
引用本文
张任飞, 董林杰, 王兴松, 田梦倩, 苏浩波. 融合形态特征的基于GRU的介入机器人导丝轨迹预测建模. 自动化学报, 2026, 52(3): 430−440 doi: 10.16383/j.aas.c250506
Zhang Ren-Fei, Dong Lin-Jie, Wang Xing-Song, Tian Meng-Qian, Su Hao-Bo. GRU-based modeling forpredict-ing guidewire trajectories in interventional robotics with morphological feature fusion. Acta Automatica Sinica, 2026, 52(3): 430−440 doi: 10.16383/j.aas.c250506
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c250506
关键词
介入机器人,导丝轨迹预测,门控循环单元,形态特征融合,时序建模
摘要
针对介入导航场景中的导丝轨迹重建问题, 提出一种保持因果性的序列估计方法. 不同于通用循环基线模型, 所提方法将序列级常量特征 (包括导丝刚度、进入角度和有效摩擦描述符) 按时间步广播, 与动态几何量(中心线坐标、直径等)拼接, 经两层特征编码后由单向门控循环单元解码器逐时输出二维坐标. 为处理变长序列, 本文采用时间步长分类的训练策略, 并结合掩码损失函数, 以抑制填充引入的无效梯度, 在不改变网络结构的前提下提升训练与推理效率. 基于覆盖多类导丝与多进入角度的仿体实验平台, 所提方法在保持因果性的同时, 实现0.40 ~ 0.54 mm的位置误差范围(平均误差为0.46 mm); 相较于未采用时间步分类策略的基线模型, 收敛epoch降低42%, 训练时间降低52%, 单次推理时延降低51%. 结果表明, 该方法可为导丝轨迹估计与术中导航提供可部署的算法基础.
文章导读
在血管介入手术过程中, 导丝的引导路径直接关系到术中导航的精度与手术的安全性[1−2]. 即使是经验丰富的术者, 在面对解剖结构复杂、血管走形不规则、视野信息受限的条件下, 仍可能面临操作困难与路径判断偏差[3]. 当前越来越多的研究致力于借助计算辅助技术实现导丝路径的建模与预测, 以提升术中操作的智能化水平, 尤其是在柔性器械广泛应用的介入机器人系统中[4−6], 对导丝行为的感知与预判成为智能引导的重要基础[7−8].
与刚性手术器械不同, 导丝作为一种被动柔性工具, 其在体内的运动轨迹受到本体刚度、摩擦力、血管形态等多种因素的耦合影响, 具有高度非线性与动态性[9]. 在实际手术中, 术者无法实时掌握完整的血管结构信息, 常通过断续造影获取局部二维图像, 仅能观察导丝在局部血管区域内的行为[10]. 在传统介入手术中, 操作人员通过观察影像来确定手术路径, 如图1(a)所示. 介入机器人采用传统治疗中导丝、导管相互配合的前进方式, 导丝提供引导, 细长机器人提供锚点, 如图1(b)所示, 可以更灵活地通过规划好的路径. 图1(c)显示了手术进行时人体内的导丝. 该类系统可称为细长机器人辅助引导系统, 如图1(d)所示.
