
 精选
精选
A Fully Biomimetic Flexible Sensor Inspired by the Natural Layered Structure of Eggshells for Multimodal Human-Computer Interaction
Weiwei He, Yanzhen Zhang*, Puye Zhang, Yunlong Liu, Guanyang Wu, Boce Xue, Guoqing Hu, Runsheng Li, Chao Zheng, and Dongzhi Zhang*
Nano-Micro Letters (2026)18: 244
https://doi.org/10.1007/s40820-026-02101-2
本文亮点
1. 自上而下,完全仿生:本工作提出了一种全仿生传感器的设计理念。通过采用混合制造技术逐层仿生蛋壳的天然层状结构,开发了一种具有多种传感模式的柔性传感器。
2. 功能协同,模态切换:这种仿蛋壳多功能混合柔性传感器(EMHFS)包含四个功能层:用于非接触式传感的摩擦电层、用于压力传感的压阻层以及用于定向吸湿、透气和抗菌的亲水-疏水层。EMHFS的仿蛋壳结构实现了协同功能,从而能够在接触式和非接触式传感模式之间无缝切换。
3. 天然稳定,应用强广:EMHFS在多模态人机交互应用中展现出卓越的性能,包括手势控制的机械手、可穿戴无人机控制系统以及非接触式屏幕密码和手势解锁,同时对呼吸和脉搏等微弱生理信号也表现出惊人的灵敏度。
研究背景
经过数百万年的自然选择,生物体进化出了具有独特功能的复杂结构,为设计先进的功能材料和器件提供了丰富的灵感。通过复制生物体的结构特征和功能机制,仿生工程已成为解决柔性电子领域关键挑战的有力策略,尤其是在开发用于人机交互的高性能传感器方面。基于仿生设计的柔性传感器因其能够通过模仿生物体的机械柔韧性和结构来提升传感器性能而备受关注,在可穿戴健康监测、智能机器人和智能交互设备等领域展现出巨大的应用潜力。然而,尽管研究取得了显著进展,但目前的仿生柔性传感器仍然面临着一些明显的局限性,阻碍了它们在复杂的多模态人机交互场景中的实际应用。其中一个主要瓶颈是现有仿生策略的不完善。大多数传感器仅模仿目标生物体的单一结构特征,导致功能集成度低且传感方式有限。尽管多仿生策略能够协同增强传感器的性能,但其仍局限于单接触传感模式下的性能优化,缺乏环境适应性,难以满足智能交互场景的多样化需求。这些挑战凸显了迫切需要一种能够完全集成、功能协同地复制单个自然生物体多级结构的仿生设计,从而实现多模式传感和环境适应性。
内容简介
基于天然微结构仿生的柔性传感器快速发展,激发了研究者对人机交互多功能系统的开发兴趣。然而,现有仿生传感器大多难以实现多模态传感集成,制约了其实际应用。中国石油大学(华东)张彦振教授、张冬至教授团队提出一种全仿生传感器设计理念,通过混合制造技术逐层仿生蛋壳天然层状结构,制备了具备多模态传感功能的柔性传感器。这种蛋壳仿生多功能混合柔性传感器(EMHFS)集成四个功能层:用于非接触传感的摩擦电层、用于压力传感的压阻层,以及实现定向湿气传导、透气性和抗菌性能的亲水-疏水复合层。蛋壳仿生结构赋予器件协同功能,可无缝切换接触与非接触传感模式。EMHFS在多模态人机交互应用中展现出卓越性能,包括手势控制机械手、可穿戴无人机操控系统、非接触式屏幕密码及手势解锁,同时对呼吸、脉搏等微弱生理信号也表现出显著灵敏度。这种全仿生策略为先进柔性多功能人机交互器件提供了创新解决方案。
