
[转载]面向无人机自主降落的多阶段视觉引导
2025-12-18 08:59
阅读:1149
面向无人机自主降落的多阶段视觉引导
王红雨1,董广玉1,党正1,程城2,陈飞2
(1. 上海交通大学 自动化与感知学院,上海200240;2. 北京市公安局反恐怖和特警总队,北京100740)
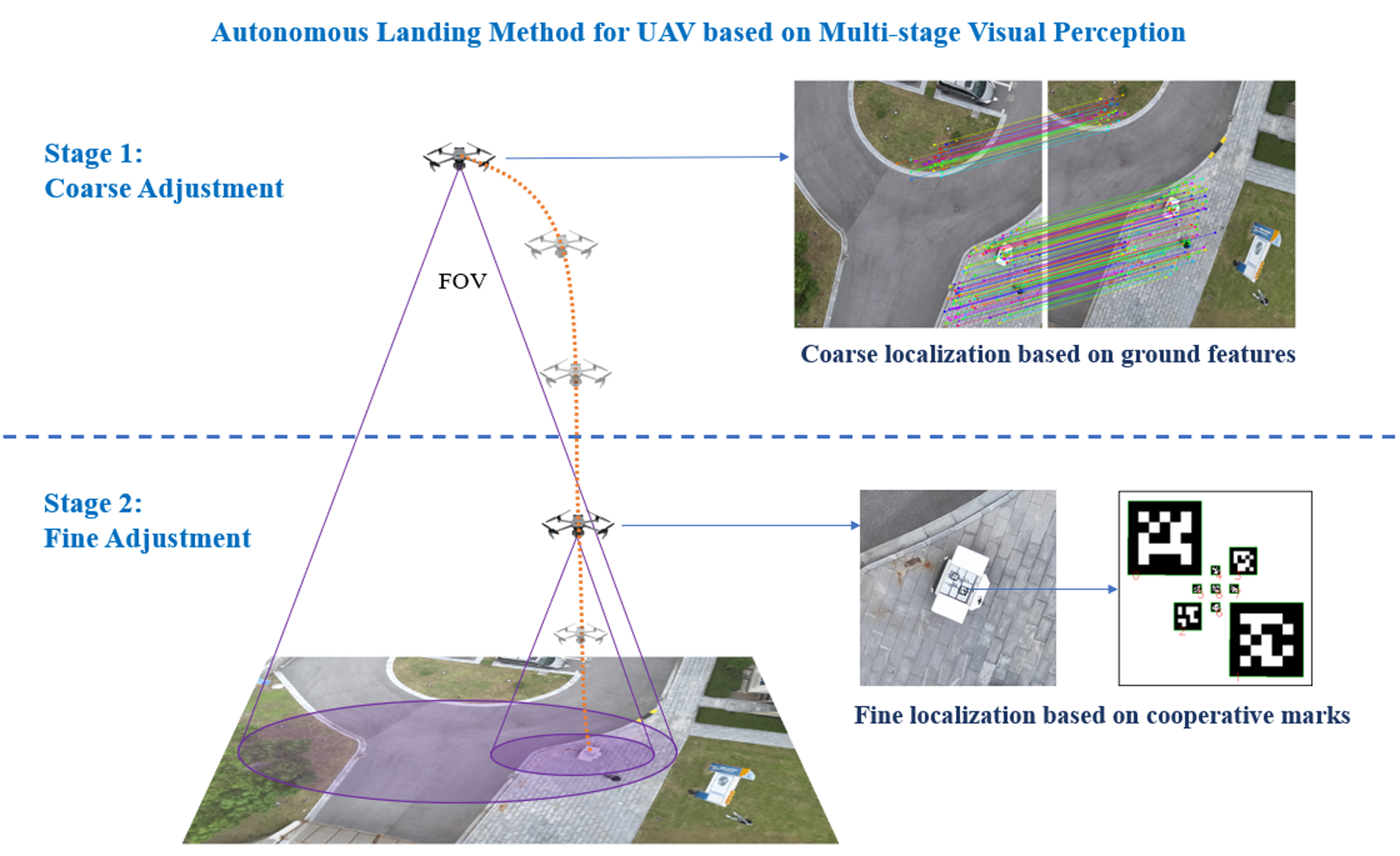
摘要:为了解决四旋翼无人机自主降落过程中由于相机可视角度和可视距离限制导致的视觉感知问题,本文提出了一种基于多阶段视觉定位的无人机自主降落方法。该方法通过地面特征提取与匹配实现无人机的粗略定位,随后结合合作标识进行精确定位,从而实现无人机的精准降落。在粗定位阶段,采用DISK和LightGlue算法提取并匹配地面特征点,并利用已知的相机到地面的距离对无人机位置进行初步估计。在精定位阶段,采用AprilTag算法检测降落平台上的合作标记,以进一步提高降落精度。实验结果表明:该方法在复杂环境中具有较强的鲁棒性和较高的定位精度,能够有效实现基于视觉的无人机精准降落。
关键词:四旋翼无人机,自主降落,视觉定位,特征匹配
扫二维码浏览全文

Cite this article
Wang, H., Dong, G., Dang, Z. et al. Multi-Stage Visual Guidance for UAV Autonomous Landing. J. Shanghai Jiaotong Univ. (Sci.) (2025). https://doi.org/10.1007/s12204-025-2882-9
转载本文请联系原作者获取授权,同时请注明本文来自黄龙旺科学网博客。
链接地址:https://wap.sciencenet.cn/blog-45888-1514801.html?mobile=1
收藏
当前推荐数:0
推荐到博客首页
网友评论0 条评论