
[转载]真空晶圆传输机器人碰撞检测
2026-1-30 10:13
阅读:774
真空晶圆传输机器人碰撞检测
方兴雨1,魏鲜明2,孙锦涛1,徐林森1
(1. 河海大学 机电工程学院,江苏常州 213200;2. 中国电子科技集团公司 第五十八研究所,江苏无锡 214035)
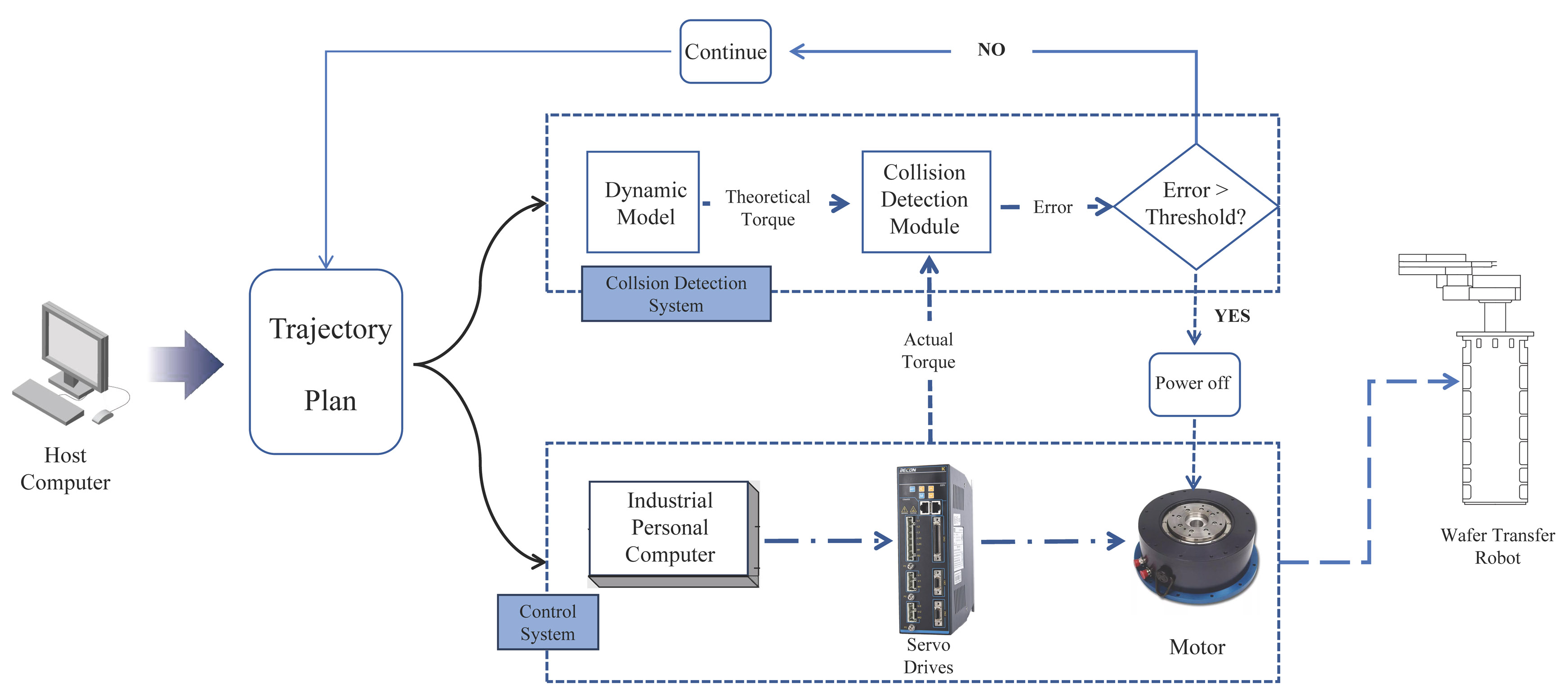
摘要:针对晶圆传输机器人在狭小的真空腔体内发生碰撞后会导致晶圆碎片和生产线污染的安全问题,提出了一种基于机器人动力学模型与加速度调节阈值的碰撞检测与响应方案。首先,对晶圆传输机器人的结构与运动特点进行了分析;在此基础上建立了机器人的运动学模型和动力学模型并在仿真软件上进行了仿真验证。为避免噪声的引入,使用在上位机规划的轨迹来计算机器人动力学模型;基于互相关分析出规划轨迹与编码器反馈得到的轨迹之间的相位差,并在算法中进行了相位补偿。在碰撞阈值的设定方面,视机器人发生碰撞的风险程度,基于机器人的加速度制定了阈值调节方案。最后,在真空晶圆传输机器人上开展了碰撞检测实验;实验结果证明了该方法的有效性。
关键词:真空晶圆传输机器人,碰撞检测,力估计
扫二维码浏览全文

Cite this article
Fang, X., Wei, X., Sun, J. et al. Collision Detection for Vacuum Wafer Transfer Robot. J. Shanghai Jiaotong Univ. (Sci.) (2026). https://doi.org/10.1007/s12204-026-2899-8
转载本文请联系原作者获取授权,同时请注明本文来自黄龙旺科学网博客。
链接地址:https://wap.sciencenet.cn/blog-45888-1520459.html?mobile=1
收藏
当前推荐数:0
推荐到博客首页
网友评论0 条评论