
引用本文
谢国超, 段纳, 万昌晖, 臧航. 基于磁链在线辨识的异步电机超螺旋滑模控制. 自动化学报, 2025, 51(5): 1092−1102 doi: 10.16383/j.aas.c240526
Xie Guo-Chao, Duan Na, Wan Chang-Hui, Zang Hang. Super-twisting sliding mode control for asynchronous motor based on flux online identification. Acta Automatica Sinica, 2025, 51(5): 1092−1102 doi: 10.16383/j.aas.c240526
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c240526
关键词
异步电机,超螺旋滑模算法,可变指数切换函数,电压模型,磁链在线观测器
摘要
研究基于磁链在线辨识的异步电机超螺旋滑模控制问题. 针对异步电机, 设计一种改进的超螺旋滑模速度控制器, 提升系统的动态响应性能. 为抑制算法中符号函数高频切换所引起的系统抖振问题, 构造一种可变指数切换函数. 进一步地, 考虑到转子磁链受惯性延迟的影响, 设计磁链在线观测器, 可辨识转子磁链幅值, 提升系统的控制精度和参数鲁棒性. 数值仿真和实验结果验证了所提算法的可行性和有效性.
文章导读
异步电机具有结构简单、制造容易、价格低廉、运行可靠、维护方便等特点, 广泛应用于电动汽车和工业生产等领域[1−3]. 然而在实际应用时, 异步电机易受到参数摄动和外部负载扰动等不确定因素的影响[4], 且传统的PI调节器[5−6]难以满足控制系统调速及精度需求, 这为异步电机的控制带来一定挑战.
为提升异步电机的控制性能, 国内外研究人员提出多种先进的控制方法, 如滑模控制[7]、内模控制[8]、模糊控制[9]、神经网络控制[10]等. 滑模控制因强鲁棒性和可克服系统参数的不确定性优点, 在实际系统中得到广泛应用[11], 如高速动车[12]、无人机[13−14]等领域. 然而, 由于滑模控制中趋近律的离散性, 系统不可避免地存在抖振问题. 为减小抖振, 常见的解决方法有两种: 1) 对控制律进行改进[15], 实现切换函数的连续化, 但牺牲滑模控制固有的强鲁棒性; 2) 引入高阶滑模算法, 将造成抖振的切换项放入滑模变量的高阶导数中, 借助积分本身的滤波功能, 削弱系统的抖振[16−17]. 目前, 超螺旋滑模算法是应用于异步电机最广泛的高阶算法之一, 文献[18]在扰动观测器中引入超螺旋滑模算法, 估计负载转矩扰动, 提升系统的鲁棒性. 然而, 瞬态响应性能不理想. 文献[19]利用超螺旋滑模算法改进系统逆变器的控制回路, 简化拓扑结构、减小电磁转矩幅度和电流的需求, 但未进行有限时间收敛和实验测试分析. 文献[20−21]采用超螺旋滑模算法, 设计一种超螺旋滑模速度控制器(Super-twisting sliding mode speed controller, STSMC), 减小电磁转矩的波动, 增强系统的抗扰性能. 然而, 在阶跃启动时, 系统存在响应时间较长的问题. 文献[22]将超螺旋滑模算法应用于异步电机的驱动系统中, 在实现抗扰、弱抖和恒频的同时, 提升系统的采样频率. 然而, 文献[20−22] 采用的速度控制器中转子磁链幅值均为常值, 未考虑磁链幅值与d轴电流之间惯性环节所带来的影响, 因此, 设计一种磁链在线观测器辨识转子磁链幅值具有重要意义.
