
引用本文
王健安, 闫慧娴, 张君如, 张捷, 李明杰, 赵志诚. 事件触发下多移动机器人抗干扰固定时间预定性能编队. 自动化学报, 2025, 51(7): 1703−1714 doi: 10.16383/j.aas.c230654
Wang Jian-An, Yan Hui-Xian, Zhang Jun-Ru, Zhang Jie, Li Ming-Jie, Zhao Zhi-Cheng. Anti-disturbance fixed-time prescribed performance formation control of multi-mobile robots via event-triggered mechanism. Acta Automatica Sinica, 2025, 51(7): 1703−1714 doi: 10.16383/j.aas.c230654
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c230654
关键词
多移动机器人,编队控制,干扰观测器,预定性能,固定时间,事件触发
摘要
考虑多移动机器人编队系统存在模型参数不确定、未知扰动和有限通信资源问题, 提出一种固定时间预定性能的事件触发编队控制方法. 首先, 设计新的固定时间干扰观测器以精确估计系统的复合扰动. 其次, 基于干扰观测器、预定性能函数、反步法和固定时间理论, 并考虑通信资源受限问题, 设计时变阈值事件触发的固定时间预定性能编队控制器, 使得编队误差在固定时间内收敛且满足预定性能要求. 所提出的触发机制可减少因控制器和执行器频繁通信造成的网络资源浪费, 且无Zeno行为发生. 最后, 通过对三个移动机器人进行编队仿真, 验证了所提方法的有效性.
文章导读
众所周知, 轮式移动机器人具有工作空间不受限、工作环境多样化等优点. 常见的编队控制方法主要有人工势场法[1]、基于行为法[2]、虚拟结构法[3]和领航−跟随者法[4−5]. 领航−跟随者法是将机器人编队问题转化为跟随机器人对领航机器人的期望距离与角度跟踪问题. 这种方法具有控制结构简单、可扩展性好等优势, 因而受到更加广泛的关注.
然而, 移动机器人通常会受到外界干扰、模型参数不确定等影响, 其状态观测问题具有一定的挑战性. 与神经网络[6]或模糊逻辑[7]等不确定性逼近技术相比, 扰动观测器具有计算负担小的优点. 文献[8]设计固定时间扰动观测器处理内外部未知干扰, 但观测器中存在符号函数, 会引起抖振现象. 文献[9]提出一种自适应超螺旋扰动观测器, 将符号函数隐藏在积分项, 有效抑制了抖振现象, 提高了系统精度. 针对复杂环境下的地空协同控制系统, 文献[10]研究一种固定时间扩展状态观测器以估计阵风引起的外部干扰.
另一方面, 目前关于移动机器人编队的研究大都将渐近稳定作为控制目标, 对暂态性能的研究还较少. 利用预定性能[11]思想使多移动机器人能够同时满足暂态性能和稳态性能是一个值得关注的问题. 针对多移动机器人编队问题, 文献[12]设计预定性能编队控制器, 但未考虑系统的动力学模型. 文献[13]研究具有通信范围约束的多移动机器人编队控制问题, 结合预定性能函数设计分布式自适应编队控制器. 针对多移动机器人的非完整约束和不确定非线性动力学问题, 文献[14]提出一种具有预定性能的量化反馈跟踪控制策略. 由于传统的预定性能函数收敛时间不确定, 文献[15]进一步提出一种具有固定时间收敛特性的预定性能函数, 以约束跟踪误差的超调量和精度.
值得注意的是, 由于移动机器人的通信能力有限, 传统的周期性时间触发机制会导致不必要的通信资源消耗. 事件触发机制[16−17]根据触发条件进行判断, 满足触发条件才进行操作, 可节约通信资源. 针对非完整移动机器人的轨迹跟踪问题, 文献[18]充分利用网络化非完整移动机器人的非完整特性, 提出一种事件触发群体控制集成算法, 但未考虑未知扰动和模型参数不确定的影响. 为进一步减少触发次数, 文献[19]提出一种离散系统下的动态事件触发机制, 与静态事件触发机制相比, 避免了迭代控制策略更新时的额外资源浪费. 针对移动机器人在输入延迟情况下的轨迹跟踪问题, 文献[20]设计一种基于反步法的自适应动态事件触发控制策略, 但未考虑预定性能情况. 文献[21]考虑网络攻击或脉冲干扰造成的突然传输, 提出一种根据系统运行阶段动态调整阈值的动态触发方案, 减少传感器输出到观测器之间的冗余传输. 目前, 通信资源受限下多移动机器人的抗干扰固定时间预定性能编队控制仍是一个难题.