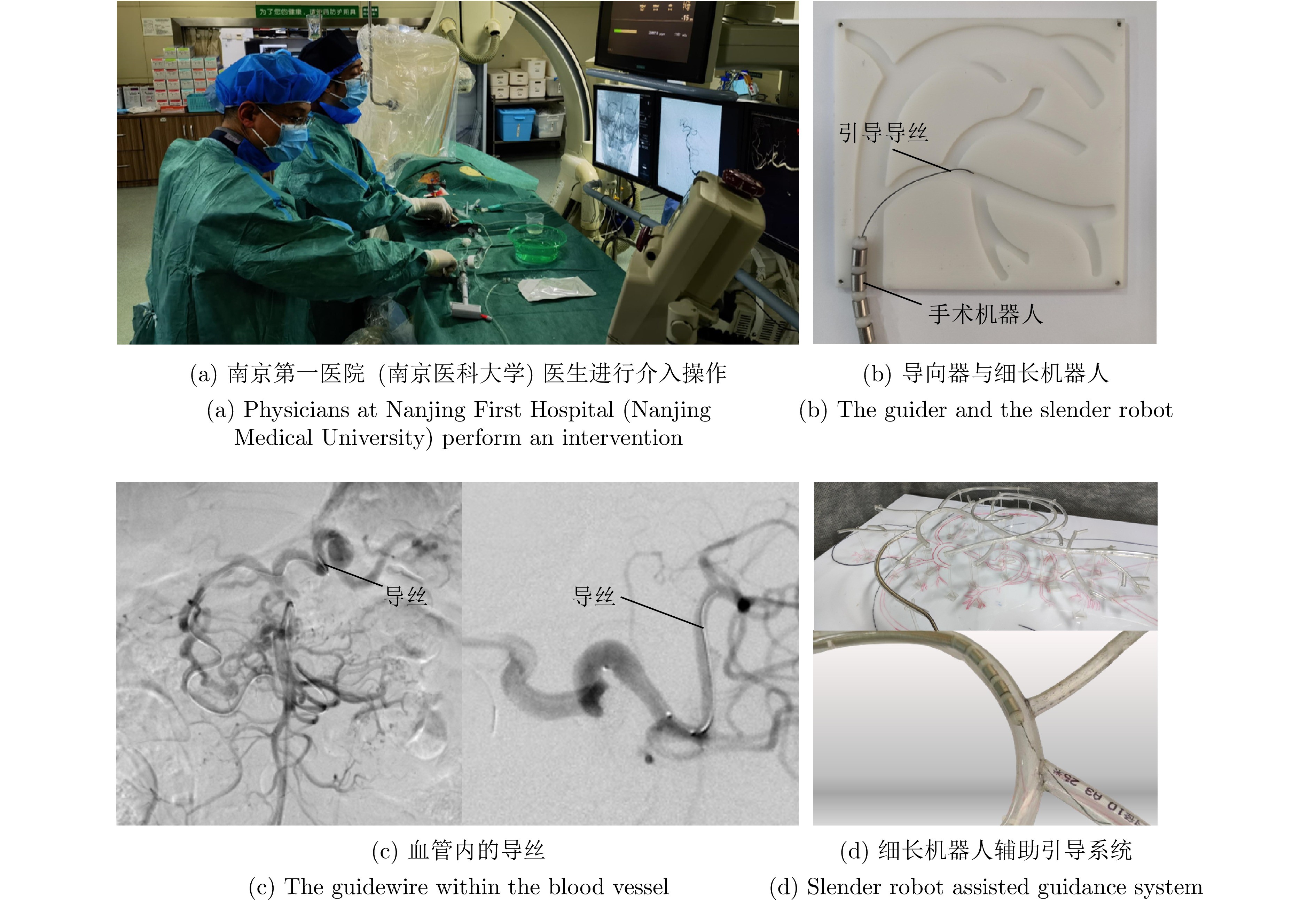
图1 血管内介入与细长机器人辅助引导系统
细长机器人的控制与血管形态测量已有一些研究[11−13]. 目前, 前期工作已研制一种直径为3 mm的细长机器人用于介入手术应用. 因此, 建立一种能够在实时视觉反馈不完整的条件下仍能稳定应对柔性导丝高度非线性行为的形状预测机制, 对于增强介入式机器人在复杂血管结构中导航的能力具有关键意义.
传统方法如有限元建模可对柔性导丝进行力学仿真分析, 但难以满足实时性要求, 且对结构建模与参数设定依赖性强[14]. 在已开展的研究中, 部分工作尝试对导丝头部轨迹进行控制或跟踪, 然而导丝头部轨迹与整体轨迹存在差异, 其预测结果无法准确反映术中实际推进的导丝的完整走形[15]. 近年来, 深度学习在处理复杂非线性时空建模任务中的优势日益显现[16−17], 尤其在序列建模领域, 循环神经网络在处理柔性器械的轨迹推理任务中展现出良好的学习能力与泛化性能[18].
为解决上述问题, 本文提出一种基于多特征融合的GRU (gated recurrent unit)序列预测方法, 用于建模介入机器人系统中导丝引导器的二维整体轨迹. 该方法以导丝物理参数、血管形态特征与环境摩擦因素为输入, 输出不同时间步下导丝整体的连续坐标序列. 考虑到导丝轨迹长度变化较大, 本文设计一种基于时间步长的训练分类策略, 以提升模型在不同序列条件下的稳定性与收敛效率. 此外, 本文构建了完整的用户实验平台, 对模型在实际插入条件下的轨迹一致性与误差分布进行定量与可视化验证, 进一步评估所提方法的部署可行性与泛化能力.
