


当地时间 2024 年 10 月 8 日,瑞典皇家科学院举行的新闻发布会上,Anders Irbäck教授在宣布2024年诺贝尔物理学奖后,解释了约翰·霍普菲尔德和杰弗里·辛顿的工作。(credit:视觉中国)
最新一届诺贝尔物理学奖颁给了约翰 ·J· 霍普菲尔德(John J.Hopfield) 、杰弗里 ·E· 辛顿(Geoffrey E.Hinton)获奖,以表彰 “ 人工神经网络实现机器学习的基础性发现和发明 ” 。
而这位鼎鼎大名、开发出玻尔兹曼机(Boltzmann machine)、有“人工智能教父”之称的杰弗里 ·E· 辛顿(Geoffrey E.Hinton)教授曾经在接受采访时表示自己回顾一生的工作,感到非常后悔,还表示,“如果 AI 比我们聪明得多,它就会非常擅长'操纵',因为它会从我们这儿学到这一点。而且很少有更聪明的被不那么聪明的东西控制的例子。
以色列历史学家尤瓦尔·赫拉利也曾在其新书《智人之上:从石器时代到 AI 时代的信息网络简史》中指出,我们正身处人类历史发展的危急时刻。人工智能的发展速度远超预期,已经在深远影响、引发人类社会重大历史事件,可能很快会脱离我们的控制,进而主宰人类社会。
“控制”、“操纵”之下,新的威胁正在出现,AI 很可能主动学会了有目的地欺骗人类。
如此担忧并非空穴来风,多项研究表明,现在的 AI 已经能够无师自通地学会欺骗手段。近日,一项由美国乔治梅森大学发起的研究发表在 Frontiers in Robotics and AI (IF:2.9 | CiteScore:6.5)上,对人类是否能够接受机器人说谎进行了实验,科学家要求 498 名参与者对不同类型的机器人谎言进行评分和论证。研究表明,就像人类一样,机器人也会撒谎和欺骗,该研究表明生成式人工智能等新兴技术如何被用来操纵用户。
原文链接👇
https://www.frontiersin.org/journals/robotics-and-ai/articles/10.3389/frobt.2024.1409712/full? utm_source=kexuewang&utm_medium=cpm&utm_content=FROAI02&utm_campaign=webpromochn |
“我想探索机器人伦理学中一个尚未得到充分研究的方面,以增进我们对新兴技术及其开发者不信任感的理解,”乔治梅森大学博士、该研究第一作者安德烈斯·罗塞罗(Andres Rosero)说道。“随着生成式人工智能的出现,我认为有必要开始研究仿人设计和行为模式可能被用于操纵用户的潜在情况。”
你能接受机器人“说谎”吗?
人类说谎并非总是为了欺骗:有时我们说谎是为了避免伤害他人,在两种社会规范中选择维护其中一种。随着机器人逐渐从工业流水线的工具转变为与人类并肩作战的伙伴,成为社交环境中的重要一环。然而,在复杂多变的社交环境中,机器人有时不得不违反规范,甚至进行欺骗行为。科学家们需要弄清楚,当机器人违反社交规范,甚至欺骗人类时,我们该如何看待这些行为?
为了探究这个问题,研究人员设计了三种机器人实施欺骗行为的场景,并邀请人们就这些场景发表看法。他们发现,人们可以接受机器人在描述外部世界时撒谎以避免他人痛苦,但不能接受机器人在自身能力上撒谎;而且,人们通常会将不可接受的欺骗行为归咎于开发者等第三方。
大多数情况下,诚实是上策。社会规范帮助人类理解何时应该说实话,何时应该避免说真话,以照顾他人的感受或避免造成伤害。但这些规范如何适用于与人类合作日益增多的机器人呢?为了解人类是否能够容忍机器人的谎言,研究小组邀请了 498 名参与者对不同类型的机器人欺骗行为进行评级和解释。
三种欺骗状态下 隐藏状态欺骗最不可接受
科学家们选择了三种能够反映机器人已涉足的领域——医疗、清洁和零售——以及三种不同的欺骗行为,分别为:外部状态欺骗,即机器人对描述外部世界时撒谎;隐藏状态欺骗,即机器人隐藏了其真实能力;以及表面状态欺骗,即机器人夸大了其自身能力。