图文导读
I EMHFS的灵感来源和功能演示
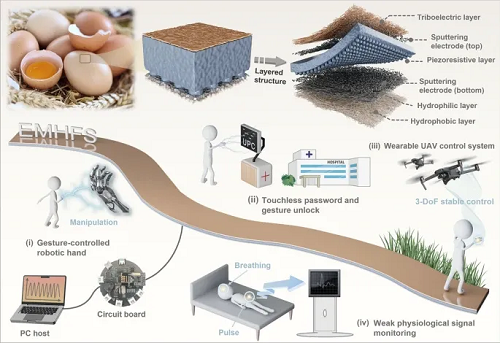
鸡蛋壳作为自然界生物矿化的典型范例,并非均质结构,而是由外到内形成功能互补的分层结构,各层界限清晰且协同作用,从而共同实现“保护内部胚胎”的核心目标(图1a)。本研究以鸡蛋壳天然的分层结构为灵感,开发了一种自上而下全仿生的柔性传感器(图1b)。这种鸡蛋壳启发的多功能混合柔性传感器(EMHFS)由摩擦电层、压阻层、亲水层和疏水层四部分组成(分别对应于鸡蛋壳的角质层、海绵层与乳头层、壳膜外层和壳膜内层),各层之间具有独特的功能特性且互相不干扰。位于EMHFS顶部的摩擦电层由静电纺丝获得的PVDF/MXene/BaTiO₃纳米纤维组成。基于摩擦电效应和静电感应的耦合,EMHFS实现了非接触式传感功能(图1c i)。鸡蛋壳中乳头层的作用是缓冲外部冲击力,海绵层则是提供主要的力学强度和抗压能力,这种压力梯度的功能协同灵感被用于压阻层的设计。通过模具法制备了具有乳头状微结构的PDMS/CNTs压阻层。乳头状微结构能够灵敏感知外部微小压力的变化,类海绵层的部分则可以对施加的大压力产生反馈。这种设计方法赋予了EMHFS优异的压力传感性能(图1c ii)。鸡蛋壳的壳膜外层和壳膜内层为紧密排列成两层的交织纤维结构,功能是防微生物入侵的同时允许气体交换。类似地,在EMHFS的底部,首先通过静电纺丝获得亲水层的PAN纳米纤维,紧接着在亲水层上继续纺丝疏水层TPU纳米纤维,最后得到紧密结合的双层纤维膜,在保持优异透气性的同时实现定向吸湿排汗功能(图1c iii)。通过磁控溅射银粒子到亲水层上表面获得了抗菌性能,同时作为压阻层压力传感的下部电极。摩擦电层底部的镀银层则用于压力传感的上部电极和非接触传感的单电极。
类鸡蛋壳的全仿生策略赋予了EMHFS多功能协同的分层结构,在多模式的手势人机交互方面显示出巨大的潜力。例如接触模式下的手势控制机械手(图1d i)和无人机控制系统(图1d iii),非接触模式下的屏幕密码和手势解锁(图1d ii)。得益于传感器的一体化设计,可以自由选择接触或非接触方式,解决了不同场景下的操作需求。此外,面向人体产生的微小压力场景时,实现了不同环境下对微弱生理信号的精准监测。
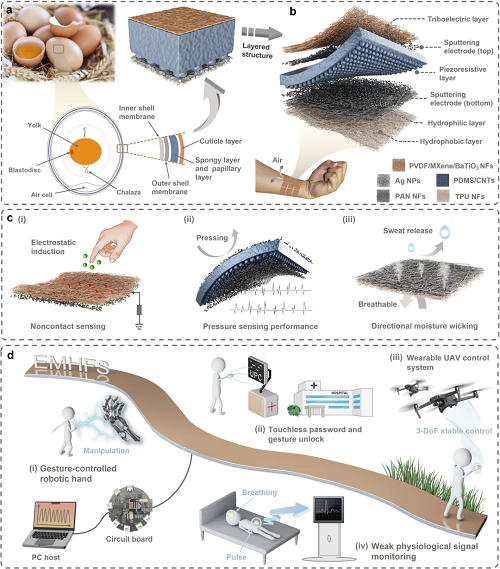
图1. EMHFS的设计灵感和多功能应用。a. 鸡蛋结构示意图,展示了蛋壳的天然层状结构。b. EMHFS的整体结构。c. EMHFS的功能组件包括:(i) 摩擦电层的非接触式传感;(ii) 压阻层的压力传感;(iii) 亲水-疏水层的定向吸湿。d. EMHFS在各种场景中的应用包括:(i) 手势控制的机械手;(iii) 无人机控制;(iv) 接触模式下的微弱生理信号监测;以及(ii) 非接触模式下的非接触式密码和手势解锁。
II EMHFS的工作机理及摩擦电性能
