
 精选
精选
研究背景
触觉传感器研发面临技术转化、量产稳定性、环境干扰、宽压范围及数据精度与响应速度等多重挑战。随着智能医疗、具身机器人及可穿戴式设备等前沿技术的发展,多功能柔性触觉传感器的现实应用需求越来越大。为此,北京科技大学化学与生物工程学院林祥/华南理工大学材料科学与工程学院武文杰等人以智能触觉传感系统设计制备策略与应用需求间的矛盾为导向,系统总结了智能触觉传感系统的通用传感机制、启发结构、关键性能和优化策略,全面概述了系统集成和算法实现等方面的最新进展,提出了触觉传感器未来发展路线图,着重比较了触觉传感器的未来工业应用及目前各柔性传感器制备策略的优劣性,为柔性触觉传感器的现实应用提供了前瞻性和批判性的思考。
Flexible Tactile Sensing Systems: Challenges in Theoretical Research Transferring to Practical Applications
Zhiyu Yao, Wenjie Wu *, Fengxian Gao, Min Gong, Liang Zhang, Dongrui Wang, Baochun Guo, Liqun Zhang, Xiang Lin*
Nano-Micro Letters (2026)18: 37
https://doi.org/10.1007/s40820-025-01872-4
本文亮点
1. 本文从机理、材料、结构设计、系统集成等多方面介绍了柔性触觉传感器研究的最新进展。
2. 本文为传感器在实践中建立了以性能为导向的合理设计原则。
3. 总结了将柔性触觉传感系统转化为实际应用的挑战和策略,并提出了未来研究的研究路线图。
内容简介
受人体皮肤各种感知能力的启发,将施加的刺激转换为电子信号以感知和量化机械刺激的触觉传感器受到了广泛关注。到目前为止,触觉传感器主要集成了四个基本组件:(i)刺激响应传感元件,(ii)机-电转换元件,(iii)用于噪声抑制和线性化的信号调理电路以及(iv)集成辅助模块(例如,能量收集、无线接口)。随着多功能传感设备的集成,研究者们提出了多维度、快相应的触觉传感系统理念,并相应研究了各种具有触觉传感功能的新型触摸屏和机械臂。然而,仿人类触觉器官的高灵敏度、快速响应时间、宽响应范围和精确感知能力等基本特性是人工触觉传感系统现阶段无法实现的。
近年来,基于纳微材料研究促进了新兴的柔性电子器件取得了重大进展,逐渐取代了传统的刚性传感器,成为触觉传感领域的重要研究方向。实现触觉传感的常用机制包括压阻、压电、电容、摩擦电、光电和磁电感应,这些机制已被广泛研究并获得持续性关注与突破。此外,触觉是一个多维的感觉系统,需要接受与识别各种信息,包括但不限于温度、湿度和接近度等。因此,触觉传感器与各种功能部件的集成也成为研究人员关注的重点,多感官集成系统大大提高了人机交互效率,然而触觉传感过程中的信号耦合反过来大大增加了输出信号的复杂度。一方面,这种进步导致触觉信号变得更加精确和密集。另一方面,这种增强也给触觉信号的处理带来了新的挑战,包括处理速度、信号解耦和信息提取等问题。
在本综述中,北京科技大学林祥&华南理工大学武文杰等从智能柔性传感器的实际应用出发,重点介绍了触觉传感系统的最新发展,将理论研究与实践需求相结合,为下一代智能触觉感知架构建立概念蓝图。同时结合了运行机制的系统分析、仿生结构设计的材料创新、性能评估指标、系统级集成策略和机器学习算法等多个角度,为智能触觉感知技术的未来研究轨迹提供基础认知和前瞻性视角。
图文导读