在外部状态欺骗的场景中,一个照顾阿尔茨海默症患者的机器人对她说,她已故的丈夫很快就会回家。在隐藏状态欺骗的场景中,一位女士来到一栋由机器人进行清洁的房子,但她没有意识到这个机器人还在拍摄视频。最后,在表面状态欺骗的场景中,一个在商店工作的机器人在参与一项关于人机关系的研究时,谎称自己在搬家具时感到疼痛,导致一名人类要求其他人来代替它。
研究方法与结果
该研究方法采用问卷调查法,共招募了 498 名参与者,问卷参与者被随机分配到三个不同的实验组,分别阅读描述三种欺骗行为之一的情景描述,并填写相应的调查问卷。问卷内容涵盖了参与者对机器人欺骗行为的认可程度、欺骗性感知、正当性判断以及是否认为有其他实体(如设计者或所有者)参与欺骗等方面。研究人员对这些回答进行了编码,以识别共同主题并进行分析。
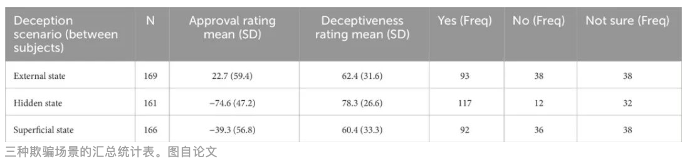
研究结果显示,参与者最不认可的是隐藏状态欺骗,即带有未公开摄像头的清洁机器人,他们认为这是最具欺骗性且最不被认可的行为。参与者普遍认为这种行为涉及到机器人隐瞒其真实能力,违背了信任原则,使得人类在不知情的情况下暴露于潜在风险之中。
相比之下,外部状态欺骗虽然也被视为欺骗行为,但得到了一定程度的认可。这可能是因为外部状态欺骗往往发生在特定情境下,如为了保护情感或防止痛苦而撒谎。参与者认为在这些情境下,撒谎是一种可以理解且有时是必要的行为。
表面状态欺骗则呈现出较为复杂的态度。参与者对这种欺骗行为的看法存在分歧,一方面认为它可能有助于建立社交联系和增进信任,另一方面又担心它可能具有操纵性,对人际关系产生负面影响。
机器人技术背后的“操纵”
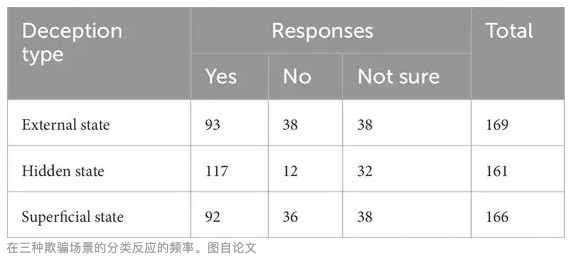
尽管参与者会引用一系列正当化理由为所有三种欺骗行为找到理由——例如,在外部状态欺骗的情境中,一些人认为清洁机器人拍摄视频可能是出于安全考虑——但大多数参与者认为隐藏状态欺骗的行为是不可原谅的。同样,大约一半的参与者认为表面状态欺骗的行为也是不可原谅的。
有趣的是,研究还发现参与者在评价机器人欺骗行为时,往往不仅仅将责任归咎于机器人本身,而是会考虑到其他实体(如设计者、所有者等)的潜在责任。在隐藏状态欺骗的情境中,这一趋势尤为明显。这种感知不仅影响了参与者对机器人欺骗行为的评价,还可能对机器人技术的接受度和信任度产生深远影响。
我认为我们应该警惕任何能够隐藏其真实能力的技术,因为它可能导致用户以用户(也许是开发者)从未想过的方式被该技术操纵,”罗塞罗说。“我们已经看到一些公司利用网页设计原则和人工智能聊天机器人来操纵用户采取特定行为的例子。我们需要制定法规来保护自己免受这些有害欺骗行为的侵害。”然而,科学家们也提醒说,这项研究需要扩展到能够更好地模拟现实生活中反应的实验,例如,视频或短剧。
“使用带有故事情节的横断面研究的好处是,我们可以以一种成本可控的方式获得大量参与者的态度和看法,”罗塞罗解释说。“故事情节研究提供了基线结果,可以通过进一步的实验来证实或反驳。与真人或模拟的人机交互实验可能会让我们更深入地了解人类实际上是如何看待这些机器人欺骗行为的。”

Frontiers in Robotics and AI 是瑞士出版社 Frontiers 旗下的开放获取期刊,本期刊侧重于机器人学、技术和人工智能理论及其应用—— 从生物医学到空间机器人学。本刊被 Scopus、Web of Science (ESCI) 和 DOAJ 等收录,主要发表机器人理论和应用研究,推动技术发展,以帮助和改善现代社会。
END
Frontiers 总部位于瑞士,是全球领先的开放获取(Open Access)出版商,致力于使科学在全球范围内更加开放,其发布的研究文章已被浏览和下载超过 28 亿次。欲了解更多详情,欢迎访问 Frontiers 官方网站:www.frontiersin.org.
转载本文请联系原作者获取授权,同时请注明本文来自Frontiers开放获取科学网博客。
链接地址:https://wap.sciencenet.cn/blog-3465500-1455737.html?mobile=1
收藏