
引用本文
纪良浩, 唐少洪, 郭兴, 解燕. 基于全过程隐私保护的多智能体系统平均一致性. 自动化学报, 2025, 51(6): 1359−1370 doi: 10.16383/j.aas.c240471
Ji Liang-Hao, Tang Shao-Hong, Guo Xing, Xie Yan. Average consensus in multi-agent systems based on whole-process privacy protection. Acta Automatica Sinica, 2025, 51(6): 1359−1370 doi: 10.16383/j.aas.c240471
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c240471
关键词
多智能体系统,平均一致性,隐私保护,全过程隐私,联合窃听
摘要
针对通信网络可能遭受多邻居联合窃听的多智能体系统, 研究其基于全过程隐私保护的平均一致性问题, 具体包括保护智能体的初始状态以及智能体在实现平均一致性整个过程中的实时状态. 不同于现有的隐私保护平均一致性算法仅能保护智能体的初始状态且无法抵御联合窃听, 提出基于虚拟子网和非消失扰动的全过程隐私保护平均一致性算法. 在所提算法下, 即使智能体的所有信道都被窃听, 仍然可以实现多智能体系统的平均一致性且智能体的状态可以得到全过程保护. 最后, 通过几个数值仿真实验验证了算法的有效性.
文章导读
近年来, 研究者们对多智能体系统的平均一致性算法进行了广泛而深入的研究[1]. 这一领域因其广泛的应用前景而备受瞩目: 从分布式决策[2]到智能电网[3], 再到信息融合[4]和机器人协同控制[5], 平均一致性算法都起着重要的作用. 然而, 传统的平均一致性算法主要聚焦于实现初始状态的平均值计算, 却往往忽视在实现这一过程中可能存在的隐私泄露问题. 鉴于此, 本文将讨论在一致性问题中引入隐私保护机制的必要性, 并进一步探究基于隐私保护的平均一致性相关问题.
1)保护初始状态. 初始状态作为信息处理和决策的重要来源, 具有重要的保护价值. 在社交网络中, 关于特定话题的意见是集体形成的, 但个人的初始意见不应公开[6]. 同样地, 在交会问题上, 尽管参与者的共同目标是在某一特定地点实现会面, 但个体的初始位置信息可能隐含着家庭住址等敏感信息[7], 因此理应受到保护.
2)保护实时状态. 在保护初始状态的基础上, 保护智能体的实时状态也同样重要. 例如, 在隔离交流微电网领域, 获取有功功率等实时运行参数可能被用于定向网络攻击, 进而引发断电事故与重大经济损失[9]. 然而, 现有多数隐私保护一致性研究聚焦于初始状态保护, 忽视实时状态值的保护.
长期以来, 加密方案一直应用于保护多方通信或信息共享系统中的数据隐私, 如Yao的乱码电路[10]、Shamir的秘密共享[11]、安全多方计算[12]等. 本文聚焦于分布式平均一致性过程中的数据隐私保护问题, 要求智能体在仅通过局部信息交互的条件下, 准确计算整个网络初始状态的均值, 同时确保其初始状态和实时状态不为邻居所知. 现有的方法主要包括: 1)差分隐私方法[13]; 2)同态加密方法[14]; 3)关联扰动方法[15]; 4)虚拟节点方法[16]; 5)网络重构方法[17].
差分隐私最早应用于数据库系统中, 之后被用于解决多智能体系统一致性中的隐私保护问题. 差分隐私的核心思想是在共享信息中添加噪声[13, 18−19]. 平均一致性算法旨在计算初始状态的平均值, 但引入的噪声使得整个系统不能达成准确的平均值. 此外, 该方法在隐私性和一致性结果之间存在一个权衡的问题. 当添加的噪声较大时, 无法保证一致性结果的准确性; 当添加的噪声较小时, 隐私保护效果则不理想.
为使多智能体系统能够实现准确的平均一致性, 研究者们提出同态加密、关联扰动、虚拟节点和网络重构等方法. 文献[14, 20]提出基于同态加密的平均一致性方法. 文献[20]证明当有至少一个可信中心时, 所有智能体的隐私都能得到保护. 文献[14]以去中心化的方式实现同态加密在平均一致性下的应用. 然而, 其要求每个智能体至少连接一个合法邻居, 无法抵御联合好奇邻居的推断. 值得一提的是, 文献[20]存在智能体的初始状态为整数的限制, 而本文智能体的初始状态可以为任意实数, 适用范围更广. 另外, 同态加密方法显著提高智能体的计算和通信开销, 这使得其在计算能力和通信受限的实际应用中受到限制.