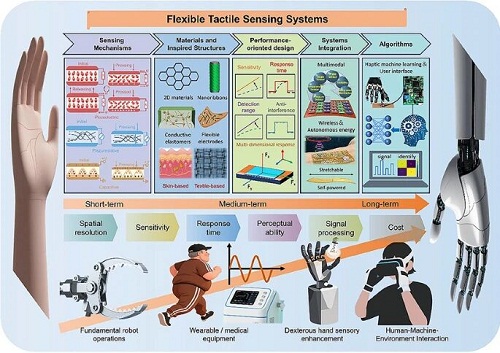
本文重点介绍了触觉传感系统的最新发展,综合前沿研究进展,为下一代智能触觉感知架构建立概念蓝图,并在理解其未来应用方面迈出了一步。图1概述了先进触觉传感系统的开发框架。
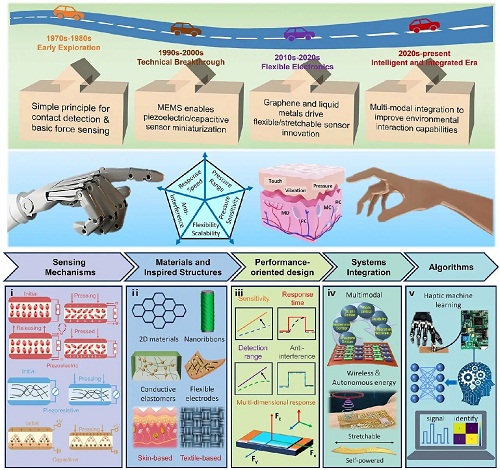
图1. 基于多功能材料与结构设计的皮肤表皮电子器件及其关键性能概览。
I 传感机制
现实世界中物体之间的交互行为取决于物体的重量和刚度、触摸时的表面感觉、接触时的变形以及触摸时力的作用方式。这项研究的最终目的是克服单一机制的性能限制,实现全维触觉感知,并赋予机器仿生触觉智能。为了实现这一目标,人们对传感器的设计、原理和制造进行了广泛的研究:(1)压阻传感器,其特点是成本相对较低。然而,它特别容易受到温度变化的影响;(2)电容传感器具有较高的灵敏度,但遗憾的是,抗干扰能力相对较差;(3)压电传感器,在检测动态力方面表现出出色的性能,但在检测静态力方面往往效果较差;(4)摩擦电传感器,具有灵敏度高、结构简单、自供电、响应速度较快等优点,但受环境因素影响较大; (5)磁电传感器。该类传感器的优点是灵敏度/分辨率高、响应时间快、抗干扰能力强,但缺点也不尽如人意,如成本高、磁场敏感性强、结构复杂;(6)光学传感器,具有较强的抗干扰能力,成本相对较高。
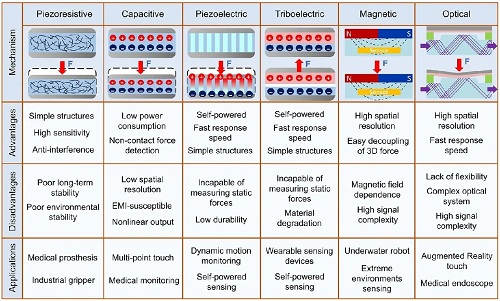
图2. 触觉传感机制总结:涵盖不同传感机制的示意图、相对优势 / 局限性及应用场景。
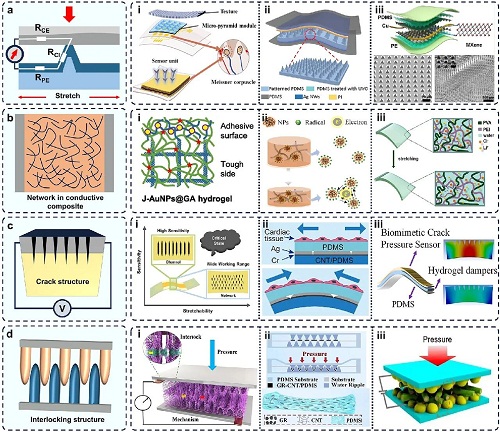
图 3. 基于压阻原理的多种器件结构:a 微金字塔结构压阻器件。b 导电聚合物的内部网络结构。c 裂纹结构。d 多层互锁构器件。
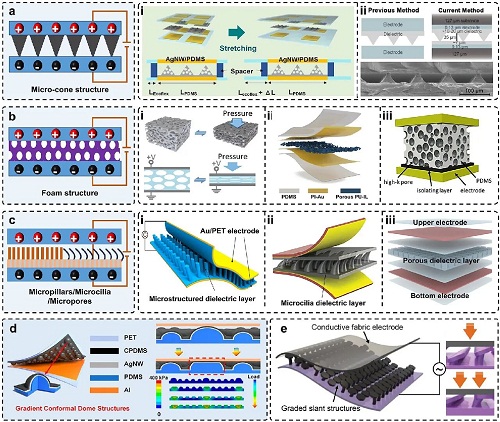
图4. a 微锥 / 微金字塔结构电容传感器。b 泡沫结构电容传感器。c 其他多种结构的电容传感器件,包括微柱 / 微毛 / 微孔结构。d 梯度共形穹顶结构介电层。e 梯度倾斜结构介电层。
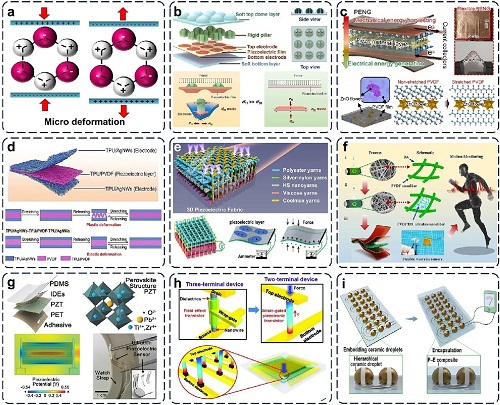
图5. 压电效应的作用机制及基于压电效应的触觉传感器:a 压电原理的微观解释;b 仿手指软硬混合结构压电触觉传感器阵列及其工作模式。c 基于氧化锌纳米花与聚偏氟乙烯(PVDF)的压电纳米发电机(PENG)。d 核壳结构纤维垫触觉传感器。e 三维压电织物传感器。f 聚偏氟乙烯 / 多巴胺(PVDF/DA)复合纳米纤维压电传感器。g 基于锆钛酸铅(PZT)的可穿戴压电传感器。h 自适应高分辨率触觉成像器件阵列。i 层级液滴状压电陶瓷传感器。
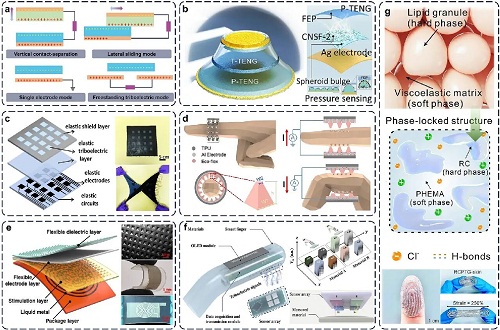
图 6 触觉传感器领域中的摩擦电机制a 摩擦电器件的四种工作模式。b 基于摩擦电纳米发电机传感器的智能软体机器人抓取系统。c 无约束摩擦电电子皮肤(UTE 皮肤)。d 用于连续弯曲传感的 ATH 环(ATH-Ring)。e 触觉 / 非接触式柔性双模智能皮肤(FBSS)的设计与传感机制。f 用于材料识别的摩擦电智能手指。g 用于触觉传感的离子电子型摩擦电凝胶。
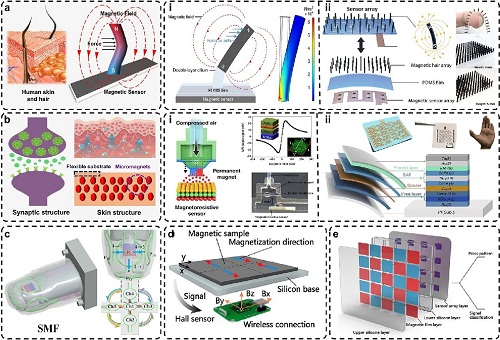