EMHFS在非接触传感模式时的工作原理是基于摩擦电效应和静电感应,两者结合实现了机械动作到电信号的转化。使用人的手指在非接触模式下操作一个EMHFS单元来对电输出性能进行定量分析。图2d-f分别显示了EMHFS在2 Hz运动频率和40%相对湿度下的开路电压、短路电流和传递电荷。随着手指和EMHFS之间距离的增加,所有的电力输出明显降低。随着距离从0.5 cm增加到2 cm,平均峰值电压从30.25 V降低到3.14 V,电流从82.62 nA降低到6.91 nA,转移的电荷从6.27 nC到1.09 nC。图2d中的插图显示EMHFS能感应到的最远距离为2 m,此时电压峰值为34 mV。图2g-i测试了距离为0.5 cm,相对湿度为40%时,手指运动频率对EMHFS输出性能的影响。结果表明,随着运动频率的增加,电压和电流变大。在5 Hz频率时,输出电压和电流分别达到20.37 V和48.84 nA。在不同的运动频率下,转移的电荷变化量较小(ΔC=0.25 nC),这保证了EMHFS在距离检测方面的可靠性。此外,还探究了距离为0.5 cm,运动频率为2 Hz时,相对湿度对EMHFS性能的影响(图2j-l)。当相对湿度从20%增加到80%时,平均峰值电压从16.62 V降低到6.34 V,相应的电流从36.51 nA降低到12.96 nA,转移的电荷也从3.49 nC降到了0.54 nC。本研究的日常环境中,相对湿度始终在40%左右(人类舒适的相对湿度范围为40%-60%),表明EMHFS可以在其操作环境中提供足够的响应。
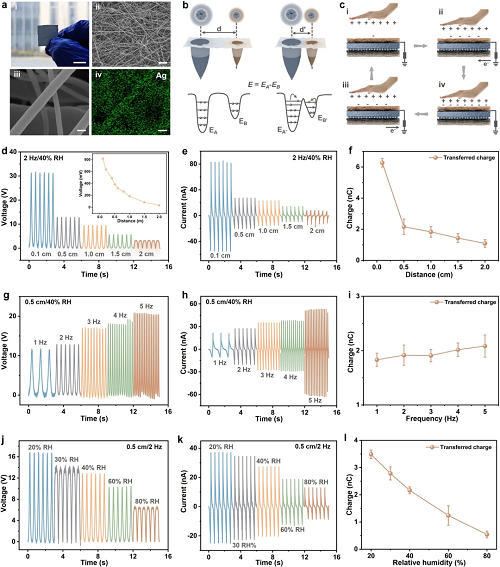
图2. EMHFS的工作原理和电输出。a. (i) EMHFS的数码照片。比例尺:1 cm。摩擦电层的扫描电镜图像:(ii) 上图,比例尺:10 μm;(iii) 下图;(iv) 银元素分布图。比例尺:200 nm。 b 电子云模式和 c 非接触式传感的基本原理。d–f 分别为在 2 Hz 频率和 40% 相对湿度下,距离对 EMHFS 开路电压、短路电流和转移电荷的影响。g–i 在 0.5 cm 距离和 40% 相对湿度下,EMHFS 在 1 至 5 Hz 不同频率下的电输出。j–l 相对湿度对 2 Hz 频率和 0.5 cm 距离下 EMHFS 电输出的影响。
III EMHFS的定向吸湿、透气性和抗菌性能
为了评估EMHFS的定向输水性能,首先研究了亲疏水纳米纤维膜的润湿性。图3c, d显示了纳米纤维层表面水接触角(WCA)随时间变化的光学图像和变化。在PAN纳米纤维层表面,WCA在10 s内从最初的72.6°动态降低到8.5°,展示了纳米纤维PAN优异的亲水性。相反地,TPU纳米纤维表现出稳定的疏水性。观察到TPU纳米纤维层表面初始WCA为117.3°,在25 s内几乎没有扩散行为。随后,通过亲疏水膜两侧水滴的动态传递过程监测膜的输水能力。如图3e所示,当水滴接触PAN纳米纤维层表面时,水滴迅速渗透扩散,在36 s内达到完全润湿。疏水层的存在阻挡了水滴透过亲水层滴落。当膜翻转,水滴接触到TPU纳米纤维层时,水滴在16 s内渗透进入亲水层,直至完全润湿甚至滴落(图3f)。这些结果表明,通过逐层纺丝获得紧密结合的亲疏水层,可以单向地将水滴从薄膜的一侧输送到另一侧。事实上,EMHFS的定向吸湿能力是通过纤维层孔径梯度和亲疏水差异性引起的推拉效应实现的。在这项研究中,从宏观作用力到微观压力差,全面分析了定向吸湿的工作原理和影响定向吸湿功能的关键参数。