为实现不干扰一致性结果的准确性和以轻量的计算方式实现平均一致性, 研究者们提出关联的扰动信号. 大致可分为以下三类: 加性消失扰动、加性零和扰动、乘法扰动. 加性消失扰动[15, 21−23]允许智能体传输真实状态与扰动信号之和, 但这些扰动需要随时间衰减为零. 加性零和扰动[24−25]允许智能体添加任意扰动, 但添加的扰动之和在特定时刻需要归零. 与零和扰动、消失扰动不同, 文献[26]指出, 扰动信号不必消失为零, 而是可以收敛到智能体之间事先约定的值. 例如, 添加的扰动可以衰减为相同的常数. 此外, 文献[27]设计乘法扰动作为保护初始状态的措施, 然而其为确保收敛性, 只通过添加一段时间的乘法扰动而之后则传递智能体的真实状态, 扰动最后同样消失为零. 上述这些扰动方法忽略对智能体实时状态的保护, 实时状态的泄露导致隐私易于泄露. 当智能体的所有邻居相互串通时, 智能体的初始状态和实时状态都无法得到保护.
与关联扰动策略有所不同, 文献[16, 28]提出基于虚拟节点的方法, 该方法具备操作简单和准确性的优势. 然而, 在文献[16, 28]中, 每个子网络具有相同结构的同时, 随着时间的推移, 虚拟节点状态值会逐渐趋近于真实节点状态值. 这一特性意味着, 为保障智能体初始值的隐私, 智能体至少需要保证一条边的输入不被窃听. 另一方面, 文献[17, 29−30]讨论基于网络重构的方法, 以保护智能体初始状态的隐私性. 其基本思想是通过设计网络拓扑, 使特定节点的可观测性最小化. 然而, 该方法存在以下两点不足: 1)在实际应用中, 重构整个网络可能会受到限制, 例如需要重新布线或建立新的连接; 2)重构整个网络较难完成, 例如文献[30]需要集中计算整个网络的左特征向量, 求解高次多项式的根也是一个复杂的问题.
值得注意的是, 上述相关工作主要聚焦于保护智能体的初始状态而忽略对智能体实时状态的保护. 如前文所述, 保护智能体的实时状态同样具有重要价值. 因此文献[31–32]提出全过程隐私保护的平均一致性算法. 在文献[31]中, 通过为每个智能体分配不同的比例系数实现全过程的隐私保护. 此外, 文献[32]将多频正弦信号集成到传递信息中, 用以掩盖智能体的真实状态. 然而, 遗憾的是, 即便采用上述两种方法, 在邻居节点联合窃听的情境下, 智能体的初始状态和实时状态依然难以得到有效保护. 鉴于此, 需要设计能抵御联合窃听并实现全过程隐私保护的平均一致性算法.
基于上述讨论, 本文的研究动机如下: 1)针对上述文献需要至少一条边的输入不被窃听, 即无法抵御联合窃听这一关键问题; 2)大多数隐私保护方法仅考虑对智能体初始状态值的保护而忽略对实时状态值的保护; 3)隐私保护方案应易于实现, 不影响一致性结果的准确性, 并且具有计算简单等优势.
受传统虚拟节点方法[16]构建相同结构虚拟子网的启发, 本文设计一种基于不同结构的虚拟子网和非消失扰动(由每个智能体根据初始条件独立定义)的全过程隐私保护平均一致性算法以解决上述问题. 本文的主要贡献总结如下:
1)针对文献[14−17, 21−32]旨在抵御单邻居窃听而不能抵御邻居节点联合窃听这一问题, 本文提出一种具有更强隐私性的分布式平均一致性算法. 具体地, 该算法通过为每个智能体构建不同结构的虚拟子网络, 并让智能体在传递信息中添加独立定义并且非消失的扰动信号, 实现全过程隐私保护的同时也能抵御联合窃听. 此外, 本文给出独立定义的扰动信号不会干扰一致性结果的充分条件, 解决了邻居节点联合窃听下初始状态和实时状态无法保护的问题.
2)本文在平均一致性问题中引入更全面的隐私保护和隐私性定义, 除保护智能体的初始状态以外, 同时保护智能体的实时状态. 与文献[13]基于差分隐私和文献[30]基于可观测性的隐私性定义不同, 在本文所给出的隐私性定义下, 好奇的智能体根据收集到的信息, 既不能推测其他智能体的初始状态和实时状态, 也不能推测其他智能体的初始状态和实时状态所属的有界集合.