图7. 多种结构的磁性触觉传感器a 类人体皮肤纤毛的磁性纤毛结构:(i)双层柔性磁性纤毛。(ii)磁性纤毛阵列传感器。b 仿突触与皮肤的磁性触觉传感器:(i)触觉尖端磁性突触集成系统。(ii)基于巨磁阻抗(GMI)材料的触觉传感器。c 用于机器人多方向触觉感知的柔性磁电手指。d 由多方向磁化柔性薄膜与非接触式霍尔传感器构成的触觉传感器。e 具有超分辨率与自解耦功能的三明治结构磁电触觉传感器。
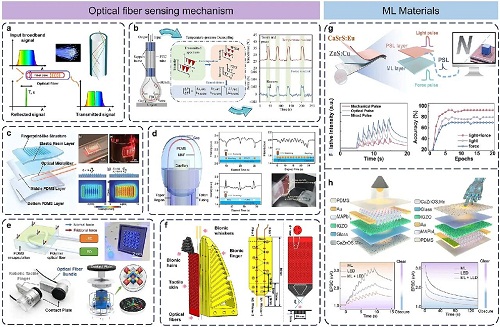
图8. a 光纤材料的触觉传感机制;b 通过将大弯曲光纤布拉格光栅(FBG)封装在弹性体液滴中制成的 SBFT 传感器。c 仿手指皮肤的柔性光学传感器及其工作机制 。d 嵌入微纳光纤(MNF)的紧凑型触觉传感器。e 光纤结(OFN)传感器的构建及机器人触觉手指的爆炸图。f 基于光纤传感器的仿生手指实现抓取操作。g、h 基于机械发光的触觉传感系统。
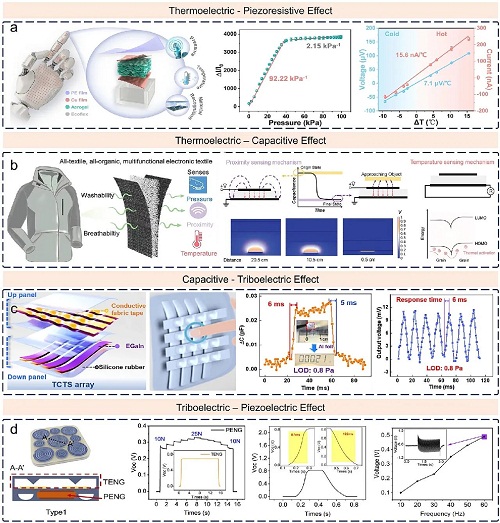
图 9 a 结合热电效应与压阻效应的气凝胶触觉传感器。b 具备热响应及压力 / 接近响应能力的触觉传感器。c 通过多层结构集成电容传感阵列与摩擦电传感器的器件。d 可感知动态与静态刺激的压电-摩擦电协同作用触觉传感器。
II 原始结构构型和启发结构
触觉传感器的原始结构构型是指将触觉刺激转换为可测量电信号的核心过程所必需的最小单元。此配置通常包括三个基本组件:(1)传感元件:直接感知和响应测量变化(包括但不限于压力、温度和湿度)的最重要组件,诱导其固有特性的变化(例如,电阻或电容变化)。(2)转换元件:生成与敏感元件状态变化同步的相应电信号。(3)精简电路:为敏感元件 / 转换元件提供必要的工作条件,并提取原始电信号。例如,适用于电阻式触觉传感器的分压器电路,以及适用于电容式触觉传感器的惠斯通电桥结构。
原始结构构型是柔性电子技术发展的起点,已经被广泛研究和理解。目前,柔性触觉传感器领域的研究重点正在向高性能、多功能、高集成度、仿生组织样特性以及与人体/环境智能交互的结合方向转变。各种仿生结构推动了柔性触觉传感器超越基本性能,实现了类似生物系统的功能。
人体和自然界其他生物独特的生理结构给触觉传感器的结构设计带来了许多启示。人体皮肤中的机械感受器负责区分各种机械刺激,包括对动态力做出反应的快速适应(FA)受体(迈斯纳和帕西尼小体)和可以检测静压的慢适应(SA)受体(默克尔盘和鲁菲尼末端)。此外,一些节肢动物(如蜘蛛和章鱼)以其提供强大感知能力的肢体结构而闻名,而一些植物(如玫瑰和莲花)则以其超疏水表面而闻名。研究人员成功地将仿生学原理与触觉传感器的结构设计相结合,设计开发了许多高性能的柔性触觉传感器。
同时,随着可穿戴设备的快速发展,电子织物触觉传感器受到了广泛关注。纺织品作为人体的“第二层皮肤”,具有柔软贴身的穿着性能,以及灵活多变的结构,是智能穿戴设备中各种电子元器件的良好载体。柔性织物触觉传感器以不同的方式与纺织品作为基材和传感材料或组件集成在一起,以满足各种可穿戴设备的需求。这种类型的传感器不仅满足了传感器的物理和机械性能,还保持了织物的质感和柔韧性,在机器人触觉传感领域展现出了巨大的应用潜力。
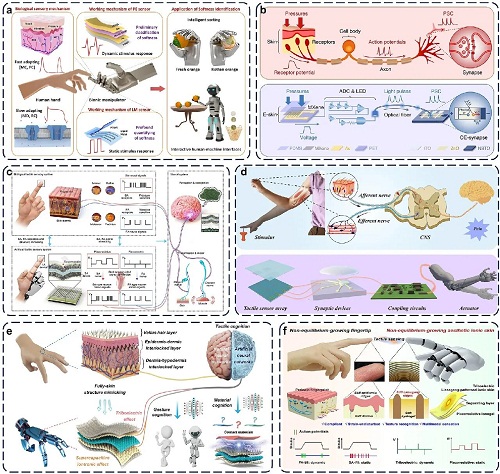
图10. 受人类触觉感知机制启发的触觉传感系统:a 仿生多传感电子皮肤。b 基于 MXene(二维过渡金属碳化物 / 氮化物)与发光二极管(LED)集成的生物传入神经及人工传入神经系统示意图。c 集成压阻效应与压电效应的人工触觉系统。d 模拟生物痛觉感知系统的人工传感系统。e 全皮肤仿生结构电子皮肤。f 人工离子皮肤。