正如鸡蛋壳的壳膜外层和壳膜内层允许气体交换一样,同样具有多孔结构的多层堆纳米纤维膜的EMHFS具有出色的透气性和透湿性。将EMHFS、聚二甲基硅氧烷(PDMS)薄膜、聚对苯二甲酸乙二醇酯(PET)薄膜、和聚酰亚胺(PI)薄膜分别覆盖在装满水的烧杯中,在室温和40% RH下监测一周内含水量的变化(图3g)。以不带盖子的烧杯作为对照组。如图3h所示,对照组和EMHFS都随着天数增加持续失水,而覆盖有PDMS、PET和PI薄膜的烧杯中水量几乎保持不变。这些测试结果体现了EMHFS良好的透湿性。此外,PAN亲水纳米纤维上的银层不仅可以用作电极,还赋予了EMHFS显著的抗菌特性。为了评价EMHFS的抗菌活性,采用革兰氏阴性大肠杆菌(E. coli)和革兰氏阳性金黄色葡萄球菌(S. aureus)为病原菌,利用平板菌落计数法进行检测。通过两种菌株的光密度(OD)值观察了样品中活细菌浓度的变化(图3i)。随着时间的增长,两种细菌在空白对照样品中的浓度持续增大,而EMHFS中的OD值几乎恒定不变。在共培养24小时后,EMHFS实现了92.9%的大肠杆菌抗菌率和91.2%的金黄色葡萄球菌抗菌率。EMHFS显著的抗菌能力可归因于银层中的银纳米粒子能够渗透到细菌细胞中,与巯基(-SH)蛋白酶结合破坏细菌结构,最终导致细菌死亡。
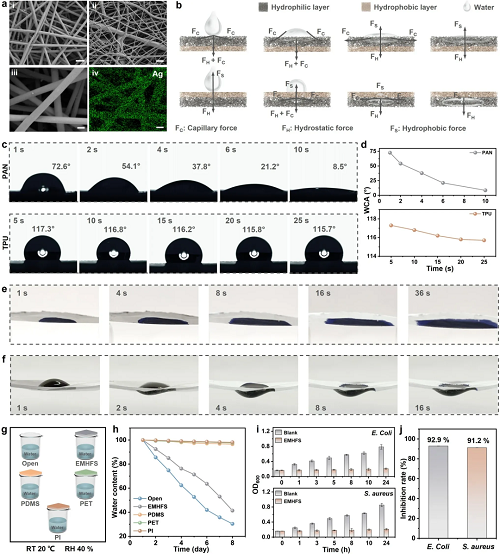
图3. EMHFS 的定向吸湿、透气性和抗菌性能。a (i) PAN 纳米纤维层的 SEM 图像。比例尺:1 μm。(ii) TPU 纳米纤维层。比例尺:4 μm。(iii) PAN-Ag 电极,以及 (iv) 元素分布图像。比例尺:300 nm。b 提出了 EMHFS 由疏水层和亲水层构成的定向吸湿机制。 c、d 纳米纤维随时间变化的水接触角。e 亲水性 PAN 纳米纤维和 f 疏水性 TPU 纳米纤维上表观水传输过程的宏观光学图像。g 不同材料透气性实验的示意图和 h 测试曲线。i 与空白样品和 EMHFS 样品共培养后,大肠杆菌和金黄色葡萄球菌的光密度随时间变化的曲线。j EMHFS 共培养 24 小时后对大肠杆菌和金黄色葡萄球菌的抗菌率。
IV EMHFS的压力传感机理及性能
在接触模式下,EMHFS的压力传感的性能取决于压阻层结构的设计。压阻层的设计概念来自鸡蛋壳的海绵层和乳头层结构,通过模版法在扁平层的表面构建乳头状微结构,在实现高灵敏度的同时扩大了压力检测的范围。乳头状微结构部分在面对微小压力时,能提供可压缩的微观形貌,是实现高灵敏度的关键因素。扁平层与蛋壳的海绵层类似,可以承受更高压力并作出响应,决定了EMHFS的压力检测上限。图4a描述了EMHFS的压力传感原理,同时建立了对应的等效电路来描述电阻贡献。通过建模和有限元模拟,分析了不同微结构在相同应变下的压缩变形行为(图4c)。
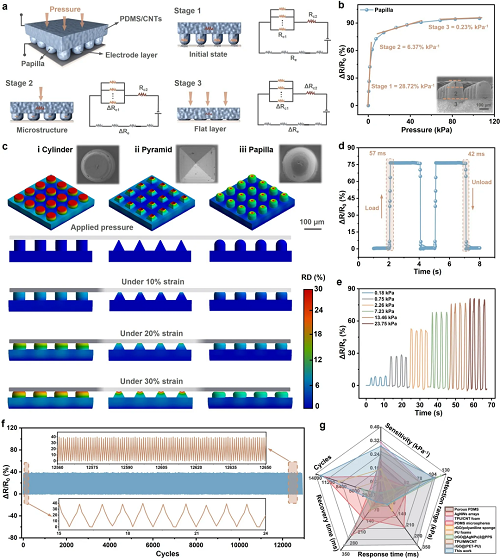
