
两栖支援保障装备模块化车队设计研究-车队主要模块简介及模块紧凑编组数字地形测试
Vol.1 (S3) 地面车辆-轻型两栖支援(节略)
王博文©
两栖支援任务以快速反应及有效支援为设计原则。
此系列轻型两栖支援保障装备是本人关于载运工具设计研究的持续数字化试验项目,系列型号将由29个独立模块,6种车型和根据任务场景增加的可视化三维场地构成,可适用于非标准路面及自然地形保障场景。整个装备系列将涵盖:
①地面车辆,②地空协同,③水陆协同,④水下协同,⑤场地立体载运,⑥场地工程,⑦高空协同,共计七个系列主题。
先期主要是系列装备的重要理论建立,专项研究与关键文献积累和分组编辑。完成装备的基础概念设计、重要结构预设计和仿真验证、重要系统尺寸设计、地面载具通用底盘设计、机械系统选型设计,翼面气动设计和风洞关键技术,船艇壳体多线程放样关键技术,船艇壳体流场与动态稳定性分析技术,船艇壳体结构的参数化设计开发,潜航器壳体及舵面流体分析及水洞姿态关键技术,起重机稳定性设计,缆索系统张力平衡和卷扬机构控制器代码设计。
后续将根据工作需要开展主要模块的专业设计仿真和后续深度研究。
完整设计完成后会建立比较系统的用于基于大型任务场景化的两栖支援保障研究和二次开发,是比较系统完整的原创作品。在整个设计过程中将按照时间线分享部分设计,并为此轻型支援装备序列建立比较完整的成长历程。
下面简要介绍此序列的构成:
§ 地面车辆:两栖支援,全地形挂车,雷达车,导航车,餐车,露营车,指挥车,搜救车和救护车等。
§ 地空:车载先进无人机。
§ 水面:车载无人水面艇。
§ 水下:车载水下潜航器。
§ 场地立体载运:由多种成套系列的立体缆索驱动并联机器人构型和支链系统构成,适用于多种地形特殊场地开展特种保障载运任务。
§ 场地工程:清障车,模块起重机,水面载具收放车,供电车,
*上述各种类型的装备设计都可以在后续发布的各种作业场景中看到。
地面车辆的设计介绍:
轻型两栖支援保障装备的地面车辆,是快速抵达保障的基础。具有普通救援装备不具备的一些独特特性:
§ 自然地形及水体湿地周边复杂地形可达性(须符合登陆条件);
§ 两栖性能(具有螺旋桨水力推进器)具有自然水体通过性。
§ 标准消防通道及桥涵孔洞限高条件下,持续双向往复全天候支援;
§ 模块体积适用于航空运输条件,可空运投送,快速部署。尤其适用快速登陆艇和重型直升机投送。
§ 依据任务需要随时配置模块,有针对性开展场景化支援行动。
§ 空地立体化精确搜寻,准确定位,迅捷抵达,有效支援,持续保障,安全撤离。
下面选两个早先已经发布过的模块进行简单说明:
两栖支援指挥车(ASV-CS-RT型/ASV-CS-VV型/ASV-CS-BS型)是保障车队模块中的重要组成。在获取支援信息后,指挥车将率先协同先遣小队若干基础模块支援车辆抵达任务范围区。指挥车配备多功能密封车身和车载装备,使得它成为任务保障模块化车队的任务决策中心,早期抵达任务区域,开展态势感知和现场支援时机综合分析,并最终决定是否满足支援条件或实施保障方案。指挥车模块是实现初步计划的基础装备。
ASV车型指挥车分为三种模块:
①乘员型(解决与人有关的相关支援保障任务,搭载与任务相关的成员,车载机器人或相关任务技术人员,配备符合人类视听需要的现场指挥设施);设计车型编组ASV-CS-VV/设计数字地形G49-C3
②协同型(执行无人区或特殊区域有关的支援任务或特种任务,配备特种发射装备,不需要接触人群);
③支援型(执行专业信息和特殊样品采集相关的支援任务);设计车型编组ASV-CS-RT/设计数字地形G49-C3

两栖支援车-指挥车