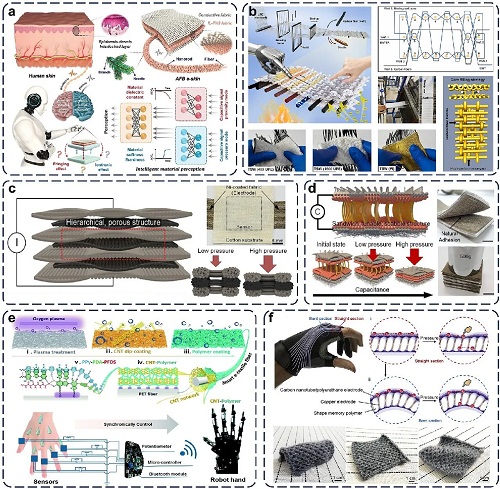
图11. a 受荷叶表面保气特性启发的压力传感器。b 蛛网式柔性触觉传感器。c 星鼻状触觉-嗅觉仿生传感阵列。d 章鱼吸盘结构仿生触觉传感器。e 受树蛙 toe pad(趾垫)结构启发的触觉传感器。
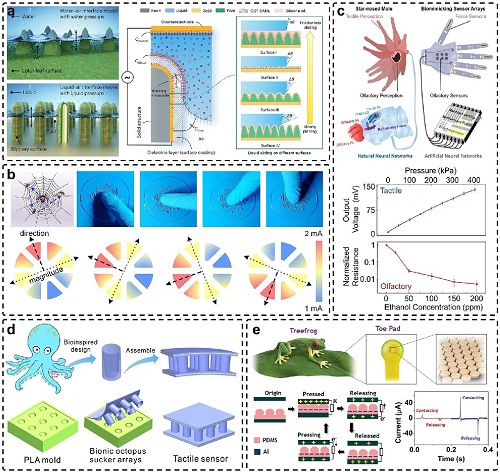
图12. 织物结构触觉传感器:a 基于人工智能(AI)驱动的全织物仿生(AFB)电子皮肤。b 具备自供电触觉传感功能的三层三明治结构机织电子皮肤(TSW 电子皮肤)。c 由多种织物交替堆叠制成的全织物触觉传感器。d 由镀银魔术贴织物与间隔织物构成的三明治结构柔性触觉传感器。e 自适应触觉交互智能手套。f 用于触觉传感织物的芯鞘纤维螺旋展开结构。
III 材料和制造
触觉传感器的传感性能在很大程度上取决于材料的固有特性。由于传统的刚性压力传感器部件无法满足弯曲或拉伸等工况要求,柔性器件越来越受到关注。为了实现力学性能和传感性能的最佳结合,将刚性材料转化为纳米材料或开发新的功能材料成为攻克这一问题的有效方法。在这里,我们总结了触觉传感器常用的功能材料以及常用材料的优点和局限性,其中包括对混合材料系统的讨论。
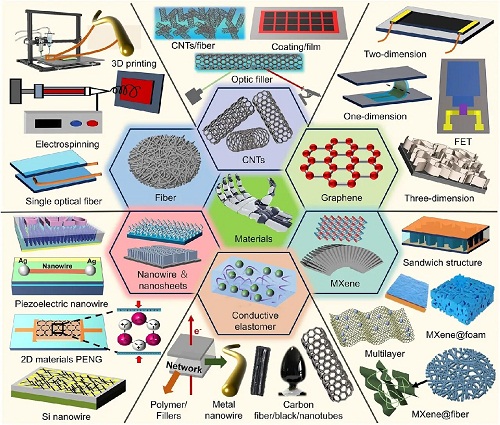
图13. 用于制造触觉传感器的功能材料包括石墨烯、碳纳米管、MXene(二维过渡金属碳化物 / 氮化物)、纤维以及其他纳米材料。
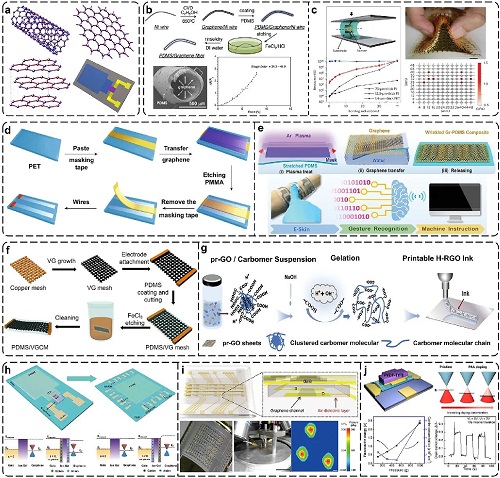
图14. a 不同纳米尺度的石墨烯材料;b 基于涂覆聚二甲基硅氧烷(PDMS)的中空管状石墨烯纤维(TGFs)的应变传感器。c 抗弯曲压力传感器。d 基于石墨烯薄膜 / 聚对苯二甲酸乙二醇酯(PET)的触觉传感器。e 共形褶皱石墨烯传感器及人机交互应用。f 用于应变传感的垂直石墨烯通道网格。g 氢化还原氧化石墨烯(H-RGO)墨水的制备及器件的触觉传感应用。h 石墨烯摩擦电触觉传感器阵列。i 具有空气介电层的压敏石墨烯场效应晶体管(FETs)。j 石墨烯 - 硅肖特基二极管触觉传感器。
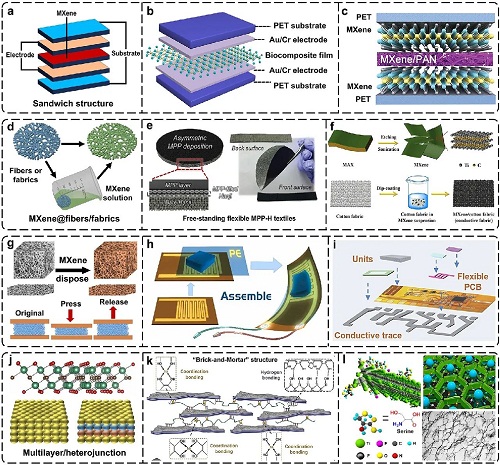
图15. a 以 MXene为功能层的三明治结构器件;b SF/MXene 复合膜柔性压力传感器及传感器阵列示意图。c 基于 MXene / 聚丙烯腈(PAN)的柔性压力传感器制备工艺。d MXene / 纤维复合结构功能层。e MXene / 聚乙烯醇(PVA)/ 聚丙烯酸(PAA)韩纸(MPP-H)多功能智能纺织品。f MXene / 棉织物器件。g MXene / 纤维功能层。h 用作机器人皮肤的水凝胶基多功能传感系统的制备过程。i 水调控超属性凝胶电子皮肤。j 多层 / 异质结器件。k “砖 - 泥” 结构。l 丝氨酸改性 MXene 网络。
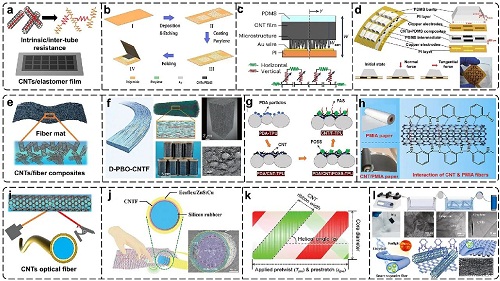
图16. a 基于碳纳米管(CNTs)/ 弹性体薄膜的器件。b 碳纳米管(CNTs)/ 聚二甲基硅氧烷(PDMS)触觉传感器阵列的制备工艺示意图。c 具有随机分布微锥结构的碳纳米管(CNTs)/ 聚二甲基硅氧烷(PDMS)基触觉传感器。d 用于三维力检测的碳纳米管(CNTs)/ 聚二甲基硅氧烷(PDMS)触觉传感器。e 碳纳米管(CNTs)/ 纤维复合材料。f 基于碳纳米管(CNTs)/ 碳布(CC)的柔性压阻式压力传感器。g 超疏水碳纳米管(CNT)/ 氟改性热塑性聚氨酯(F-TPU)纤维毡的制备工艺示意图。h 碳纳米管(CNT)/ 聚间苯二甲酰间苯二胺(PMIA)电热纸的制备过程示意图。i 碳纳米管(CNTs)/ 光纤复合材料。j MLTENGF 的原理示意图及横截面扫描电子显微镜(SEM)图像。k 单纤维双螺旋卡扣式光纤。l 多刺激响应型相变光纤。