在异步电机矢量控制中, 磁链在线辨识的方法有电压模型和电流模型, 相较于电流模型, 电压模型具有参数强鲁棒性和磁链估计准确性的优点[23]. 然而, 电压模型存在着反电动势与定子电流之间的误差值和定子电阻辨识不准的问题, 容易出现积分漂移现象. 为解决该问题, 文献[24]设计一种改进非线性离散定子磁链估计器取代纯积分器, 减小积分初值和直流偏移. 文献[25]利用低通滤波器取代纯积分环节, 偏移提取器进行磁链幅值补偿, 减弱积分漂移现象. 文献[26]将一种改进的低通滤波器替代传统电压模型的理想积分器环节, 并利用定子感应电动势相位和幅值补偿的方法, 修正系统的积分偏移问题. 文献[27]给出改进的广义二阶积分器替换传统电压模型的纯积分器, 通过调节阈值实现低通和带通的滤波性能, 避免直流偏移和积分初值问题. 然而, 文献[24−27] 采用低通滤波器替代理想积分器的方法, 所预测的磁链信息仍存在一定的相位偏移问题, 从而影响磁链幅值的在线辨识精度.
为提高典型STSMC的动态响应性能、放宽速度控制器中转子磁链幅值为定常值的条件和提升传统电压模型转子磁链幅值的辨识精度, 本文提出一种基于磁链在线辨识的改进超螺旋滑模速度控制器(Improved