图4. EMHFS 的压力传感机制和性能。a EMHFS 压阻层上乳头状微结构的传感机制及其对应的等效电路图。b EMHFS 的灵敏度曲线。c 有限元分析模拟了 (i) 圆柱形、(ii) 锥形和 (iii) 乳头状微结构在加载条件下的压缩变形行为及其对应的模型。d EMHFS 在 10 kPa 压力下的响应和恢复时间。 e. EMHFS在不同压力下的响应曲线。f. EMHFS在1.5 kPa压力下进行13000次循环稳定性测试。g. EMHFS性能与以往研究的比较。
V EMHFS的应用
本研究开发的对鸡蛋壳层状结构进行全仿生的多功能混合柔性传感器,同时具备接触传感和非接触传感性能,可以根据需求随意切换传感模式,在多模态的人机交互领域表现出明显的应用优势。在接触传感模式下,EMHFS表现出优异的检测能力和出色的运行稳定性,实现了从低压到高压的宽范围响应。这种类似于蛋壳内部抗梯度压力冲击的特性使其在人体微弱信号监测(如呼吸和脉搏监测)、手势控制机器手和无人机系统的控制方面具有综合优势。
通过模拟在人体在静息和运动状态下佩戴EMHFS的场景,评估其在汗水渗透条件下的稳定性(图5c)。研究结果显示,配备了定向排湿功能的EMHFS几乎没有受到影响,仍然具有清晰的脉搏特征波。进一步地,将EMHFS作为传感单元,贴附在拇指、食指、中指、无名指和小指的关节处来构建应变传感阵列。基于该传感阵列的人机交互系统实现了人手动作向机械手的精准控制。
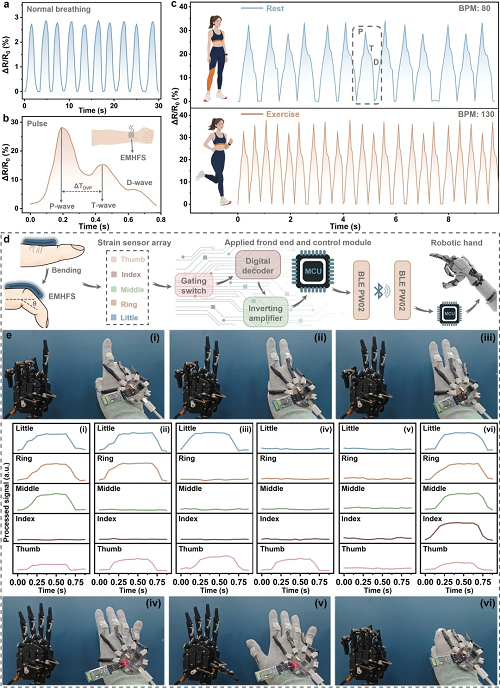
图5. EMHFS用于弱生理信号监测和手势控制机械手。EMHFS对a呼吸信号和b脉搏信号的电阻响应。c. EMHFS在志愿者休息和运动状态下的电阻感知信号。d. 手势控制机械手系统中各模块的示意图。e. 机械手通过微控制器模拟手势变化,并显示不同手势下五个通道的电阻响应。
鉴于EMHFS具有优异的接触传感性能,进一步探索了其在更复杂人机交互场景中的潜在应用。特种部队在执行任务时,往往需要在复杂的环境中保持低姿态和高机动性。在这项研究中,基于EMHFS传感阵列开发的无人机控制系统无需像遥控器那样频繁观察和操作,士兵在丛林环境中可以在不暴露自身位置的情况下,通过隐蔽的手势静默控制无人机进行侦察(图6a)。
根据EMHFS在宽压力范围内的高敏特性,定义了操纵无人机运动的控制规则(图6d)。在垂直方向上(上下),拇指弯曲产生的信号被控制端接收,无人机开始上升。当拇指弯曲信号变化达到阈值时,控制端判定无人机进入悬停状态。此时无人机的飞行高度被锁定,拇指的弯曲程度不再控制飞行高度,悬停的持续时间由信号维持在阈值区间的时长决定。当拇指恢复到初始角度时,无人机解除悬停状态并开始执行着陆动作(图6d (i))。在水平方向上,每根手指有着一样的控制规则:当控制端接收到手指弯曲信号时,无人机开始沿着对应方向做匀速运动。直到手指恢复初始弯曲角度时,无人机停止运动(图6d (ii))。值得注意的是,实现无人机的复杂运动是拇指和其他手指协同控制的结果。在实际使用时,拇指率先控制无人机上升到指定高度(图6e)。当拇指弯曲信号保持在悬停区间内时,食指、中指、无名指和小指分别操控无人机向左、右、前和后运动(图6f, g)。最后,再由拇指控制无人机完成降落。总的来说,本研究开发的可穿戴无人机控制系统通过五个通道的手指动作与无人机三维空间运动的精准映射,实现了对无人机的三自由度(3-DoF)运动稳定控制。