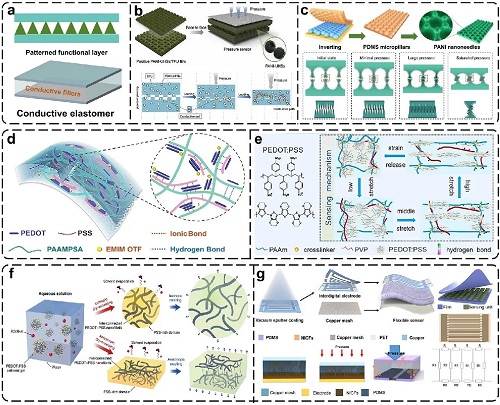
图17. a 导电聚合物触觉传感功能层。b 基于二元尖刺状 / 海胆状纳米颗粒复合薄膜的柔性压阻式传感器。c 修饰有聚苯胺(PANI)纳米针的聚二甲基硅氧烷(PDMS)微柱层级结构。d 聚 (3,4 - 乙烯二氧噻吩)- 聚 (苯乙烯磺酸盐)(PEDOT:PSS)/ 聚 (2 - 丙烯酰胺 - 2 - 甲基丙磺酸)(PAAMPSA)/ 离子液体(IL)复合材料示意图。e SCH 的制备过程及可逆拉伸机制示意图。f 基于纯PEDOT:PSS水凝胶材料的柔性触觉传感器。g MAPS 的制备工艺示意图。
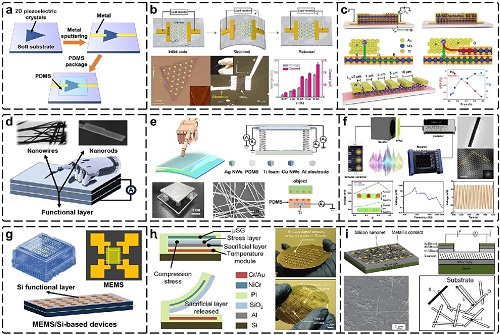
图 18. a 二维材料传感器件的常用制备流程。b 单层二硫化钼(MoS₂)器件的工作机制。c 用于接触电阻测试的二硫化钼场效应晶体管(MoS₂ FETs)示意图。d 基于纳米线和纳米棒材料的传感器件。e 摩擦电器件的结构与工作原理。f 基于铌酸钾钠(KNN)基陶瓷纳米棒的自供能声传感器。g 微机电系统 / 硅基(MEMS/Si-based)器件。h 三维微超级栅极(3D μSG)的形成与集成示意图。i 导电性能随时间下降的渗流型硅纳米线网络。
IV 性能导向的合理设计
由于不同触觉传感模态的性能指标存在不统一性——具体表现为物理指标参数不统一以及量纲不一致,这为制定触觉传感器评估标准的统一带来了严峻挑战。为解决这一问题,本团队对新兴触觉传感技术展开了全面综述,系统地对其工作原理、关键性能指标(KPIs)及结构设计进行了分类,在跨模态基准测试方面,对于量纲定义相同的关键参数,采用最小-最大归一化(min–max scaling) 方法进行标准化处理。这一方法使得性能比较的定量和可视化得以实现。
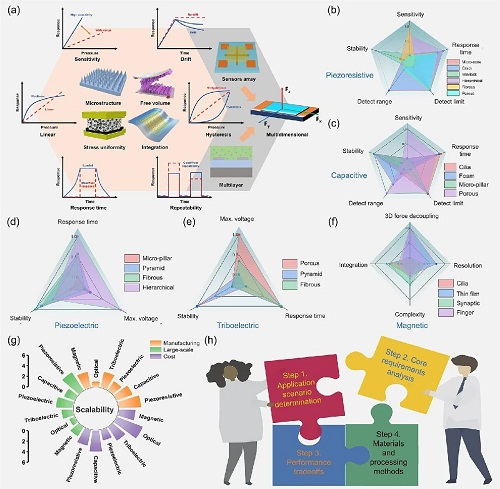
图19. a 触觉传感器的性能评估指标包括灵敏度、线性度、滞后、漂移、响应时间、重复性等方面。b–f 不同机构和结构设计的触觉传感器的主要性能比较。g 不同触觉传感机制在制造、批量生产和成本方面的可扩展性的比较分析。h 合理设计触觉传感器的参考工作流程。
此外,触觉传感系统的设计是一个多维框架的系统性工程,集合了传感机制、材料选择、性能特征和可扩展性等考量。该系统设计过程涉及以下步骤:(1)目标应用场景的定义;(2)确定核心性能要求;(3)通过性能权衡分析确定传感机制;(4)材料和制造方法的选择。这样的设计原则将推动面向应用的触觉传感器设计的合理设计。
V 系统集成策略
新一代触觉传感系统正朝着小型化、集成化、多功能化、智能化方向发展。除了提高单个传感器的性能外,整个系统的集成也构成了一个值得深入研究的重要研究领域。一个全面的触觉传感器系统有望包括与人体相似的多功能传感器、独立可靠的供电系统以及高效的无线通信能力。
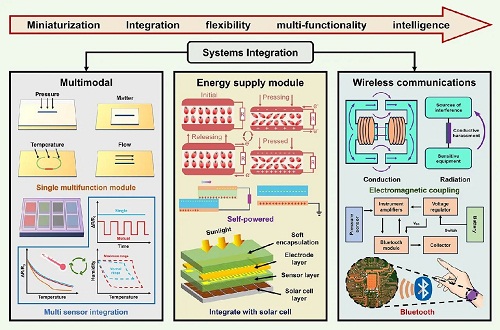
图20. 触觉传感器的系统集成:包括多功能传感模块、能源自主模块和无线通信模块。
