
无人水面艇设计及舾装系统分析– 载运工具设计研究(个人原创作品选载)支援装备模块化设计系列
水面无人艇壳体多线程壳体放样技术及壳体表面流场阻力和稳心研究
Vol.3 (11) 两栖支援保障装备模块设计研究-水陆协同支援初步(节选)
(设计车型编组ASV-CS,ASV-VMD,ASV-SNR-II,ASV-PTO,T-965-H;设计艇型编组USV-G-HFW)
(设计数字虚拟场地编组 RIVERSIDE-5#)
王博文©
两栖支援模块的“水陆协同”支援系列,包括车载无人艇和水面艇收放装备设计,以及设备的数字测试和虚拟场地测试。为测试两栖车队的登陆能力,也同时设计了反两栖登陆岸线和开展了反两栖登陆岸线相关水下无害化障碍物研究。
通过两栖车队在虚拟场地测试的两栖登陆和入水作业过程中的反复试验和设计优化,轮式两栖车在两栖登陆过程中,如遭遇陡坡湿滑水藻,或反登陆岸线障碍设计堤岸等情形,两栖车前轮难以形成有效摩擦,且车尾螺旋桨水力推进能力不足以支撑整车出水登陆所需动力时,则无法使用两栖车辆进行入水支援。
所以,轮式两栖车在面对大多数自然水体情况下(而不是少数情形),应采取“水陆协同”支援模式完成两栖任务。否则不仅会出现两栖车“入水容易、出水难”的困境,甚至有可能造成装备损失事故。因此,车载无人艇在一般性水域支援任务中,具有不可替代作用。无人艇在各种自然水体包括海面,河流湖面,狭窄水路等复杂地带都具有适用性。
下图,从左向右依次是USV-CA搜救无人艇,ASV-PTO-K动力输出车,T-965-F平板式挂车,ASV-SNR-II车载无人艇导航雷达车,T-965-H自动挂车,ASV-CS-RT协同支援指挥车。

图1:水陆协同两栖支援车载无人艇夜间联合搜寻作业场景(局部)
车载无人艇设计(下图),艇长4120mm,总重量350KG,铝合金壳体厚度6mm,闭环结构肋架间距300/600mm,整体水密。自动双尾舵提高横倾情况下舵效,采用单螺旋桨推进器,电力驱动(可根据航速设计需要调整装机容量)。艇高1.63米,满载水线下壳体体积1.19立方米,满载水线0.65米,无人艇具有自动回正载荷配置,壳体设计有义波高1. 5米,具有船级社相关设计规范三级海况环境适航性。
二级海况设计理论巡航速度18节(ES),三级海况可以满足13节巡航速度。符合经济航速和持续大多数近海或内河搜寻作业的需要。

USV-LB轻型车载无人水面艇壳体表面流体测试箱效果(局部)
通过水洞和姿态稳定测试技术可以初步测得USV-LB轻型车载无人水面艇设计有义波高符合三级海况,三级海况有义波高纵向涌浪阻力增加情况下会导致航速/航程快速衰减,推算航程200KM-390KM(航线受纵波和横波仿真影响变动差异),壳内可集成额外安全负载200-260KG,巡航半径约160KM,使用电动推进系统,散热系统整体水密使用接触传导散热。
无人艇设计过程中,采用闭环复合龙骨闭合弹性先进结构设计反向支撑受力分布,精确配置设备载荷与低重心技术,壳体自由曲面设计,经过数字化水箱测试有效优化阻力性能。壳体使用FLOATLINE自有专有技术一次性多线程方式以曲面形式优化壳体,此技术在船艇壳体设计领域处于船艇壳体设计的先进水平,同步达到流体动力仿真优化后的效果(CAD-CAE过程化设计及数字化放样工艺)。
