
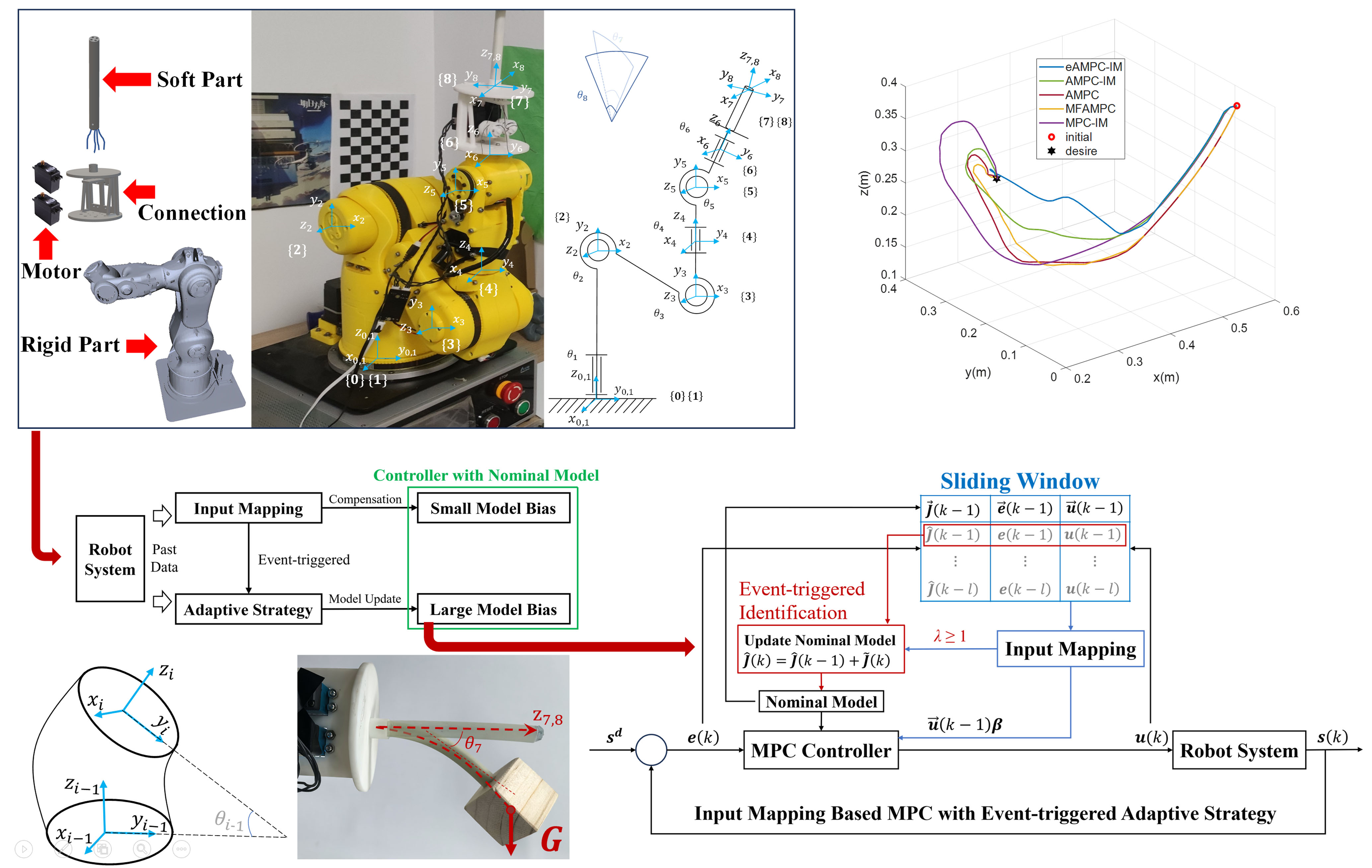
基于输入映射及事件触发自适应策略的刚柔混合机械臂模型预测控制
李国林1,陈通2,何邵颖3,尹德斌4
(1. 华中科技大学 机械科学与工程学院,武汉 430074;2. 上海交通大学 自动化与感知学院,上海 200240;3. 中国航空无线电电子研究所,上海 200241;4. 美的集团智能制造研究院,广东佛山 528311)
摘要:不确定性负载会直接影响刚柔混合机械臂的工作配置,改变系统模型参数,从而降低其控制精度和效率。介绍了一种带有事件触发自适应策略的模型预测控制,并结合数据驱动方法控制刚柔混合机器人,其中软体部分由电缆驱动。在模型不确定性和匹配失真的情况下,使用自适应辨识方法改进控制器内的名义模型;同时使用事件触发方法以降低冗余的辨识频率,以提高计算效率。此外,使用了一种在线数据驱动方法,即输入映射,利用历史输入和输出数据的关系,并通过线性组合补偿了控制器中的轻微模型误差。在无限时域中,设计了衰减系数以高效解决优化问题。对比仿真和实验结果表明:本文所提方法在精度和收敛速度上都实现了更好的效果。
关键词:刚柔混合机器人,输入映射,事件触发,自适应模型预测控制,递归可行性,稳定性
扫二维码浏览全文
Cite this article
Li, G., Chen, T., He, S. et al. Input Mapping-Based Model Predictive Control with Event-Triggered Adaptive Strategy for Rigid-Soft Hybrid Manipulator. J. Shanghai Jiaotong Univ. (Sci.) (2026). https://doi.org/10.1007/s12204-026-2902-4
转载本文请联系原作者获取授权,同时请注明本文来自黄龙旺科学网博客。
链接地址:https://wap.sciencenet.cn/blog-45888-1521216.html?mobile=1
收藏