此外,高效可靠的系统集成需要解决三个核心挑战:电子接口兼容性、信号处理复杂性和实际部署。在材料结构层面,可以通过涂层、注塑成型或3D打印实现敏感材料与基材的直接集成。或者,光刻或薄膜沉积可实现材料-基板的无缝粘合。对于传感器电路集成,通常采用刚柔结合互连(例如焊接)或多层堆叠。在系统层面,传统的模块化组件通过标准化接口互连。与传统接口相比,无线传输具有卓越的灵活性(消除物理电缆限制)、增强的便利性(简化系统架构)和更广泛的场景适应性(避免脑机接口中有线连接相关的感染风险)。这种协同设计理念共同促进了多样化的实际应用场景。
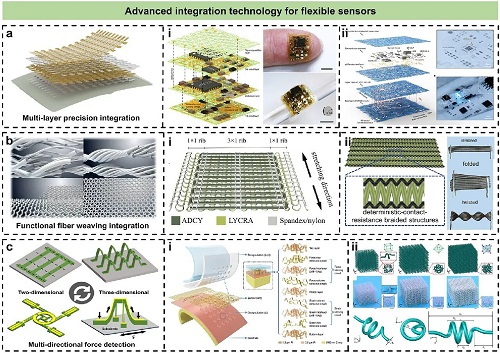
图21. a 多层结构的集成传感:(i) 基于 SMNM 的集成 / 封装策略,(ii) 可渗透三维集成电子皮肤。b 具有纺织结构的集成传感组件:(i) 纺织电阻式应变传感器(TRSS),(ii) 基于 DCRBS 的应变传感器制备流程。c 三维结构的先进集成技术:(i) 三维仿生电子皮肤的集成技术,(ii) 具有不同三维拓扑结构的三维网络材料。
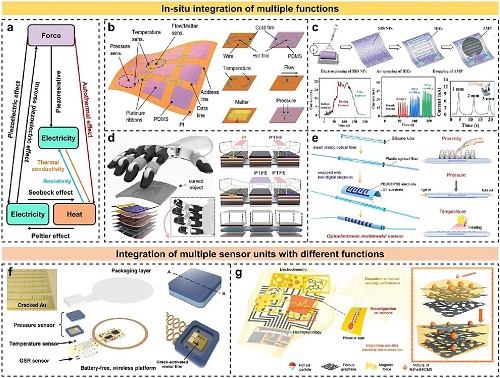
图22. a 触觉传感器的常见传感机制及热阻机制(该机制与压阻传感机制类似);b 具有多功能传感单元交错排列的柔性电子皮肤。c 基于 SAMP 的多模态传感器制备流程 。d 搭载 TMTS 传感器的智能机器人手指。e 柔性光电多模态传感器的结构示意图。f 无电池无线传感平台示意图,该平台包含裂纹触发式压力传感器、温度传感器及皮肤电反应(GSR)传感器。g 基于 HMGN 的可重构柔性电子器件示意图。
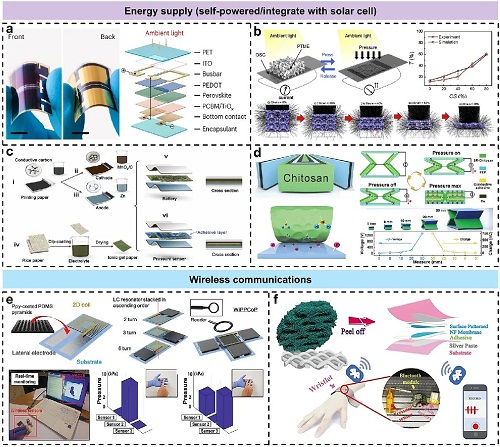
图23. a FPSC 模块结构的三维模型。b 微孔弹性体(PTME)与薄膜有机太阳能电池的集成。c 纸基三明治结构固态锌-二氧化锰(Zn-MnO₂)电池式触觉传感器。d 由折纸结构生物质材料制成的摩擦电触觉传感器。e 基于电磁耦合的无线压力传感平台。f 集成触觉传感器的蓝牙无线传感模块。
VI 智能算法
触觉传感器在小型化、多功能传感和可扩展性方面不断发展。鉴于多功能传感器通常与多个信号的耦合相关,它们不仅带来了更精确的传感信息,而且还带来了运行速度、信号解耦和信息提取方面的挑战。机器学习工具具有高精度、鲁棒性强、计算速度快等优点,已成为一种广受欢迎的信号处理技术
机器学习任务可分为四种主要类型:分类、回归、聚类和降维。在分类和回归任务的背景下,数据被标记,算法以预测能力发挥作用,从而属于监督学习的范畴。 分类任务涉及离散标签,而回归任务则侧重于处理连续标签。此类任务的说明性示例包括与物体表面特性和物体表面荷载的空间分布相关的任务。相比之下,对于聚类和降维任务,数据仍然是未标记的,需要通过探索来挖掘底层模式。因此,这些任务被归入无监督学习的范畴。除了监督学习和无监督学习之外,强化学习是另一种典型的机器学习算法类型。强化学习通常应用于智能机器人纵领域,以做出有关机器人动作的决策。常用的机器学习算法及其应用场景如图所示。
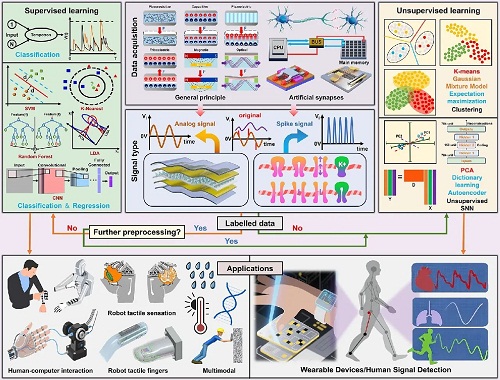
图24. 触觉传感系统设计中机器学习任务、算法和应用场景总结。
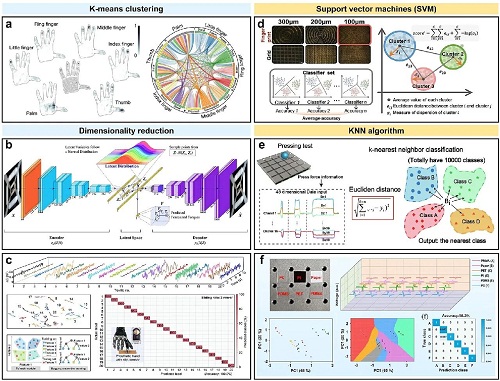