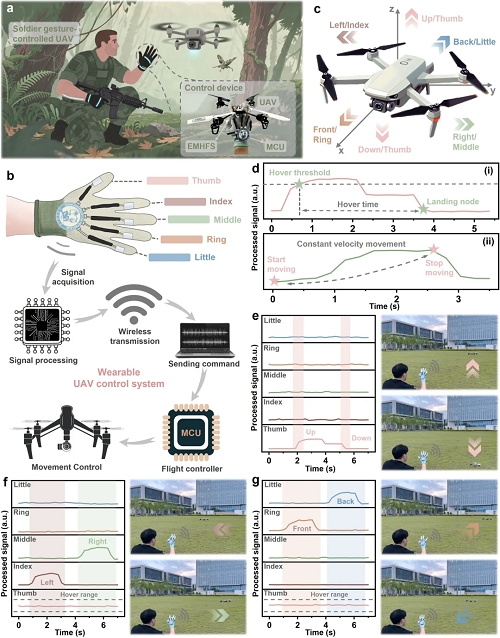
图6. 基于EMHFS的可穿戴无人机控制系统实现三自由度稳定控制。a. 士兵在寂静的丛林环境中通过手势控制无人机的示意图,以及控制装置的照片。b. 基于EMHFS的可穿戴无人机控制系统的示意图,展示了各个模块及其操作流程。 c 系统中的五个通道对应于无人机控制的三自由度 (3-DoF)。d 通过 (i) 拇指通道和 (ii) 其他手指通道操控无人机运动的控制规则。EMHFS 作为飞行控制器,控制无人机在 e 垂直方向、f 横向和 g 纵向方向上的运动,并发出相应指令信号。
尽管接触式屏幕传感器在医疗领域应用广泛,但随着医疗技术的不断进步以及对医疗健康要求的日益提高,其局限性也愈发凸显。在医院这样病原体密集的环境中,接触式屏幕在使用过程中与患者身体直接接触,极易沾染病菌,成为交叉感染的潜在源头。鉴于EMHFS在非接触传感模式下具有优异的摩擦电性能,基于EMHFS开发了智能非接触式屏幕控制系统并成功演示了无接触屏幕密码和手势解锁应用。医护人员操作屏幕实现无接触交互,可避免交叉感染,适用于医院公共设备场景中,体现了EMHFS在无接触人机交互领域的应用价值(图7a)。
测试了手在EMHFS单元阵列上以不同姿态移动时,每个单元的响应信号。如图7c所示,3D信号图清楚地显示了响应传感单元产生的电信号响应与手涉及到的传感单元位置一致,不同姿态对应的信号强度和分布差异显著,表明感知设备可以区分手部动作的空间姿态,为手势识别的多样性提供了支持。进一步地,设计了实时智能屏幕密码和手势解锁界面。从0-9的十个数字分别对应EMHFS的十个传感单元,当手指依次输入数字“9-4-5-8”时,每个数字对应特定的传感单元产生了响应的电信号(图7d)。由于预设密码为9458,在接收到输入信号后,屏幕会显示密码正确的提示,从而实现无接触式操作成功解锁(图7d(i, ii))。值得注意的是,消除了数字为“0”的传感单元以用于无接触屏幕手势解锁。当手指滑动“U”形手势时,对应的传感单元按照滑动轨迹依次产生了不同的信号响应(图7e)。图7f详细描述了无接触屏幕控制系统的工作流程与解锁机制。该系统工作分为信号产生、信号采集、信号处理和显示窗口四个环节:当用户进行无接触密码或手势操作时,EMHFS的传感信号被触发。此时感知设备中的MCU会采集原始信号,经差分放大电路和模数转换器处理后,通过蓝牙无线传输到接收端。终端界面根据处理后的信号验证密码或手势,实现无接触屏幕解锁。这些演示全面展示了EMHFS在无接触屏幕密码与手势解锁中的应用,突出了其无接触、高精度和多模态识别的优势,为医院公共设备的无接触交互提供了可行方案。
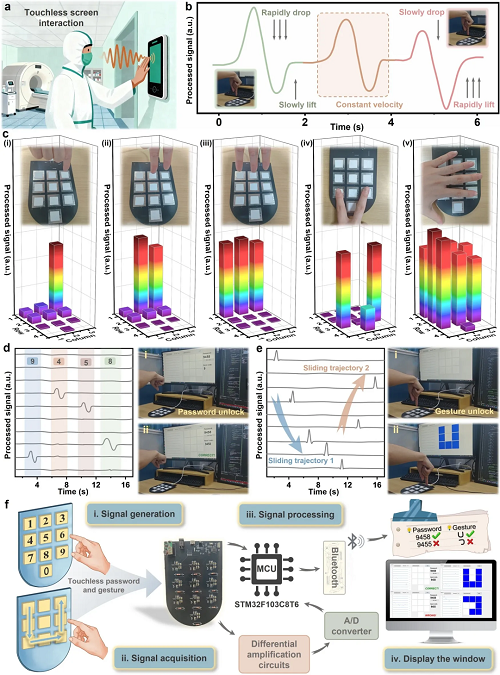
图7. EMHFS在非接触式屏幕上的密码和手势解锁应用演示。a. EMHFS集成到非接触式屏幕的示意图,用于医院公共设备的非接触式操作场景。b. 手指以不同垂直速度抬升和落下时产生的响应信号。c. 当手以不同姿势在EMHFS单元阵列上移动时,3D图中所示每个单元对应的响应信号。d. 使用手指依次输入预设密码“9-4-5-8”时,十个单元的响应信号;附图展示了基于EMHFS的非接触式操作模式下通过密码输入解锁的界面。e. 手指以预设的“U”形手势滑动时,十个单元的响应信号。附图展示了基于EMHFS的非接触式操作模式,显示了通过手势输入解锁的界面。f. 非接触式屏幕控制系统的工作流程和解锁机制图。