(设计车型编组ASV-CS,设计数字地形分区G49-A2/ G49-C3)

两栖支援车-动力输出车
(设计车型编组ASV-PTO-K,数字地形分区G49-E5)
动力输出车是两栖支援保障车队重要组成部分,它承担先期抵达场地,为现场其他装备提供动力输出和照明供电任务。
指挥车通常需要伴随联系紧密的其他四个基础模块车组成先遣小队。
①动力输出车(车载发电机、储能设备、照明及车载通讯装备);
②雷达车(根据场地类型和车队指挥辅助需要,通常需要四种类型进行支援保障,分别用于飞行器定位,多目标协同,水面多目标定位与导航,导航及气象水文);
③无人机发射车包括:车载固定翼机型弹射发射车,折叠翼无人机发射车;
④轻型载运车(车队保障)保障车模块 栏式货箱/平板框架式/封闭厢式/清障抛撒工程等模块。
指挥车队抵达支援区域开展决策前,需要完成先期搜寻任务和开展场地区域地形水文气象等条件调研,在判断风险和价值综合分析后,确有可能实施后续支援保障的条件下,才可以进行任务区精确搜寻和目标定位任务,第一时间准确投放关键信标和组织后续保障。
两栖支援车队小编组队形的紧凑型行进测试,如下图编组的五个模块依次分别是:
指挥车、无人机载运发射车,动力输出车,地空协同雷达车,轻型载运车和T-965-L挂车车型的一个高通过型移动载运模块。
在Valley23# 虚拟试验场,开展多项编组行进数字化性能测试:
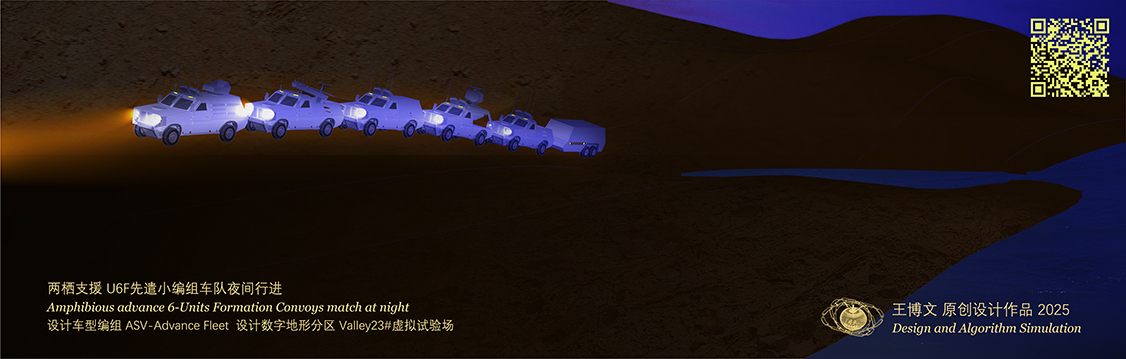
支援模块小编组U6F测试列夜行效果
(设计车型编组ASV-Advance Fleet,设计数字地形分区Valley23# 虚拟试验场)
编队测试解决的问题:
①车队分散队形起伏场地在分散行进和收拢队列状态时的编队首尾组合问题。
②车队队形在通过连续起伏地面时的速度极限模拟计算。
③车队紧凑队形在连续起伏场地夜间行进,车队编组对抗机器视觉识别和自动计数。
④紧凑型车队在连续起伏地面利用地形掩护形态,编队通过主要视场时限,视效半径的可观测性比率,被光学设备观测的持续间隔参数。
⑤紧凑车队队形在间歇性场地保障作业过程中的组合形态以及衔接设备的通过性效率。
⑥极低能见度条件下的车队安全行进,地形被水体淹没后的安全撤离方案,特殊气候条件下的车队形态影响等。
紧凑队列行的车距极限和车队行进过程中伴随地形起伏的参数化关系。和平整道路行驶不同,连续大坡度起伏表面对于支援车队行进具有挑战,车队行进车距受限,车队整体运行效率需要配合功能化模块装备作业,涉及到清障、抛撒掩埋、观测采集、发射、渗透等作业。
由于道路纵坡横坡和自然水体的影响,车队在分散队形时影响小,但特种支援实际作业场地大部分情况紧凑行进和抵近支援,由于特殊气候条件和作业场地空间限制,车队模块始终要保持进退有序,作业线布置很多时候需要动态行进中开展。支援车辆车队队形在虚拟场地模拟试验具有不可替代现实作用。为下一步开展无人驾驶支援车辆集群作业,收集参数具有特殊作用,可以提高车队编队协同方案的安全性和效能。
当两栖支援车队涉水泅渡过程中,浪涌和暗流对车队涉水形态影响较大。当水面波浪起伏较大时,会造成车队队形无序扰动脱队失联,或发生水下植物缠绕,或互碰撞倾覆等严重事故。两栖支援车辆不是在风平浪静的海滨浮起来就可以,而是有一定气候影响条件下的编队物理状态的安全可靠和保障有序。
Valley23# 虚拟试验场:
①场地地形均为自由曲面形式的连续起伏地形,实体转化支持3D打印。
②有濒水连续起伏地形和具有波浪模拟的水体,浪高0.5-1.5米,符合大部分适合作业的海况。场地纵向坡度角介于10-30度之间,起坡与降坡切线小半径平均介于3-6米之间,符合小型越野车辆轴距安全要求,符合车轮三落点共面情况下的安全低速测试表面需要。