受上述讨论的启发, 本文针对多移动机器人编队中的模型参数不确定、未知扰动和有限通信资源等问题, 综合干扰观测器、固定时间控制、预定性能控制及事件触发机制, 提出一种基于固定时间预定性能的事件触发编队控制方法. 主要工作如下:
1)将移动机器人模型参数不确定性和外界扰动作为复合扰动, 设计连续固定时间干扰观测器, 实现对复合扰动的精确估计. 与带符号函数项的观测器相比, 本文观测器避免了抖振现象.
2)为提高编队系统的暂态和稳态性能, 引入一种固定时间收敛的预定性能函数, 对系统误差进行约束, 并结合固定时间观测器和反步法设计领航−跟随编队控制器, 保证系统在固定时间内收敛到原点, 且编队误差在预设的界限内.
3)引入具有单调递减性质的函数代替常参数, 设计一种新的时变阈值事件触发机制. 与相对阈值事件触发机制相比, 减少触发次数, 节约通信资源.
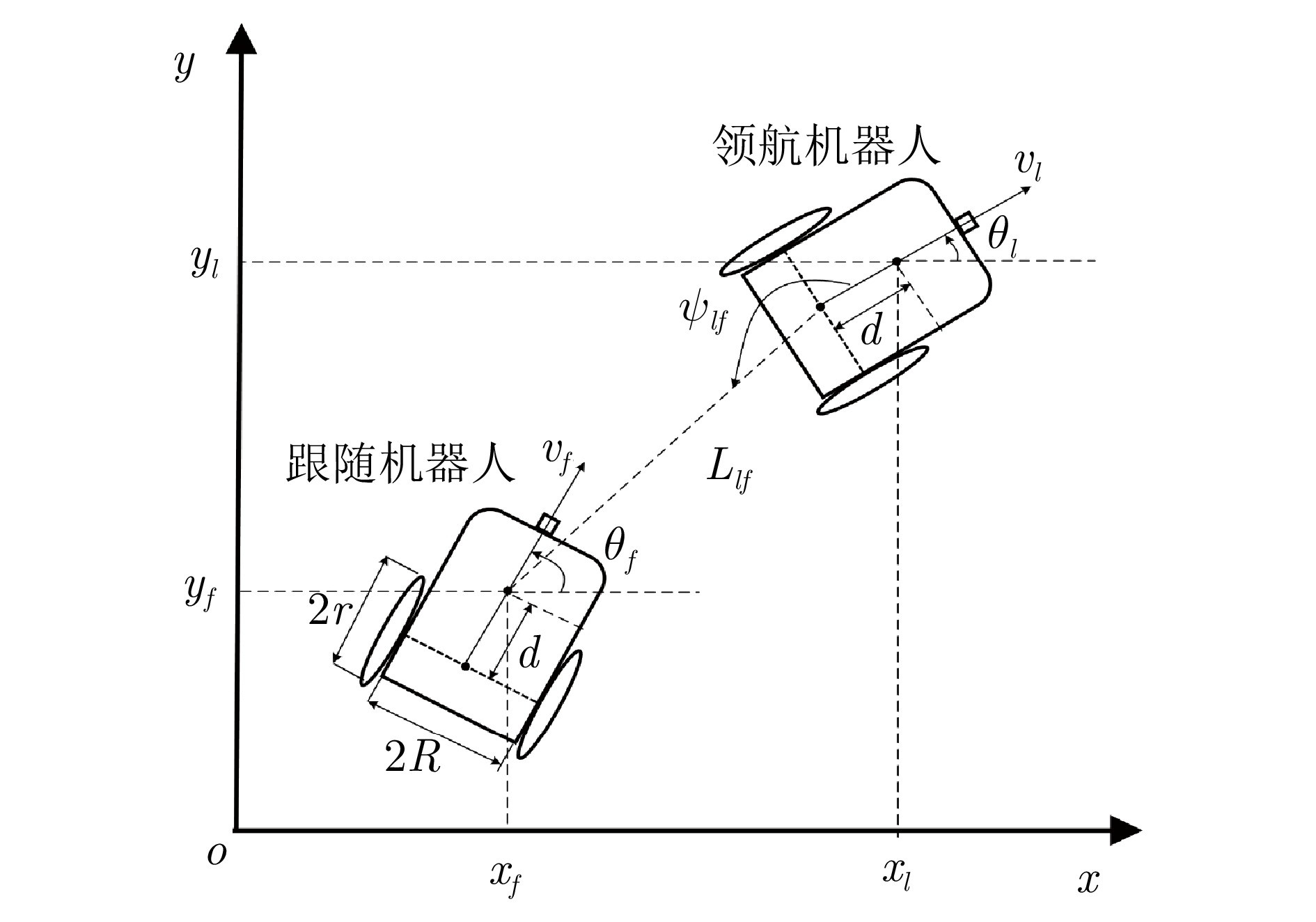
图 1 领航−跟随者编队模型