无人艇采用一体化舾装技术,整体水密,模型在120度横倾角情况下经过6-DOF数字化水洞姿态测试仍支持姿态自动回稳,设定7.5m/s-15m/s波速和1.5m有义波高虚拟流场影响条件时,采用虚拟样机多体动力学测试具有抗倾稳性。
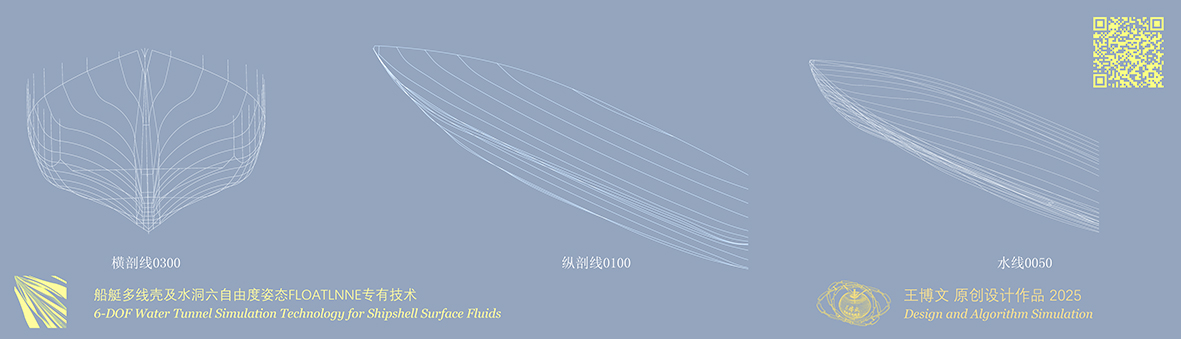
水面无人艇壳体表面流体FLOATLINNE专有技术一次多线出壳(局部删减)
USV-LB车载水面无人艇在设计之初经数字流场水箱测试, COB/COG/COF三点动态优化测试,在不发生与外界剧烈碰撞破损的情况下,不具有进水可能。经过数字流场对壳体进行仿真测试表明:二级以下海况情况下,以15节航速巡航时,壳体水线面具有良好流线分水曲面和艇底面压水平稳性。无人艇具有多目标扫描功能,能有效协同多艇作业,以范围路径区域自动巡航,提高水面搜寻效率。
车载无人艇模块外形尺寸是为轻型两栖车队定制,使用T965-H挂车载运,由标准型ASV-L两栖载运车牵引挂载运输。T965-H挂车具有自动门和自动滑台和自动收放设备设计,自动滑台具有配套附件可以在缓坡地形入水地带搭建小型栈台泊位,接驳/投放无人艇,亦可搭配滑道缆索牵引无人艇上岸。对于反两栖登陆地形可以采用组装式模块立体缆索起重机进行吊装。
无人艇通信设备:
卫星通信
移动网络通信终端
使用蜂窝路由器(在两栖导航车基站支持下使用网络通信),导航采用船载GNSS卫星定位系统和自主雷达导航。
无人艇电子设备
多目标定位导航雷达,模块化桅杆配备LED射灯、水面泛光灯和广播系统,具有无线电信号中继发射单元,测距仪,电子陀螺仪,AIS识别系统,速度传感器,水深探测仪ES,计程仪LOG,滤波雷达等。
导航车电子设备
电子海图系统ECDIS,内河版导航系统,气压计,风速计,罗经,MF/HF无线电,VHF无线电,多目标跟踪雷达,卫星定位系统等。
无人艇照明系统
夜晚海面漆黑恐怖,无人水面艇照明系统有小灯塔作用。但是它们必须根据海况保持编队进行作业,以便使它们始终有暴露在波峰以外的灯光,来尽可能提供静水线以上连续闪烁光源来吸引搜救目标。
无人艇编队需要互相避开直射光,无人艇照明系统进行目标区域环境照明摄像和回传视频流;
无人艇广播系统
无人艇广播系统需要通过音频提醒有生命目标,需要有科学设计的声速规律间隔广播音频,也需要现场收集有生目标应答回传音频。艇编队根据航速和海况自动保持科学间距,避免由于声学传播距离速度影响下的声效干扰;
关于两栖支援装备设计序列已经发布的信息可浏览页面链接:
车载J-TFW折叠翼无人机设计/无人机发射车设计(地空协同)
RIVERSIDE-5# 虚拟试验场设计介绍:
①RIVERSIDE-5#地形,是沿河纵向扩展地形,总长有数公里,此次测试使用的网格区域地形特点是濒水地段坡度比较平缓,适用于布置水陆支援车队开展各类无人艇投放和回收作业。该地形有水体流场数字化版本,三维实体版本转化支持3D打印。
②地形适用于开展小规模车队,线形作业布置。尤其适合水面无人艇协同作业,搭建临时小型水面艇泊位和模块化接驳设施。尤其是两栖车队接驳中型登陆艇,搭载艇载两栖车队行进转运的海基投送模式(后续相关设计作品中会发布)。
