
昆虫虽拥有微小的神经系统,却能在复杂环境中展现出高度适应性行为。这一现象引发了科学界的广泛兴趣:昆虫如何通过有限的计算资源实现高效的感觉运动整合?如何利用工程工具揭示其行为机制?
Applied Sciences 期刊发表了一项名为“感官-运动干预系统在理解昆虫适应行为中的应用”的综述研究,系统总结了利用工程工具干预昆虫感觉运动系统的最新进展,为仿生机器人及人工智能设计提供了新思路。
从生物到工程:昆虫适应性行为的解密之旅
昆虫的适应性行为源于其与环境的高效互动。传统生物学实验难以在开放环境中精确控制变量,而工程工具的引入为这一难题提供了创新解决方案。文章提到了一种结合生物学与工程学的实验框架,通过以下两种系统揭示昆虫行为机制:
1、昆虫机载系统 (Insect On-Board System):昆虫作为“驾驶员”控制机器人,通过操纵感觉输入与运动输出,分析其行为适应性 (图1)。
2、昆虫虚拟现实系统 (VR for Insects):在虚拟环境中提供多模态感觉刺激 (如气味、气流、视觉),定量研究昆虫的行为决策过程 (图2)。
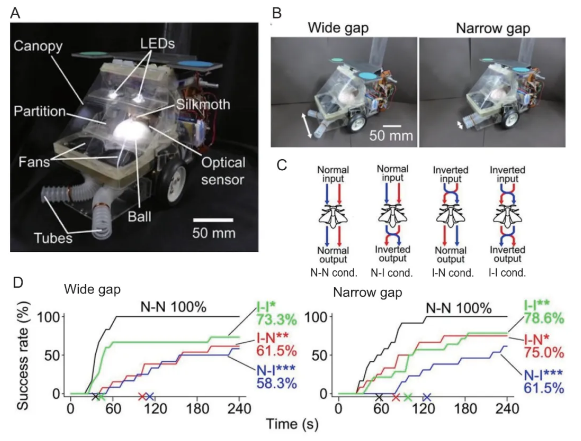
图1. 使⽤昆⾍机载系统对成年雄性蚕蛾⽓味源进⾏定位的实验
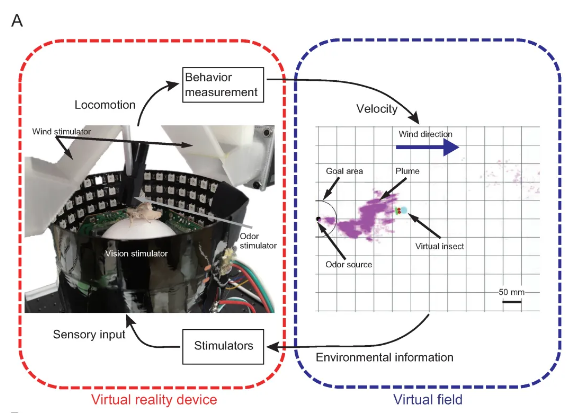
图2. 使⽤虚拟现实系统对昆⾍进⾏⾏为实验
技术亮点:感觉运动干预的创新应用
1、动态环境模拟:通过虚拟现实系统精确控制气味分布与气流方向,模拟自然环境中复杂的感觉刺激。
2、感觉-运动解耦实验:反转气味或运动方向输入,验证昆虫对双侧感觉信息的依赖 (如蚕蛾的性信息素追踪行为)。
3、多模态信息整合:研究发现,蚕蛾通过结合气味与气流信息优化导航效率,而视觉刺激在特定条件下进一步辅助行为调制。
蚕蛾导航行为的深度解析
以蚕蛾的性信息素追踪为例,研究团队发现:
1、局部气味梯度是决定运动方向的关键因素。
2、气流信息帮助昆虫调整运动速度,在感知错误方向时主动降低活动强度。
3、间歇性气味信号 (约0.7 Hz) 触发最积极的趋近行为,与雌蛾信息素释放频率 (0.8 Hz) 高度吻合。
未来方向:从行为到神经机制
尽管当前研究已实现行为层面的解析,但昆虫神经系统的具体处理机制仍需探索。未来研究将聚焦:
1、神经活动监测:结合钙成像与电生理技术,揭示感觉运动整合的神经基础。
2、户外实验扩展:通过“Animal-in-the-Loop”系统研究自然环境中昆虫的行为适应性。
仿生应用:将昆虫的高效算法应用于机器人导航与人工智能设计,解决复杂环境下的任务执行问题。
结语:小昆虫与大启示
这项研究不仅为理解生物适应性行为提供了新工具,也为仿生机器人、智能传感器及微型计算系统的开发开辟了道路。在人工智能与机器人技术面临算力瓶颈的今天,昆虫的“具身智能”或许能为高效自主系统的设计带来革命性灵感。
在生命科学与工程学的交叉领域,掌握昆虫行为密码的研究者,正引领下一代仿生技术的浪潮。
阅读英文原文:https://www.mdpi.com/2658182
期刊主页:https://www.mdpi.com/journal/applsci
Applied Sciences 期刊介绍
主编:Prof. Dr. Giulio Nicola, Cerullo, Politecnico di Milano, Italy
期刊主题涵盖应用物理学、应用化学、工程、环境和地球科学以及应用生物学的各个方面。
2023 Impact Factor:2.5
2023 CiteScore:5.3
Time to First Decision:18.4 Days
Acceptance to Publication:2.9 Days


转载本文请联系原作者获取授权,同时请注明本文来自MDPI开放科学科学网博客。
链接地址:https://wap.sciencenet.cn/blog-3516770-1485721.html?mobile=1
收藏