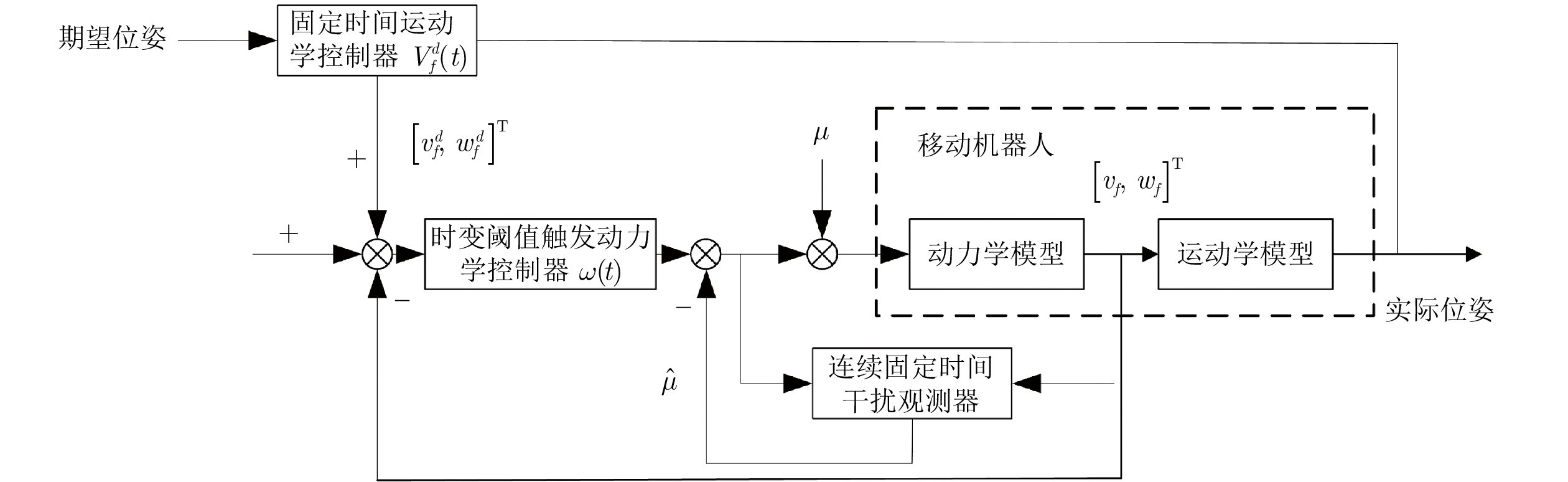
图 2 编队跟踪控制示意图
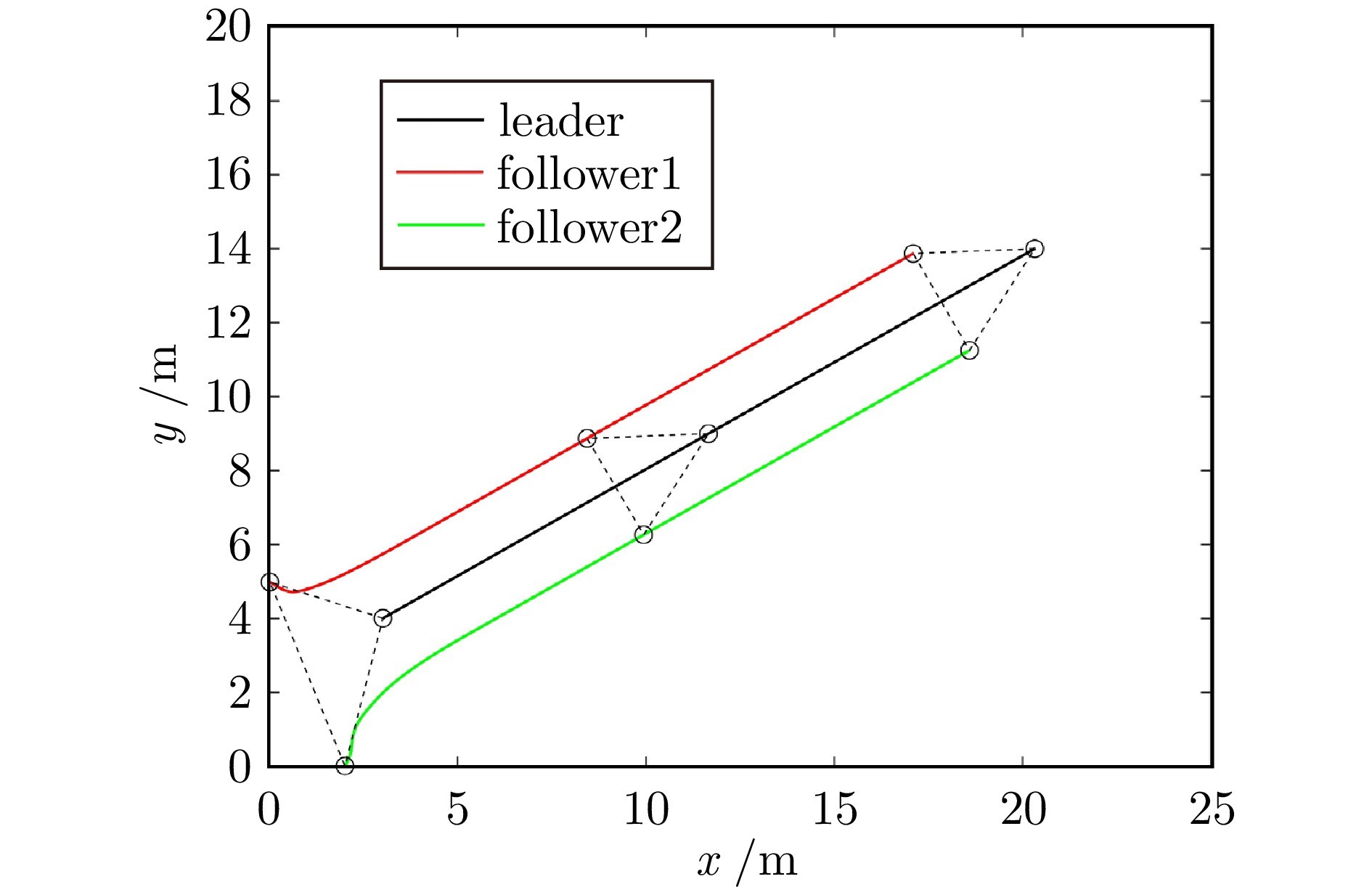
图 3 编队运动轨迹图
本文提出一种抗干扰固定时间预定性能的事件触发编队控制方法, 实现对具有模型不确定性、未知扰动和有限通信资源的多移动机器人编队控制. 设计连续固定时间干扰观测器以实时逼近系统复合扰动. 引入预定性能函数, 设计基于时变事件触发机制的固定时间编队控制器, 使得系统跟踪误差固定时间收敛且满足预定性能. 该方法不仅改善了系统的暂态和稳态性能, 而且减少了通信资源的浪费.
作者简介
王健安
太原科技大学电子信息工程学院教授. 主要研究方向为多智能体系统协同控制和复杂网络. 本文通信作者. E-mail: jiananwang@tyust.edu.cn
闫慧娴
太原科技大学电子信息工程学院硕士研究生. 主要研究方向为移动机器人编队和多智能体系统协同控制. E-mail: yanhuixian@sxgy.edu.cn
张君如
太原科技大学电子信息工程学院硕士研究生. 主要研究方向为复杂网络预设性能同步. E-mail: mzhangjr6@163.com
张捷
太原科技大学电子信息工程学院副教授. 主要研究方向为多智能体系统的协同输出调节和容错控制. E-mail: zhangjie_hao666@163.com
李明杰
太原科技大学电子信息工程学院教授. 主要研究方向为数据驱动的复杂工业过程建模与控制. E-mail: limingjie@tyust.edu.cn
赵志诚
太原科技大学电子信息工程学院教授. 主要研究方向为先进控制理论与应用. E-mail: zhzhich@tyust.edu.cn
转载本文请联系原作者获取授权,同时请注明本文来自Ouariel科学网博客。
链接地址:https://wap.sciencenet.cn/blog-3291369-1500524.html?mobile=1
收藏