图25. a 采用 k 均值聚类算法进行数据聚类。b 采用自编码器进行降维。c 采用 t-SNE 算法进行降维。d 采用支持向量机(SVM)检测力、触摸位置及手势。e 采用 K 近邻(KNN)算法进行识别。f 基于长短期记忆网络(LSTM)的接触力估算方法。
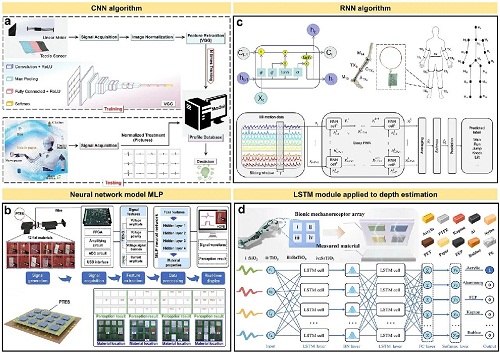
图26. 多种模型在触觉传感中的应用包括:a 卷积神经网络(CNN)模型。b 循环神经网络(RNN)模型。c 多层感知机(MLP)模型,以及 d 长短期记忆网络(LSTM)模型。
VII 多维度的挑战与策略
先进触觉传感器系统设计面临着多维度的挑战:弹性体材料的粘弹性和链松弛对传感器的输出线性度、灵敏度和响应时间的显著影响;触觉传感器的灵敏度和检测范围之间的根本矛盾;高密度传感器阵列的制造和集成在于微/纳米尺度的对准精度和材料兼容性的难题:界面模量不匹配;信号串扰;复杂服役环境如电磁辐射、极端高/低温和机械冲击等。
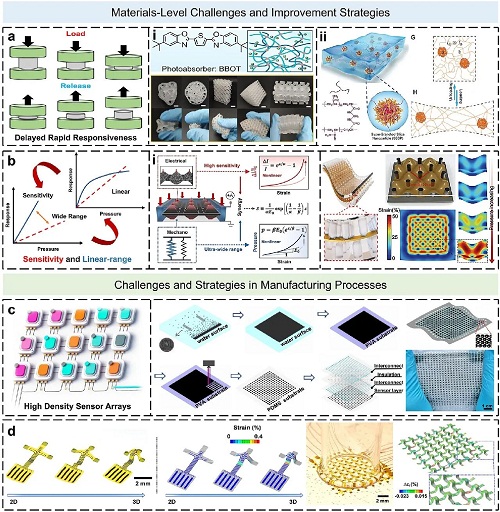
图 27 a 通过利用宏观结构和材料固有的回弹特性来增强材料的滞后行为,具体包括:(i) 具有微晶格结构的弹性体,(ii) 经纳米颗粒增强的无滞后水凝胶。b 可调节的结构刚度:(i) 围绕传感层的刚度调节器(SR),(ii) 刚度梯度传感层设计。c 用于制造高密度、均匀阵列结构的激光烧蚀工艺。d 三维笼状传感阵列。
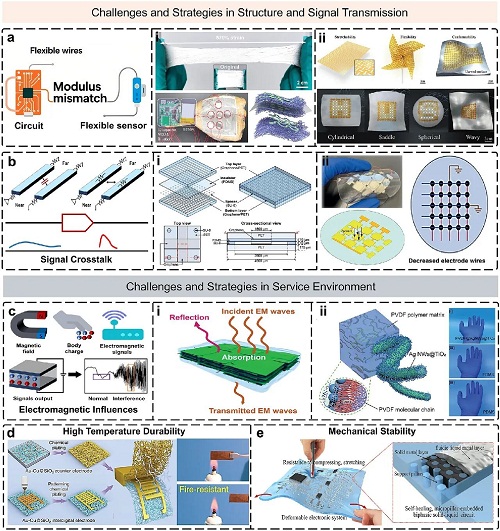
图28. a 传感器界面的模量失配问题:(i) 基于纳米液态金属的高稳定性可拉伸电极,(ii) 仿蛇皮柔性铰链剪纸超材料。b 信号串扰问题的解决方案:(i) 石墨烯电极相对放置且由两组间隔物分隔的电容式触觉传感器,(ii) 简化布线设计及抗串扰绝缘层设计。c 电磁屏蔽材料:(i) 改性石墨烯纳米片 / 纤维素纳米纤维材料,(ii) 核壳结构银纳米线 @二氧化钛(AgNWs@TiO₂)薄膜材料。d 柔性耐高温陶瓷电极。e 抗冲击固 - 液自修复电路设计。
VIII 结论与展望
为了进一步实现从设备制造到机器人触觉感知的高效发展,作者团队认为应该从以下主题进行更深入的研究:
(1)传感器固有性能
传感器的固有感知性能仍需进一步提升,这主要包括以下几个方面:首先,需研发先进的封装技术,以避免传感器在长期运行过程中受损;其次,可通过分子工程、超分子组装等策略增强传感器的拉伸性能;再次,通过多材料复合的方式,可实现器件多尺度上的材料-结构-性能一体化的策略优化,将目前传统的2D“标量”传感发展成3D 的“矢量”传感;最后,具有新型传感机制的新材料研发工作也很有必要。
(2)结合算法的新型设计理念
传统上,触觉传感系统的设计通常以传感器的结构和性能为核心。然而,当引入AI智能工具提供辅助时,机器学习本可发挥的最优性能无疑会受到影响。实践证明,研发机器学习算法以指导传感器设计,是解决这一问题的有效方案。具体而言,需先结合信号处理过程中的算法选择与设计需求,明确期望达成的性能目标;该目标性能可作为一种迭代结构,为传感器设计提供有效指导,进而实现传感系统高效、精简的设计流程。
(3)先进集成策略
目前,触觉传感器器件的集成策略已得到广泛研究,涵盖 3D 层压技术、残余应力诱导组装、界面分层诱导组装、毛细管力诱导组装等多种方式。但遗憾的是,采用这些策略制备的器件结构往往较为单一,难以制造出具有复杂 3D 架构的微电子器件。随着多种 “从 2D 向 3D 演进” 的机械牵引式 3D 结构设计策略被提出,三维空间内的功能实现已成为未来触觉传感器结构领域的重点研究方向。此外,先进 3D 电子器件加工技术的研发也值得进一步探索。
