
1.文章导读
随着计算机科学和人工智能的快速发展,多智能体系统 (MASs) 的协同控制在过去几十年中在物理和工程领域取得了显著进展,包括一致性控制、包容控制、编队控制和群集等。作为协同控制的一个重要分支,编队控制旨在使一组能够进行信息交互的智能体根据任务要求形成所需的编队构型。在民用领域,编队控制能够提高任务执行效率和质量、降低成本和提高作业的安全性。在军用领域则能够提高作战效率和灵活性、扩大侦察和搜索范围和提供快速响应和打击能力。近年来,多智能体系统编队控制的研究受到了众多专家学者的重视,来自国防科技大学智能科学学院的牛轶峰教授及其团队在 Drones 期刊发表了文章,从工程实际面临的多约束强耦合问题出发,改进一致性分析方法,提出了一种基于状态反馈的控制协议,极大降低了控制器设计的保守性,在面对时变时延、外部干扰、执行器故障和随机切换拓扑时,系统具有更快的反应速度和更强的鲁棒性,该项研究对于多智能体系统时变编队轨迹跟踪控制的发展具有重要意义。
2.研究过程与结果
首先,大多数现有的容错控制方法要么采用自适应控制技术或神经网络模型来估计未知有界的故障系数,要么假设故障系数已知。这导致控制器过度依赖先验信息,削弱了系统应对意外事件的适应性。然而,在实际情况中,部分失效的小故障发生的概率远高于完全失效故障发生的概率。基于执行器故障的特征,作者建立了一个故障分布模型,该模型能更好地描述实际中故障的发生情况,使控制器设计更加合理、系统更加鲁棒。其次,半马尔科夫切换拓扑提供了一种更灵活的通信连接策略,使多智能体系统能够更好地适应复杂环境和任务需求的变化。在文章中,作者提出了一种基于凸函数的半马尔科夫切换策略,将通信拓扑的变化建模为随机过程,以应对复杂环境带来的不利影响。随后,作者提出了一种新颖的具有时变延迟的分布式状态反馈控制协议,以确保多智能体系统能够维持预设的编队构型。为了降低系统所受外部干扰的影响,引入了H∞性能指标以增强控制器的鲁棒性。此外,作者通过构建先进的李雅普诺夫-克拉索夫斯基泛函并利用倒数凸组合理论,极大提高了系统的时延容许上界和降低了保守性,同时将时变编队控制问题转化为渐近稳定性问题,实现了问题的解耦。进一步,通过求解线性矩阵不等式获得了系统稳定性的充分条件。
文章中作者通过三个仿真示例验证了所提方法的有效性和优越性。示例一以包含四个智能体的系统为基础,在考虑外部干扰和时变通信时延的情况下,与现有文献进行比较,结果表明文章提出的方法所设计的控制器收敛速度更快、性能更好、具有更大的时延容许上界,并且在面对外部干扰时具有更强的抑制能力。与现有文献方法相比,示例二证明了文章提出的方法在多智能体系统面临执行器故障和半马尔科夫切换拓扑时能够表现出更好的性能。针对系统中存在的时变通信时延、不确定参数、外部干扰、执行器故障以及半马尔科夫切换拓扑的强耦合问题,文章以包含六个智能体的系统为例,在示例三中首次证实了所提方法设计的控制器解决上述五种强耦合约束问题的可行性,为实际系统中多约束强耦合问题的解决提供了新的思路。
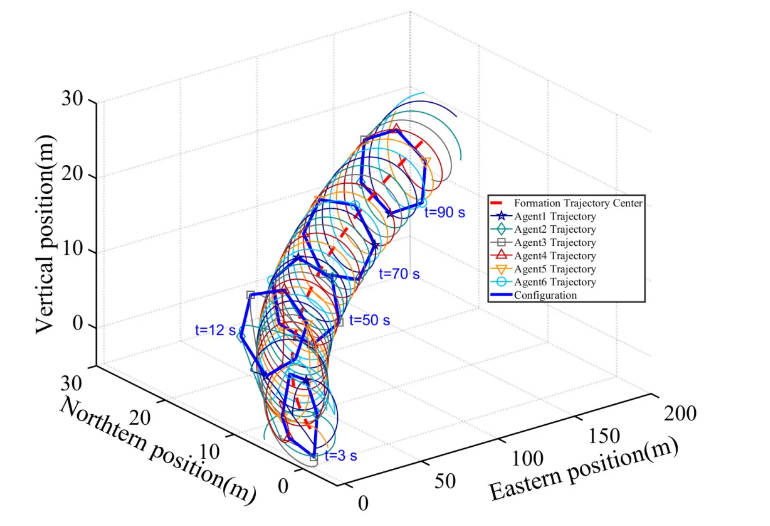
图为五种强耦合约束问题下三维时变编队轨迹跟踪。
3.研究总结
在这项研究中,文章针对半马尔科夫切换拓扑下具有时变通信时延和外部干扰的不确定多智能体系统,提出了一种先进的分布式状态反馈控制协议,实现了系统的容错时变编队轨迹跟踪控制。与以往的研究相比,基于李雅普诺夫-克拉索夫斯基稳定性理论和倒数凸组合理论,提出的方法显著提高了多智能体系统的时延容许上界。同时,通过引入H∞性能,增强了系统的收敛速度和鲁棒性。此外,文章提出的方法根据实际中执行器故障的特征构建了故障分布模型,并引入了基于凸函数的半马尔科夫随机过程来建模切换拓扑,以有效应对复杂环境带来的不利影响。更为重要的是,文章首次实现了受上述五个强耦合问题约束的多智能体系统的时变编队轨迹跟踪控制,这意味着更贴近实际的解决方案和更广泛的应用价值。未来该团队将在非线性多无人机系统的时变编队轨迹跟踪控制问题上继续深入开展相关研究。
原文出自 Drones 期刊:https://www.mdpi.com/3097982
期刊主页:https://www.mdpi.com/journal/drones
Drones 期刊介绍
主编:Diego González-Aguilera, University of Salamanca, Spain; Pablo Rodríguez-Gonzálvez, University of León, Spain
期刊主要涵盖无人机、无人机系统、远程驾驶航空器系统、水下无人机、无人地面载具、全自动驾驶和太空无人机等相关的最新科学技术及应用。目前期刊已被EI、Scopus和SCIE (Web of Science) 数据库收录,位于Q1分区。
2023 Impact Factor:4.4
2023 CiteScore:5.6
Time to First Decision:19.2 Days
Acceptance to Publication:2.6 Days


转载本文请联系原作者获取授权,同时请注明本文来自MDPI开放科学科学网博客。
链接地址:https://wap.sciencenet.cn/blog-3516770-1470049.html?mobile=1
收藏