博文
Electronics 国立金乌工科大学——创新四轮转向移动机器人平台:自适应转向控制提升人工操作效率
||
随着自动驾驶技术的进步,移动机器人在制造、物流、零售、服务和农业等领域的应用大幅增加。其中,四轮移动机器人平台因其稳固性和灵活性被广泛采用。来自韩国国立金乌工科大学的Dong-Hyun Lee博士及其团队在 Electronics 期刊发表了文章,介绍了一个适用于室内空间的紧凑型四轮转向机器人平台,并开发了一种自适应四轮转向控制算法,对自动驾驶和转向算法领域的进一步研究具有重要意义 (图1)。
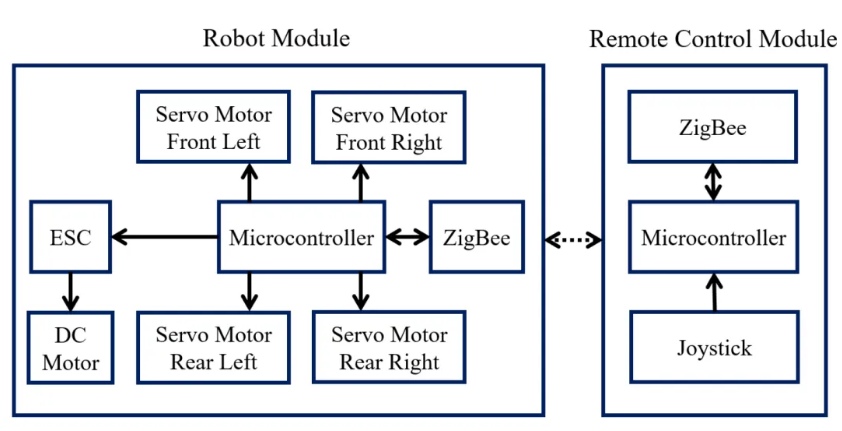
图1. 四轮四轮转向机器人系统架构。
研究过程与结果
文章首先比较了滑移转向、两轮转向和四轮转向等四轮移动机器人平台,同时回顾了关于提高四轮转向机构的机器人平台性能的研究工作,但这些调查并未考虑到用于教育和研究目的的紧凑型四轮转向机器人平台的开发,或操作员对四轮转向的直观手动控制。因此,本文引入了一种用于研究目的的新型紧凑型四轮转向机器人平台,机器人系统由机器人模块和遥控模块组成 (图2),机器人平台尺寸设计紧凑,使其能够在狭窄的室内或实验环境中有效运行。
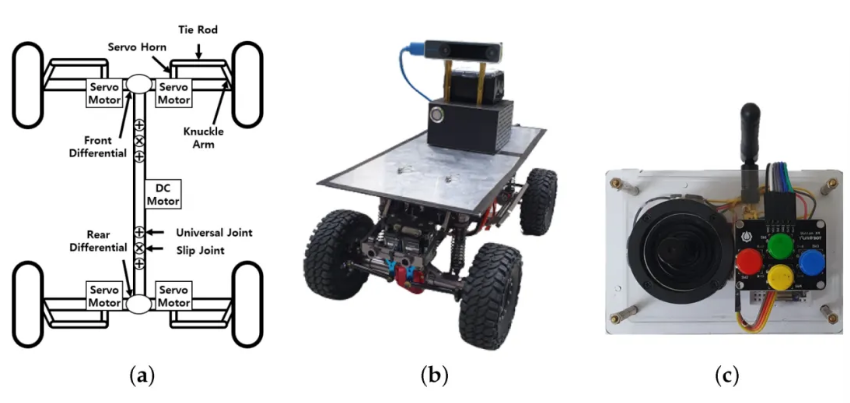
图2. (a)(b) 机器人模块;(c) 远程控制模块。
接着,文章提出了一种自适应四轮转向控制算法,旨在促进高效和直观的手动操作。这种转向控制算法的核心目标是根据所需的转向角度调整转向配置,以此来提高车辆的机动性并优化转向性能。在涉及较小目标转向角度的情况下,该算法仅激活前转向,同时保持后转向固定;当所需的转向角超过预定义的阈值时,该算法会与后转向机构接合以实现更小的转弯半径并提高机动性 (图3)。所提出的转向算法使操作员能够直观地手动控制四轮转向机器人,无需复杂的传感器阵列、复杂的动力学模型或复杂的优化算法。
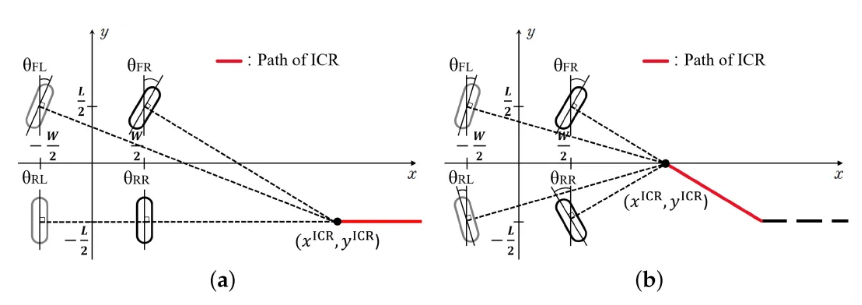
图3. (a) 前轮转向的ICR路径;(b) 前后轮转向的ICR路径。
最后,为了验证所提出的四轮转向机器人平台的转向精度和转向控制算法的效率,进行了一系列实验。在实验中,参与者使用操纵杆进行手动操作,比较了三种转向算法的效率:前轮转向 (FWS)、对称前后轮转向 (SFRWS) 以及所提出的自适应转向控制算法。实验结果表明,FWS算法的转向灵敏度较低,导致参与者在进行避障时需频繁倒退,而SFRWS算法虽然具有较小的转弯半径,但参与者常因高转向敏感性而难以保持直观控制。因此,所提出的自适应算法在不需要反向操作的情况下,成功实现了更高效的避障。
研究总结
本文介绍了一种专为研究目的设计的紧凑型四轮转向机器人平台,为不同场景下开发、验证导航和转向控制算法提供了宝贵工具。本文同时开发了用于直观手动操作的自适应四轮转向控制算法,结合了前后轮转向,提升了机器人在复杂环境中的机动性能,为自动驾驶和转向算法领域后续的研究提供了新的思路。未来的研究方向是为机器人平台配备先进的传感器,例如LiDAR和立体相机,以及通过将负载重量和转向输入速度等因素作为转向角度的决定因素来进一步提高转向算法的精度和稳定性。
原文出自 Electronics 期刊:https://www.mdpi.com/2441052
期刊主页:https://www.mdpi.com/journal/electronics
Electronics 期刊介绍
主编:Flavio Canavero, Politecnico di Torino, Italy
期刊涵盖的研究领域包括但不限于:电子材料、微电子学、光电子学、工业电子、电力电子、生物电子、微波和无线通信、计算机科学与工程、系统与控制工程、电路和信号处理、半导体器件、人工智能、电动和自动驾驶汽车、量子电子等。期刊致力于快速发表与广泛电子领域相关的最新技术突破以及前沿发展。
2023 Impact Factor:2.6
2023 CiteScore:5.3
Time to First Decision:16.8 Days
Acceptance to Publication:2.6 Days


https://wap.sciencenet.cn/blog-3516770-1457898.html
上一篇:JMMP:清华大学梁啸宇博士创建特刊——粉末床熔合技术的进展
下一篇:两位院士领衔,现代数学物理新刊2024重磅上线——Modern Mathematical Physics