
随着自动驾驶技术的快速发展,人机协同驾驶已成为智能驾驶领域的重要研究方向。然而,仅依赖自动驾驶技术完全控制车辆,仍存在一定风险,可能导致事故隐患。那么,当人类驾驶员与自动化系统共同操控车辆时,如何实现高效协作,既确保安全又优化驾驶体验?
Applied Sciences 期刊发表了一项名为“基于博弈论的人机协作驾驶交互控制”的研究,为这一复杂问题提供了创新性的解决思路。
让自动驾驶与人类驾驶员无缝协作
人机协同驾驶需要应对复杂的驾驶环境与突发状况,尤其在紧急时刻,如何让人类与智能系统实现无缝配合是关键。研究团队研究小组提出了一种基于博弈论的交互控制方法,该方法在考虑自我车辆驾驶员的控制命令的情况下,模拟自动驾驶系统与周围不同驾驶风格的车辆之间的博弈论行为。
为何选择博弈论?
现实驾驶场景中,人类驾驶员与自动驾驶系统并非独立运作,而是持续进行信息交换并对可能的状况做出反应。博弈论有助于分析自我车辆与周围车辆之间的动态关系。
博弈论:从理论到实践的创新应用
博弈论是研究竞争与合作中决策过程的数学工具。在本研究中,博弈论被巧妙地应用于人机驾驶系统设计,带来了以下技术亮点:
1.博弈论与分布式控制结合:采用博弈论模型和分布式模型预测控制 (DMPC),有效应对邻近车辆行为的不确定性。
2.个性化驾驶行为模拟:通过大脑情绪学习回路模型 (BELCM),BELCM用于模拟自我车辆内的驾驶员行为,而周围车辆则使用不同的成本函数建模以模拟驾驶风格 (例如,攻击性、谨慎性)。
3.动态调整控制权:系统根据驾驶安全场的评估,在关键时刻动态分配控制权,防止危险操作。
高速变道场景下的安全控制
变道是驾驶中典型且复杂的行为,特别是在高速行驶场景下,更容易引发交通事故。本研究针对高速变道场景,提出了一种基于非合作博弈的安全避障控制方法。当驾驶员选择变道时,系统通过实时分析驾驶员意图,判断如何辅助或接管驾驶,从而有效避免潜在风险。
1.驾驶权限整合:整合驾驶员和自动化系统的操作指令,根据场景动态分配控制权限。
系统总体框架 (见图1):

图1. 系统总体框架。
2.情感学习模型:通过BELCM模拟驾驶员行为,并结合驾驶环境信息实时调整控制策略。
通过设计一种基于大脑情绪学习回路模型 (BELCM) 的驾驶员控制模型 (图2),系统能够模拟驾驶员的决策过程。结合纵向控制与横向控制,它使驾驶员和自动驾驶系统能够在车辆控制上实现无缝衔接。
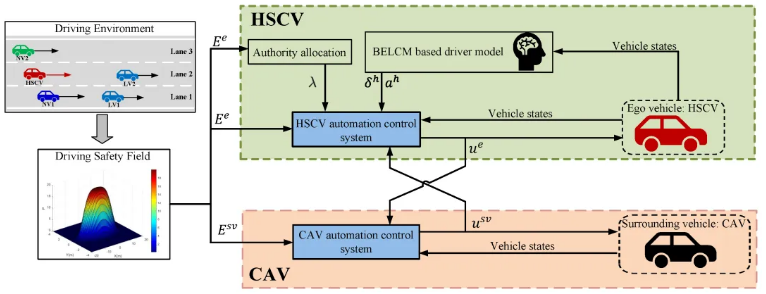
图2. 基于BELCM的驾驶员模型框架。
3.多风格交互优化:通过驾驶风格代价函数建模车辆之间的交互,优化安全反应。
4.最优策略求解:采用非合作博弈方法寻找最优避障策略,提升系统可靠性。

图3. HSCV安全驾驶的两种测试场景。
未来出行的无限可能
这一研究成果不仅是学术上的突破,更在智能交通、驾驶辅助系统 (ADAS) 和自动驾驶等领域具有广泛应用前景。面对复杂路况和突发状况,基于博弈论的交互控制技术为车辆决策提供了精确的理论支撑,同时提升了用户信任感。
博弈论的未来潜力
随着自动驾驶技术的成熟,人与智能系统的深度互动将成为驾驶体验的核心。博弈论驱动的协同控制模型,不仅能增强系统在复杂环境中的应对能力,还能提供更加流畅、安全的驾驶体验。
在智能交通的未来赛道上,掌握这一技术的企业和研究机构将抢占先机,为全球出行方式带来革命性变化。
原文出自 Applied Sciences 期刊:https://www.mdpi.com/2076-3417/14/6/2441
期刊主页:https://www.mdpi.com/journal/applsci
Applied Sciences 期刊介绍
主编:Giulio Nicola Cerullo, Politecnico di Milano, Italy
期刊主题涵盖应用物理学、应用化学、工程、环境和地球科学以及应用生物学的各个方面。
2023 Impact Factor:2.5
2023 CiteScore:5.3
Time to First Decision:18.4 Days
Acceptance to Publication:2.9 Days


转载本文请联系原作者获取授权,同时请注明本文来自MDPI开放科学科学网博客。
链接地址:https://wap.sciencenet.cn/blog-3516770-1473508.html?mobile=1
收藏