3)与基于同态加密的方法[20]相比, 本文所提出的算法具有易于实施、计算量小等优势以及更好的适用性.
本文的内容结构如下: 第1节介绍本文用到的图论、窃听攻击模型和隐私性定义等相关预备知识;第2节对联合窃听问题进行分类并对算法进行详细说明, 分别对算法的准确性以及隐私性进行分析; 第3节通过四个数值仿真实验验证所提算法的有效性; 第4节对全文进行总结, 指出本文算法的不足并对未来工作提出设想.
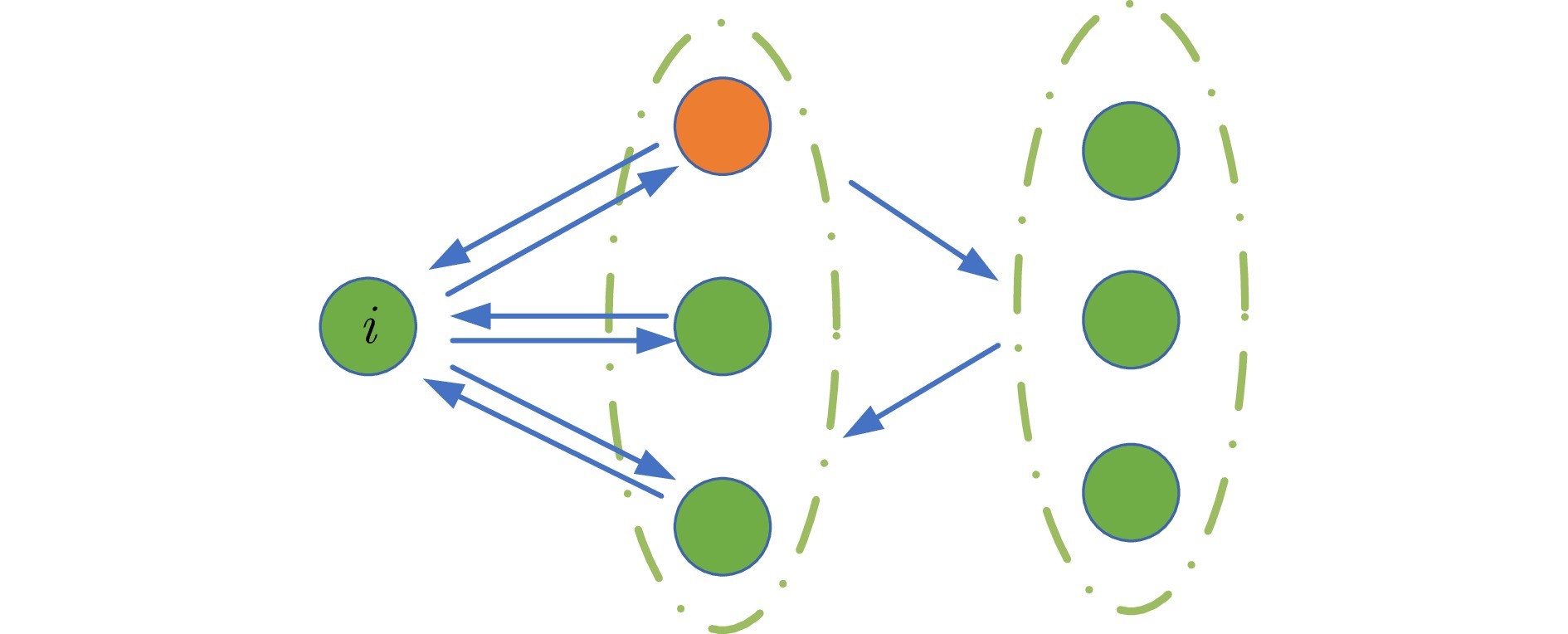
图 1 非联合窃听下的网络示意图
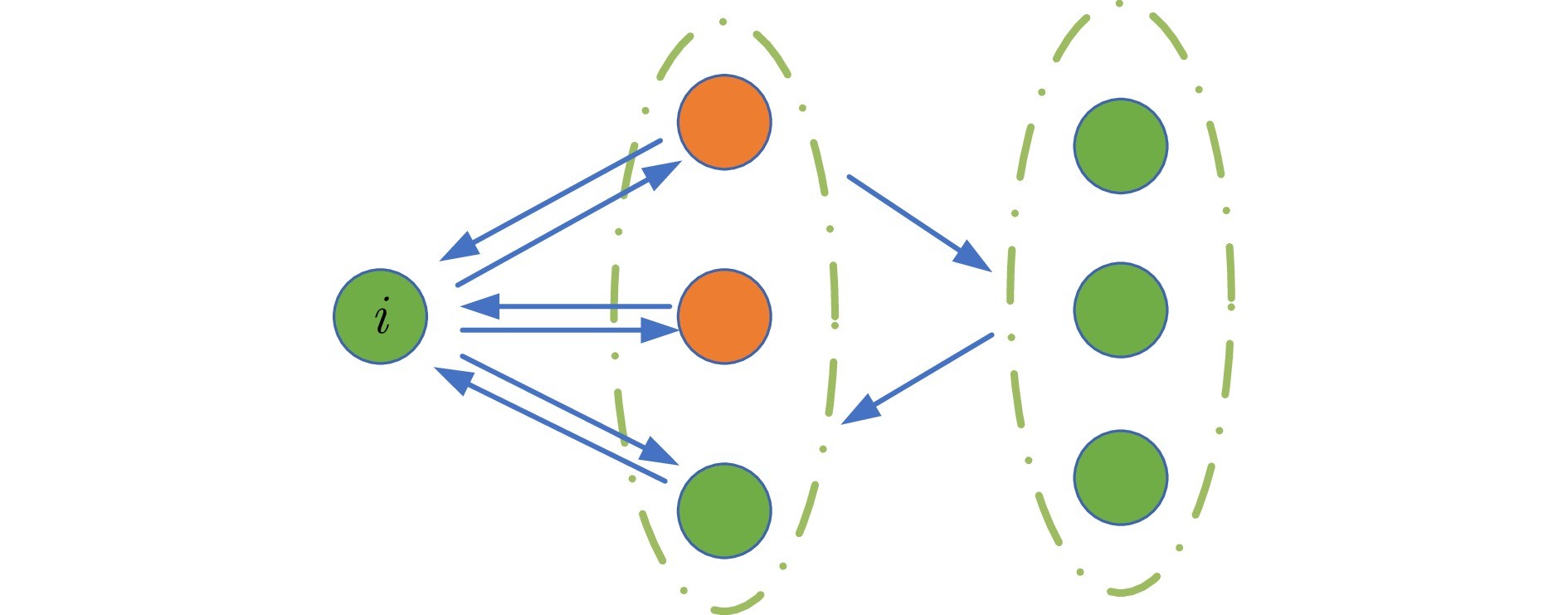
图 2 弱联合窃听下的网络示意图
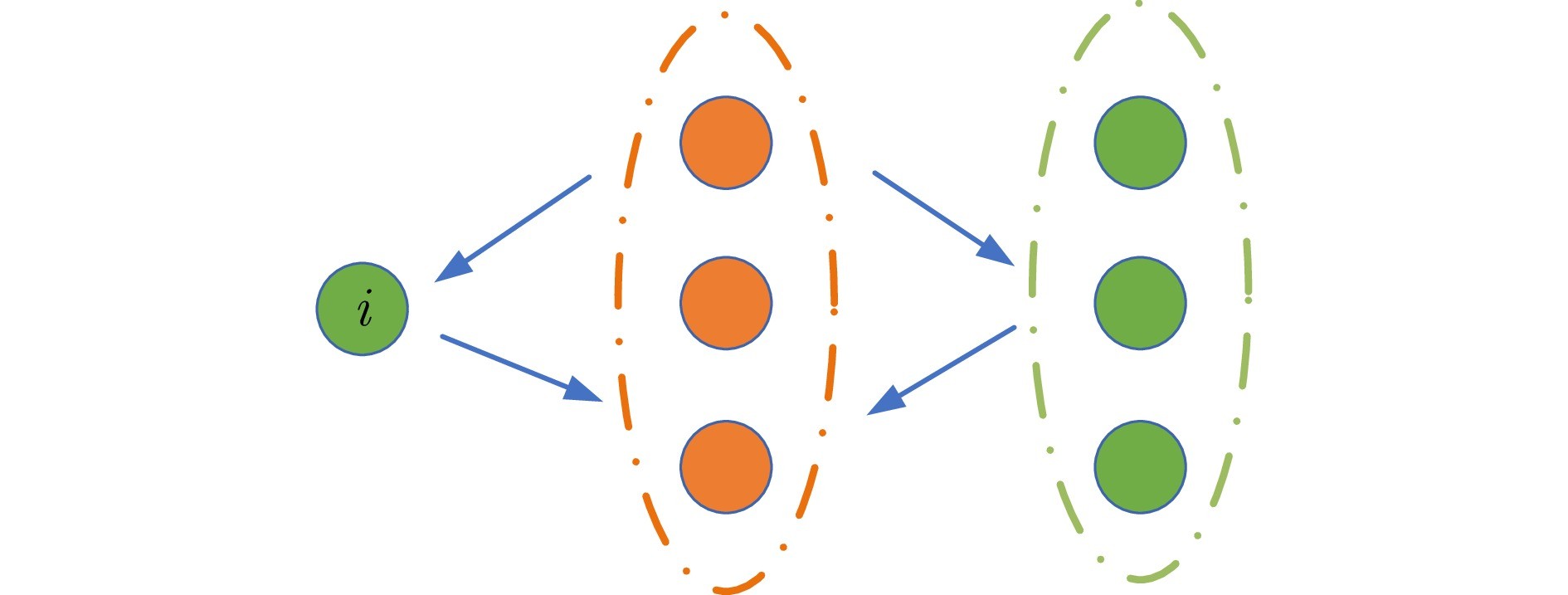
图 3 强联合窃听下的网络示意图
针对联合窃听问题, 本文在强连通权重平衡网络下提出一种能够保护智能体的初始状态和实时状态的分布式平均一致性算法. 首先, 证明了该算法能够确保网络中的所有节点都能获得准确的平均一致性值; 其次, 从信息论的角度证明了只要整个网络中存在一个中立的节点, 则智能体的初始状态值无法被联合的好奇邻居估计. 