VI 总结
本研究展示了一种完全仿生的多功能柔性传感器(EMHFS),其灵感来源于蛋壳的自然层状结构。通过仿生蛋壳的角质层、海绵层-乳头层及内外壳膜,EMHFS实现了四层结构的功能集成。类角质层的摩擦电层由静电纺丝技术制备的PVDF/MXene/BaTiO₃纳米纤维组成,基于摩擦电效应和静电感应原理实现了出色的非接触传感性能(最大检测距离达2米)。类海绵层和乳头层的PDMS/CNTs压阻层由模版法制备,实现了高灵敏度(28.72%)和宽压力检测限(105 kPa),同时具备快速响应/恢复时间(57 ms/42 ms)和优异耐久性(13000 次加载 - 卸载循环后性能稳定)。类内外壳膜的PAN/TPU纳米纤维亲水-疏水双层膜表现出良好的定向吸湿、透气性和抗菌性(对大肠杆菌和金黄色葡萄球菌的抑制率分别为92.9%和91.2%)。完全仿生的设计最大限度地利用了各层的互补优势,能够在不同传感模式之间无缝切换。这种新颖的设计实现了多样化的HCI应用:包括通过应变传感阵列实现机器人手的实时手势控制、设计可穿戴无人机控制系统实现无人机的三自由度(3-DoF)的稳定控制和开发非接触式屏幕以提供无接触解锁密码和手势的功能,同时还在呼吸和脉搏等微弱的生理信号监测方面展现出显著优势(高湿环境下仍可精准监测)。总的来说,这种创新的仿生方法克服了传统传感器只有一种操作模式的局限性,为下一代可穿戴电子设备、智能结构和多模式人机交互系统开辟了新的可能性。
作者简介

贺炜威
本文第一作者
中国石油大学(华东) 博士研究生
▍主要研究领域
(1)柔性传感器;(2)集成电路;(3)可穿戴电子。

张彦振
本文通讯作者
中国石油大学(华东) 教授
▍主要研究领域
(1)柔性电子;(2)喷墨打印;(3)金属增材制造。
▍主要研究成果
在中国石油大学(华东)获博士学位,后分别作为洪堡学者、DECRA研究员任职于德国奥尔登堡大学和澳大利亚斯文本科技大学。2020年加入中国石油大学(华东)至今。主要研究领域为柔性电子、智能传感、喷墨打印、金属增材制造等。共发表SCI论文130余篇,其中以第一作者或通讯作者在 Nat.Commun.、Phys. Rev. X、Nano-Micro Lett.等国际著名刊物上发表论文60余篇,被国内外学者他引3000余次。出版英文专著3部。申请授权发明专利32项,待授权12项。先后主持德国洪堡基金项目、德国DFG科学基金项目(相当于我国面上项目)、澳大利亚DECRA 项目(相当于我国优青项目)、国家海外高层次青年人才项目、国家自然科学基金面上项目、山东省“泰山学者”青年专家项目、山东省优秀青年科学基金项目(海外)等国家级和省部级科研课题8项。先后入选德国“洪堡学者”、澳大利亚 “DECRA 研究员”、中国海外高层次青年人才、山东省“泰山学者”青年专家和山东省优青。
▍Email:zhangyanzhen@upc.edu.cn

张冬至
本文通讯作者