本文的主要贡献如下:
1)提出一种融合形态特征测量的多特征GRU预测模型, 用于介入机器人中引导器的整体轨迹建模任务, 具备可变时间步输入与连续轨迹输出能力.
2)设计时间步分类训练机制, 解决不同序列长度带来的训练不稳定问题.
3)在统一评测协议下, 报告训练开销与在线推理时延, 并以误差的最小值/均值/最大值等统计系统评估精度与稳定性. 结果从实时性与准确性两方面验证模型的实际预测能力与部署价值, 为柔性导丝智能引导与术中导航系统设计提供关键算法支持.
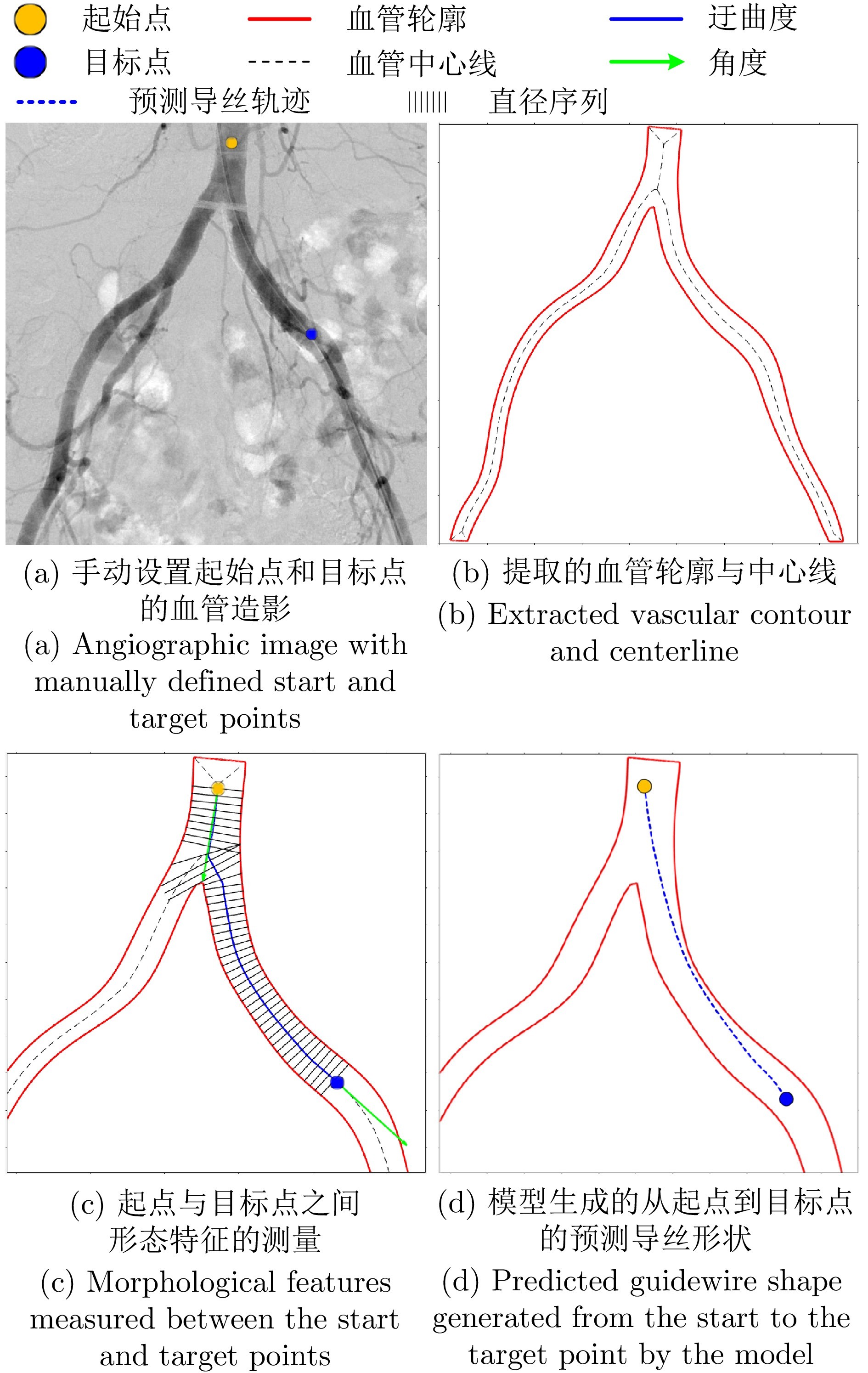
图2 导丝形状预测流程示意图
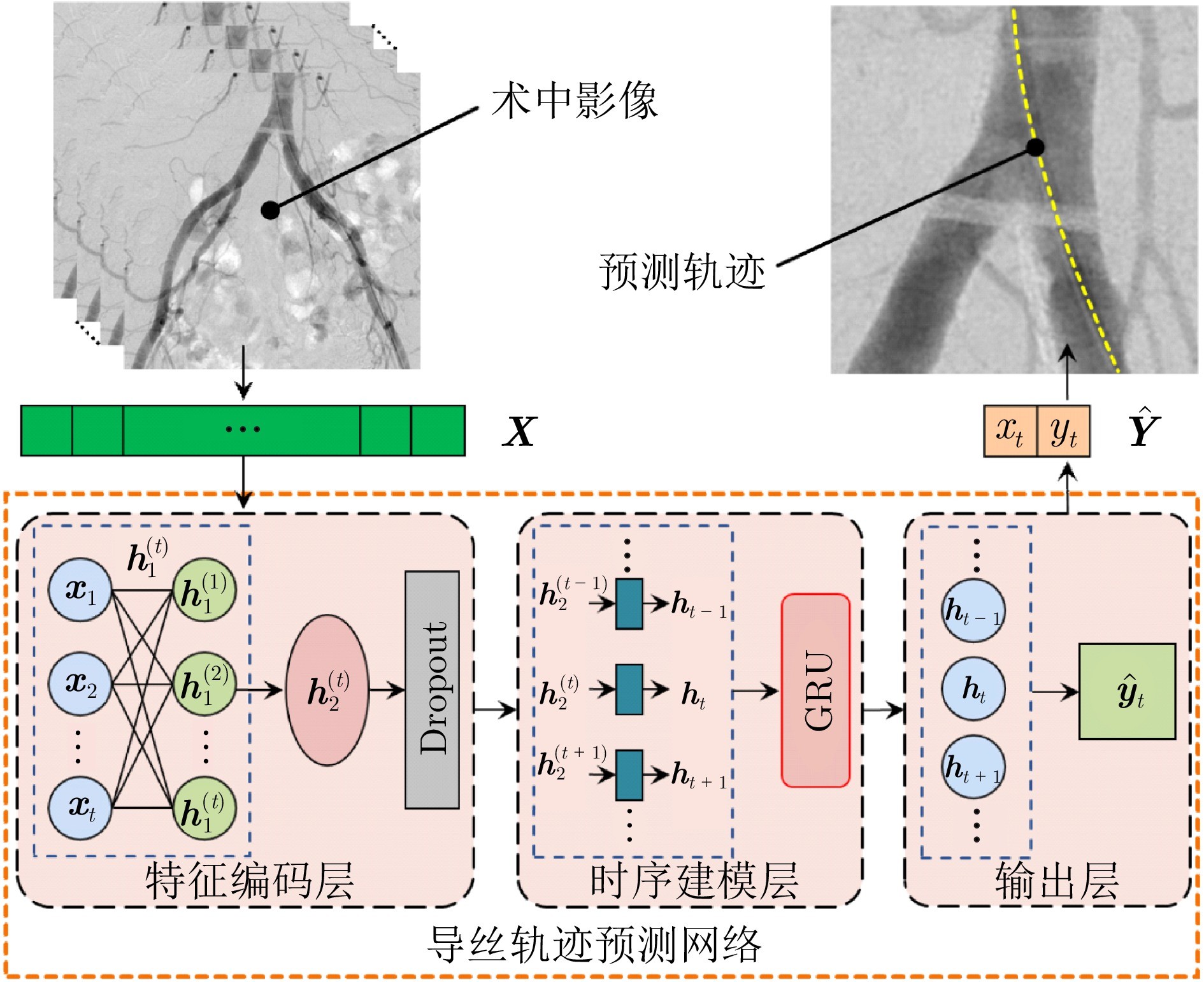
图3 基于GRU的导丝整体轨迹预测模型
本文围绕导丝在术中复杂空间环境下的路径建模问题, 提出一种融合多物理参数的GRU序列预测方法, 实现对导丝在二维空间中的轨迹连续预测. 模型以导丝本体参数、接触特征与环境因素为输入, 输出任意时间步长的坐标序列, 适应手术中导丝形变轨迹的高度动态变化特性. 在模型设计方面, 引入基于时间步长的分类训练策略, 以提升不同序列长度条件下的训练稳定性与收敛速度. 与未采用该策略的基线相比, 采用时间步分类策略可使训练和推理速度提高2倍; 同时设置采样密度为2点/mm, 平衡预测精度与计算效率, 为模型的临床部署提供了参数依据. 在用户实验验证中, 模型在真实导丝插入图像中的预测轨迹与实测轮廓高度一致, 最小平均误差为0.40 mm, 表现出良好的视觉重合度和预测稳定性. 在多组导丝类型与插入角度的组合下, 模型整体误差控制良好, 验证了其在统一实验平台中的可用性与鲁棒性.