此外, 即使在完全联合窃听下, 智能体的实时状态仍然可以得到保护. 令$ {{\hat x}_i}(0) $表示好奇节点对节点$ i $初始状态值的估计值. 在基于概率的差分隐私性定义下, 估计值和真实状态值的差位于有界集合$ |{{\hat x}_i}(0)-x_i(0)|<\kappa $中的概率随着$ \kappa $的增大而增加, 其中$ \kappa $为实数. 而在本文所给出的隐私性定义下, 联合的好奇节点既不能估计其他智能体的初始状态和实时状态, 也不能估计其他智能体初始状态和实时状态所属的有界集合, 即$ |{{\hat x}_i}(0)-x_i(0)|<\infty $. 最后, 通过5个节点的简单网络验证了所提算法的有效性.
然而, 本文所提出的平均一致性算法仍存在着不足:
1)为确保每个节点在构建不同的虚拟子网络的同时, 仍然能够实现准确平均一致, 引入虚拟权重比参数$ m_i $, 这一参数依赖于第三方分配. 设计不需要第三方参与并能抵御联合窃听的分布式平均一致性算法将在未来的工作中进一步研究.
2)网络中不仅存在窃听攻击这样的被动网络攻击, 也包含着重放攻击和欺骗攻击这样的主动网络攻击, 将在未来的工作中考虑混合网络攻击下的多智能体系统安全一致性.
作者简介
纪良浩
重庆邮电大学图像认知重庆市重点实验室教授. 2014年获得重庆大学博士学位. 主要研究方向为多智能体系统和智能信息处理. 本文通信作者. E-mail: jilh@cqupt.edu.cn
唐少洪
重庆邮电大学图像认知重庆市重点实验室硕士研究生. 2022年获得沈阳师范大学软件学院学士学位. 主要研究方向为多智能体系统的一致性控制和隐私保护. E-mail: s220201088@stu.cqupt.edu.cn
郭兴
重庆邮电大学图像认知重庆市重点实验室讲师. 2020年获得东南大学博士学位. 主要研究方向为多智能体系统的分布式控制和网络安全控制. E-mail: guoxing@cqupt.edu.cn
解燕
重庆邮电大学图像认知重庆市重点实验室博士研究生. 2022年获得重庆科技大学硕士学位. 主要研究方向为多智能体系统弹性控制. E-mail: d220201014@stu.cqupt.edu.cn
转载本文请联系原作者获取授权,同时请注明本文来自Ouariel科学网博客。
链接地址:https://wap.sciencenet.cn/blog-3291369-1495960.html?mobile=1
收藏