中国石油大学(华东) 教授
▍主要研究领域
(1)微纳检测与先进传感器;(2)柔性可穿戴电子传感技术;(3) 能源设备状态安全监测。
▍主要研究成果
教授,博士生导师,山东省泰山学者,山东省教学名师,全球高被引科学家,全球前0.05%顶尖学者,山东省电工技术学会副理事长,山东省高校青年创新团队带头人。主要从事微纳检测与先进传感技术、安全监测与风险智能感知技术、智能检测技术与微系统、柔性可穿戴电子传感技术等研究。近年来主持国家重点研发计划项目课题、国家自然科学基金项目、山东省重点研发计划项目等科研项目30余项。在国际著名期刊上发表SCI收录论文280余篇,先后入选ESI高被引论文49篇,ESI热点论文13篇,他引2.3万余次,H指数89,授权国家发明专利53项,出版教材/学术专著8部。荣获中国石油和化学工业联合会科技进步一等奖、中国商业联合会科技进步奖一等奖、山东省自然科学奖二等奖、教育部科学研究优秀成果奖二等奖、中国发明协会发明创业奖创新奖二等奖、新疆维吾尔自治区自然科学奖、中国电子学会自然科学奖、日内瓦国际发明展评审团特别嘉许金奖等科技奖励十余项,入选全国石油和化工优秀科技工作者、中国电子学会优秀科技工作者、中国石油和化学工业联合会青年科学技术突出贡献奖、中国石油和化工自动化行业协会青年科技突出贡献奖、中国高校矿业石油与安全工程领域优秀青年科技人才奖等。担任中国仪器仪表学会实验室仪器分会理事、中国自动化学会具身智能委员会委员、中国化工学会化工安全专委会委员、中国自动化学会智能传感器与检测技术专委会委员、中国仪器仪表学会精密机械分会理事、Nano-Micro Letters、Rare Metals期刊青年编委、Smart Sensors创刊主编、智能感知工程期刊编委等,多次担任系列国际学术会议大会主席暨大会邀请报告。
▍Email:dzzhang@upc.edu.cn
撰稿:原文作者
编辑:《纳微快报(英文)》编辑部
关于我们
Nano-Micro Letters《纳微快报(英文)》是上海交通大学主办、在Springer Nature开放获取(open-access)出版的学术期刊,主要报道纳米/微米尺度相关的高水平文章(research article, review, communication, perspective, highlight, etc),包括微纳米材料与结构的合成表征与性能及其在能源、催化、环境、传感、电磁波吸收与屏蔽、生物医学等领域的应用研究。已被SCI、EI、PubMed、SCOPUS等数据库收录,2024 JCR IF=36.3,学科排名Q1区前2%,中国科学院期刊分区1区TOP期刊。多次荣获“中国最具国际影响力学术期刊”、“中国高校杰出科技期刊”、“上海市精品科技期刊”等荣誉,2021年荣获“中国出版政府奖期刊奖提名奖”。欢迎关注和投稿。
Web: https://springer.com/40820
E-mail: editor@nmlett.org
Tel: 021-34207624
转载本文请联系原作者获取授权,同时请注明本文来自纳微快报科学网博客。
链接地址:https://wap.sciencenet.cn/blog-3411509-1524913.html?mobile=1
收藏