳定性问题, 设计了新型混合交通场景下云−边−端协同架构. 然后考虑网联人驾车前方两辆车及紧邻后车状态信息的影响和网联自动车前方所有车辆及紧邻后车状态信息的影响, 分别在云控平台设计网联自动车和网联人驾车协同行驶模型, 进而根据混行车群间动态信息影响关系, 构建云−边−端协同下考虑多车影响的混行车群集中式协同控制方法, 并通过单车道混行车群仿真实验验证了所提控制方法的有效性和可行性. 然而, 本文仅验证了单车道场景下MFRVI-CDM在具有时延、头车扰动情况时的性能优势, 未深入分析所提模型在极端交通场景下的性能, 以及云−边−端协同架构面临的计算或通信瓶颈.
在未来工作中, 我们将会深入研究在极端交通场景(如高密度车流、复杂路况、突发交通事件)中所提方法的适用性, 以及云−边−端协同架构在实际应用中面临通信延迟与中断、云端与边缘端算力限制及数据传输瓶颈等问题. 同时, 也将结合实际交通数据和多车道仿真平台, 验证所提方法在复杂交通场景中的鲁棒性, 以提升新型混合交通的通行安全与效率.
作者简介
黄帅
重庆邮电大学人工智能学院讲师. 主要研究方向为智能车辆与智慧交通, 具身智能机器人, 群体智能协同感知、决策与控制. E-mail: huangs316@163.com
冯雨航
重庆邮电大学集成电路学院硕士研究生. 主要研究方向为智能驾驶与智慧交通. E-mail: fyh010110@163.com
郑太雄
重庆邮电大学集成电路学院教授. 主要研究方向为工业智能感知与控制. 本文通信作者. E-mail: zhengtx@cqupt.edu.cn
李永福
重庆邮电大学自动化学院教授. 主要研究方向为智能网联汽车和空地协同控制. E-mail: liyongfu@cqupt.edu.cn
https://wap.sciencenet.cn/blog-3291369-1522823.html
上一篇:露天矿机器人化采运理论技术框架