③此地形岸线局部设计有多种反两栖登陆构筑物和布置,用于测试轻型两栖登陆装备的协同作业性能。
附:轻型两栖支援保障装备相关设计信息技术体系简介(UPD.250327)
本系列轻型两栖支援保障装备设计过程中应用的技术伴随研发过程会形成新的优化,内容会有持续删改和增补,应以最新日期简介内容为准。
1、轻型支援保障型号系列模块体系
§ 支援装备理论研究及仿真试验:含本人自有科研项目及本人原创设计的 地面车辆、飞行器、水面艇、潜航器、高空长航程飞艇、太阳帆、行星表面载运工具研究等;
§ 基于同步三维视效和试验数字地形设计条件(地形地貌水文)的,支援装备整体效能规划研究;
§ 装备多样化立体协同支援效能研究;
§ 装备协同支援能力模块设计,空地协同、水陆协同、水下协同、特殊场地与特种装备保障协同;
§ 轻型两栖支援模块的立体载运运输设计;
§ 两栖支援技术总结及数据库设计;
2、机械系统设计及数字三维场地物理算法
§ 设计路径的参数化高程和力学反馈数据库;
§ 基于ADAMS数字化虚拟样机验证;
§ 基于CREO的参数化设计;
§ 基于CATIA相关模块的动力学联合仿真;
§ 基于ANSYS的网格化结构设计和流场分析;
§ 基于MATLAB和C的数字地形和路径设计;
§ 基于等比例工程视效CAD地形二次开发工具;
3、专有技术介绍(可通过下列链接浏览)
§ 三维虚拟场地光影等比例视效ILLUMISITE专有技术;
§ 物体空间运动姿态与接触表面6DOF-BODYATTI专有技术;
§ 船艇多线壳及水洞六自由度姿态FLOATLINNE专有技术;
§ 飞行器翼面空气动力及空间姿态算法SAILLEAF专有技术;
§ 多缆索立体载运及六自由度迅捷姿态伴随6DOF/FTPM专有技术;
4、设计技术集成
§ 由CAD-CAE的过程设计;
§ 系统化和参数化工程设计;
§ 立体六自由度位形姿态下的数字化设计;
5、轻型支援保障虚拟场地及构筑物设计
§ G49车身姿态测试地形;
§ G300MT低空航空测试试验场(含数字化地形及风场);
§ ATOLL-EX海基立体支援试验场(含数字化场);
§ RIVERSIDE-5# 反两栖登陆试验场;
§ ILND1200反两栖登陆试验场;
§ SINKHOLE试验场;
§ MFE山体试验场(陡峭地形类);
§ UWT水下试验场(水下协同支援保障环境);
§ 因某些特殊支援任务而临时开发的有规划构筑物试验场地;
§ 小行星局部场地保障装备测试场地和引力场设计;
关于版权保护和其他
作品图像及内含源文件及专有技术独立著作权所有。
根据上行传输刷新速率和版权保护的技术需要,图片分辨率发布前经过像素技术处理,色彩深度和清晰度仅支持普通显示屏(13寸以下)浏览最低需要,不支持商业幅面高清输出还请理解。
发布内容未公开图纸、计算方法和仿真过程,全部内容均未含任何保密技术,未含任何商业用途,仅供学术交流和阐述相关个人观点。
关于设计内容的更新
作品是长期持续设计研究,可链接本人公众号 年度科研动态 查询关于此作品的往期回顾和设计研究最新进展。
转载本文请联系原作者获取授权,同时请注明本文来自王博文科学网博客。
链接地址:https://wap.sciencenet.cn/blog-3530355-1480001.html?mobile=1
收藏