博文
[转载]基于时变期望间距的ACC/CACC车辆跟驰模型及混合交通流稳定性分析
||
基于时变期望间距的ACC/CACC车辆跟驰模型及混合交通流稳定性分析
赵红星1,刘书英1,梁瑞艳2,何瑞春1
(1. 兰州交通大学 交通运输学院,兰州730070;2. 国网甘肃省电力公司数字化事业部,兰州730000)
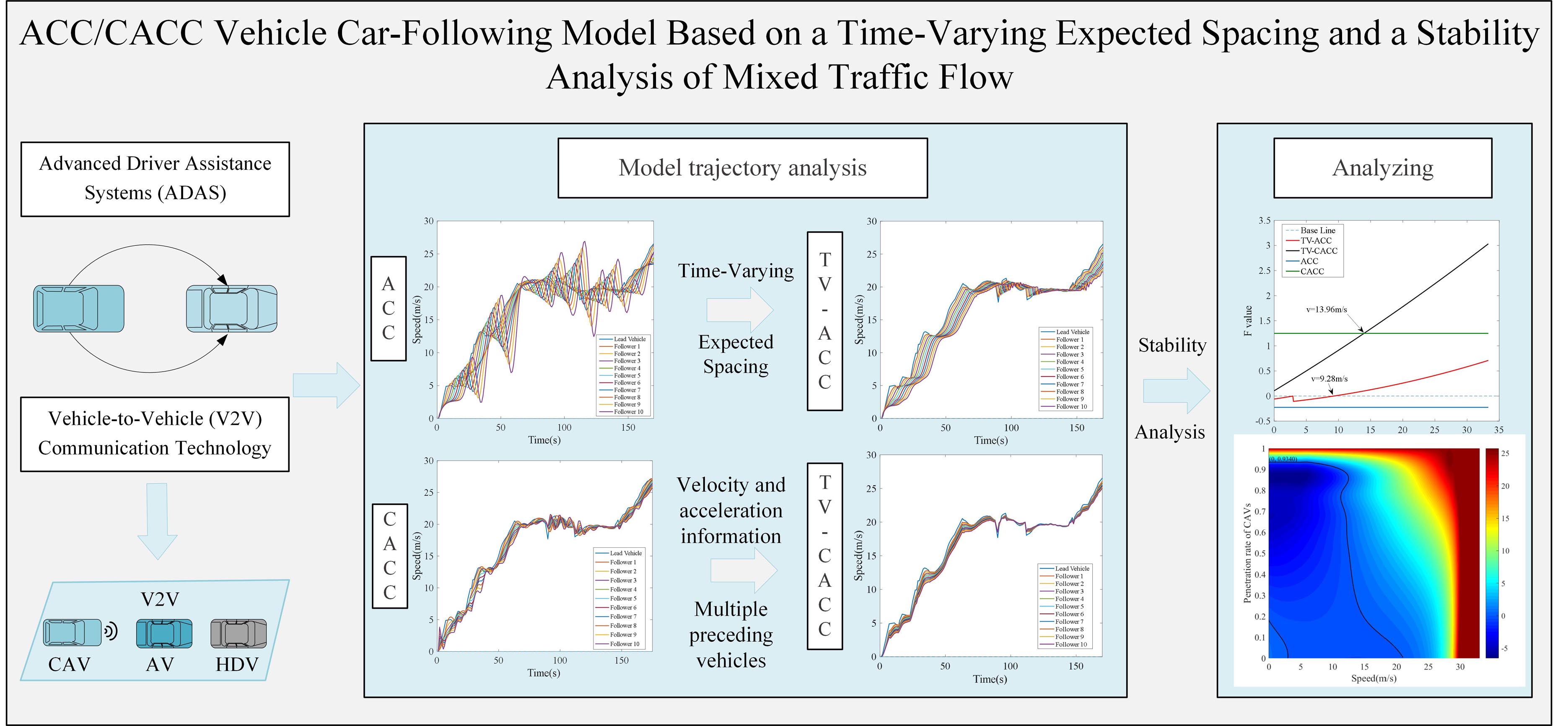
摘要:智能网联车辆(CAVs)是未来智能交通系统的重要组织形式,将和人类驾驶车辆(HDVs)混合行驶在同一条道路上。为了更准确地描述CAVs的跟驰特性,用实测数据作为头车的行驶轨迹数据,采用PATH实验室提出的自适应巡航控制(ACC)与协同自适应巡航控制(CACC)模型进行跟驰轨迹模拟。车辆轨迹仿真时,发现该模型存在撞车、倒车行为以及速度波动幅度较大的情况。针对ACC模型的不足,引入时变期望间距,提出TV-ACC模型。考虑到CACC与ACC的差异,引入时变期望间距及多前车的速度与加速度信息,提出TV-CACC模型。数值仿真和理论推导结果表明:相较于原模型,改进后的模型能够克服原模型存在的撞车、倒车和速度波动幅度较大等不足,从而表现出更好的性能;改进模型能有效地改善交通流的稳定性及驾乘舒适性,并且随着CAVs渗透率的增加,混合交通流稳定性及驾乘舒适性逐渐提升。混合交通流的稳定性随着CAV的最大车队规模增加逐渐变差。
关键词:跟驰模型,自适应巡航控制,协同自适应巡航控制,混合交通流,交通流稳定性
点击分享码全文pdf浏览:https://rdcu.be/ecxPq
Cite this article:Zhao, H., Liu, S., Liang, R. et al. ACC/CACC Vehicle Car-Following Model Based on a Time-Varying Expected Spacing and a Stability Analysis of Mixed Traffic Flow. J. Shanghai Jiaotong Univ. (Sci.) (2025). https://doi.org/10.1007/s12204-025-2805-9
https://wap.sciencenet.cn/blog-45888-1485090.html
上一篇:[转载]使用图神经网络提高说话人验证后端性能
下一篇:[转载]使用图卷积网络和剪枝的DenseNet121进行乳腺癌分类