本研究为柔性导丝的术中形状建模提供新的解决思路, 并为介入手术机器人导航系统提供了可部署的算法基础. 对于临床迁移问题, 本文输入为介入导航通用的形态量与操作学量, 不依赖仿体的图像外观, 因此从仿体到临床的主要差异体现在血管顺应性与接触条件. 迁移时: 形态量可由临床DSA/CTA (computed tomography angiography)/MRA (magnetic resonance angiography)等提取并作为准静态几何先验输入; 针对临床影像与相机采集在分辨率与成像链路上存在差异的问题, 本文通过尺度标定–重采样–平滑–标准化, 使这类差异以输入噪声的形式被门控时序模型所吸收; 摩擦系数可按所用导丝与临床润湿条件进行一次性标定/范围校核, 并执行与训练阶段一致的标准化与广播拼接; 必要时采用短窗平滑或心动门控以减小形态抖动. 在上述配置下, 本文GRU模型可在不依赖未来帧的前提下进行在线推理, 满足实时部署需求. 临床迁移仅需完成形态量的常规提取与摩擦系数的一次性标定, 网络结构与推理流程保持不变, 具有良好的工程落地性. 同时, 在强顺应性、剧烈搏动或病变导致的显著几何时变场景下, 需进一步引入时变几何通道/域自适应等扩展, 并探索将轻量物理先验(几何可行域约束、接触一致性约束等)融入训练以增强稳健性与可解释性, 该方向已在后续工作中规划.