③场地适合接近角35度以上特殊车辆行进,横向坡度角介于5-30度之间,比较符合特种越野车辆单车和编队作业队形测试。
关于ASV两栖支援模块紧密相关的本人原创设计,已经发布的过往设计简报可浏览链接如下:
车载J-TFW折叠翼无人机设计/无人机发射车设计(地空协同)
附:轻型两栖支援保障装备相关设计信息技术体系简介(UPD.250327)
本系列轻型两栖支援保障装备设计过程中应用的技术伴随研发过程会形成新的优化,内容会有持续删改和增补,应以最新日期简介内容为准。
1、轻型支援保障型号系列模块体系
§ 支援装备理论研究及仿真试验:含本人自有科研项目及本人原创设计的 地面车辆、飞行器、水面艇、潜航器、高空长航程飞艇、太阳帆、行星表面载运工具研究等;
§ 基于同步三维视效和试验数字地形设计条件(地形地貌水文)的,支援装备整体效能规划研究;
§ 装备多样化立体协同支援效能研究;
§ 装备协同支援能力模块设计,空地协同、水陆协同、水下协同、特殊场地与特种装备保障协同;
§ 轻型两栖支援模块的立体载运运输设计;
§ 两栖支援技术总结及数据库设计;
2、机械系统设计及数字三维场地物理算法
§ 设计路径的参数化高程和力学反馈数据库;
§ 基于ADAMS数字化虚拟样机验证;
§ 基于CREO的参数化设计;
§ 基于CATIA相关模块的动力学联合仿真;
§ 基于ANSYS的网格化结构设计和流场分析;
§ 基于MATLAB和C的数字地形和路径设计;
§ 基于等比例工程视效CAD地形二次开发工具;
3、专有技术介绍(可通过下列链接浏览)
§ 三维虚拟场地光影等比例视效ILLUMISITE专有技术;
§ 物体空间运动姿态与接触表面6DOF-BODYATTI专有技术;
§ 船艇多线壳及水洞六自由度姿态FLOATLINNE专有技术;
§ 飞行器翼面空气动力及空间姿态算法SAILLEAF专有技术;
§ 多缆索立体载运及六自由度迅捷姿态伴随6DOF/FTPM专有技术;
4、设计技术集成
§ 由CAD-CAE的过程设计;
§ 系统化和参数化工程设计;
§ 立体六自由度位形姿态下的数字化设计;
5、轻型支援保障虚拟场地及构筑物设计
§ G49车身姿态测试地形;
§ G300MT低空航空测试试验场(含数字化地形及风场);
§ ATOLL-EX海基立体支援试验场(含数字化场);
§ RIVERSIDE-5# 反两栖登陆试验场;
§ ILND1200反两栖登陆试验场;
§ SINKHOLE试验场;
§ MFE山体试验场(陡峭地形类);
§ UWT水下试验场(水下协同支援保障环境);
§ 因某些特殊支援任务而临时开发的有规划构筑物试验场地;
§ 小行星局部场地保障装备测试场地和引力场设计;
关于版权保护和其他
作品图像及内含源文件及专有技术独立著作权所有。
根据上行传输刷新速率和版权保护的技术需要,图片分辨率发布前经过像素技术处理,色彩深度和清晰度仅支持普通显示屏(13寸以下)浏览最低需要,不支持商业幅面高清输出还请理解。
发布内容未公开图纸、计算方法和仿真过程,全部内容均未含任何保密技术,未含任何商业用途,仅供学术交流和阐述相关个人观点。
关于设计内容的更新
作品是长期持续设计研究,可链接本人公众号年度科研动态 查询关于此作品的往期回顾和设计研究最新进展。
著作权所有,保留全部权利。
转载本文请联系原作者获取授权,同时请注明本文来自王博文科学网博客。
链接地址:https://wap.sciencenet.cn/blog-3530355-1479617.html?mobile=1
收藏