(4)传感与驱动一体化
研发集触觉传感信号输入、处理与反馈于一体的智能系统具有重要意义。要实现这一目标,无论是前端传感与集成技术,还是后端数据处理与信号反馈技术,都将面临更高挑战。当前,触觉传感领域的多数机器学习方法源自计算机视觉、自然语言处理等领域的算法,这些算法要么直接用于处理触觉信号,要么将触觉信号转化为算法所需的理想输入形式——这两种做法都会不可避免地导致信息冗余或信息丢失。因此,针对机器人触觉系统专门设计的触觉信号算法,仍需进一步深入研究。
(5)标准化性能评估方法
构建标准化的评估框架,是推动触觉传感器从实验室研究迈向工业应用的关键桥梁。其意义不仅限于技术层面,更能推动该领域从碎片化创新向系统性突破实现质的飞跃。
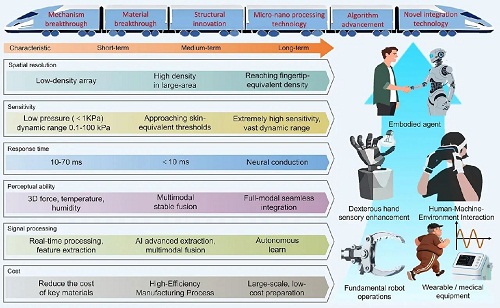
图29. 触觉传感器的前瞻性发展路线图和应用前景。
作者简介

林祥
本文通讯作者
北京科技大学 副教授
▍主要研究领域
高分子材料加工成型、增材制造,高分子复合材料制备及工程。
▍主要研究成果
林祥,副教授。中国塑协专家委员会成员,中英科技桥(Science Bridge China-UK)先进高分子材料实验联合研究中心(AMRI)成员。研究领域包括高分子材料增材制造(3D打印)及高分子复合材料技术加工改性及装备技术,发表学术论文50余篇。主持国家自然科学基金、国家重大基础加强子课题、校企合作课题等多项课题。
▍Email:linxiang@ustb.edu.cn

武文杰
本文通讯作者
华南理工大学 副教授
▍主要研究领域
介电弹性体驱动器、柔性摩擦纳米发电机、智能轮胎及自驱动器件。
▍主要研究成果
武文杰,副教授。长期从事“柔性机电转换新材料及能量转化器件”的研究。以第一作者或通讯作者在Advanced Functional Materials,ACS NANO, Science Bulletin,Nano Energy等期刊发表SCI论文十余篇。主持国家自然科学基金,校企合作课题等多项课题。
▍Email:wuwenjie@scut.edu.cn
撰稿:原文作者
编辑:《纳微快报(英文)》编辑部
关于我们

Nano-Micro Letters《纳微快报(英文)》是上海交通大学主办、在Springer Nature开放获取(open-access)出版的学术期刊,主要报道纳米/微米尺度相关的高水平文章(research article, review, communication, perspective, highlight, etc),包括微纳米材料与结构的合成表征与性能及其在能源、催化、环境、传感、电磁波吸收与屏蔽、生物医学等领域的应用研究。已被SCI、EI、PubMed、SCOPUS等数据库收录,2024 JCR IF=36.3,学科排名Q1区前2%,中国科学院期刊分区1区TOP期刊。多次荣获“中国最具国际影响力学术期刊”、“中国高校杰出科技期刊”、“上海市精品科技期刊”等荣誉,2021年荣获“中国出版政府奖期刊奖提名奖”。欢迎关注和投稿。
Web: https://springer.com/40820
E-mail: editor@nmlett.org
Tel: 021-34207624
转载本文请联系原作者获取授权,同时请注明本文来自纳微快报科学网博客。
链接地址:https://wap.sciencenet.cn/blog-3411509-1505045.html?mobile=1
收藏