未来研究将进一步拓展模型至更真实、复杂的预测任务, 结合图像识别与图神经结构增强特征学习能力, 构建端到端的图像引导式形状预测框架. 同时也探索将该模型与智能机器人系统深度融合, 推动其在智能介入手术、术前评估和术中导航等关键任务中的应用.
作者简介
张任飞
东南大学机械工程学院博士研究生. 主要研究方向为介入手术机器人的导航与控制. E-mail: 230218562@seu.edu.cn
董林杰
东南大学机械工程学院博士研究生. 主要研究方向为基于深度学习的图像处理与人工智能. E-mail: 230228047@seu.seu.cn
王兴松
博士, 东南大学机械工程学院教授. 主要研究方向为机器人动力学及其控制, 先进医疗器械. 本文通信作者. E-mail: xswang@seu.edu.cn
田梦倩
博士, 东南大学机械工程学院副教授. 主要研究方向为智能机器人, 控制技术, 机电控制及自动化. E-mail: Tianmq@seu.edu.cn
苏浩波
博士, 南京市第一医院介入血管科副主任医师. 主要研究方向为脑血管疾病及良恶性肿瘤的介入诊疗. E-mail: doctorsuhaobo@163.com
转载本文请联系原作者获取授权,同时请注明本文来自Ouariel科学网博客。
链接地址:https://wap.sciencenet.cn/blog-3291369-1531588.html?mobile=1
收藏