super-twisting sliding mode speed controller based on flux online identification, IMSTSMC-FOO). 主要贡献如下:
1)设计改进超螺旋滑模速度控制器(Improved super-twisting sliding mode speed controller, IMSTSMC), 提升系统的动态响应性能, 构造一种可变指数切换函数替换符号函数, 消除因符号函数高频切换所导致的系统抖振问题.
2)引入二阶带阻滤波和一阶低通滤波环节, 设计一种磁链在线观测器(Flux online observer, FOO), 实现转子磁链幅值在线辨识, 消除积分偏移, 提升系统的控制精度和参数鲁棒性.
本文的其余部分安排如下: 第1节给出异步电机的数学模型, 第2节给出控制器的具体设计过程, 第3节设计一种磁链在线观测器, 第4节分别给出数值仿真和实验验证, 第5节总结全文并进行展望.
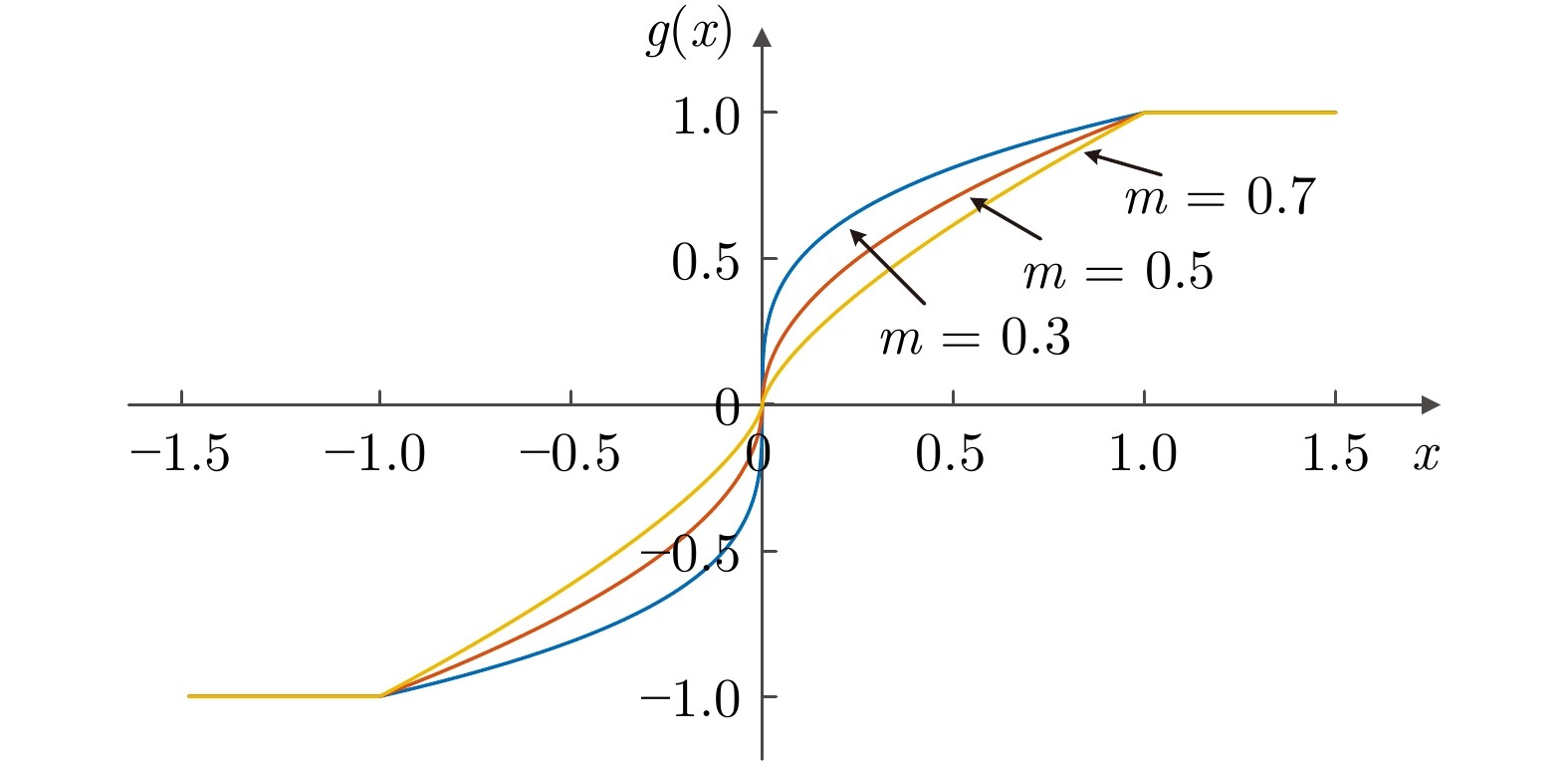
图 2 可变指数切换函数
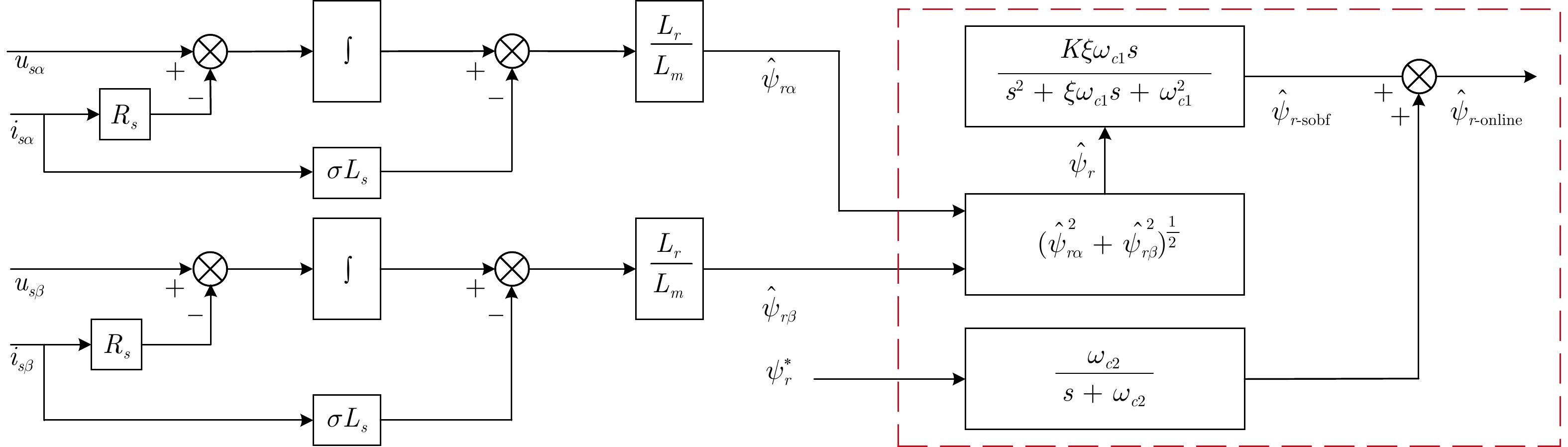
图 3 磁链在线观测器模型
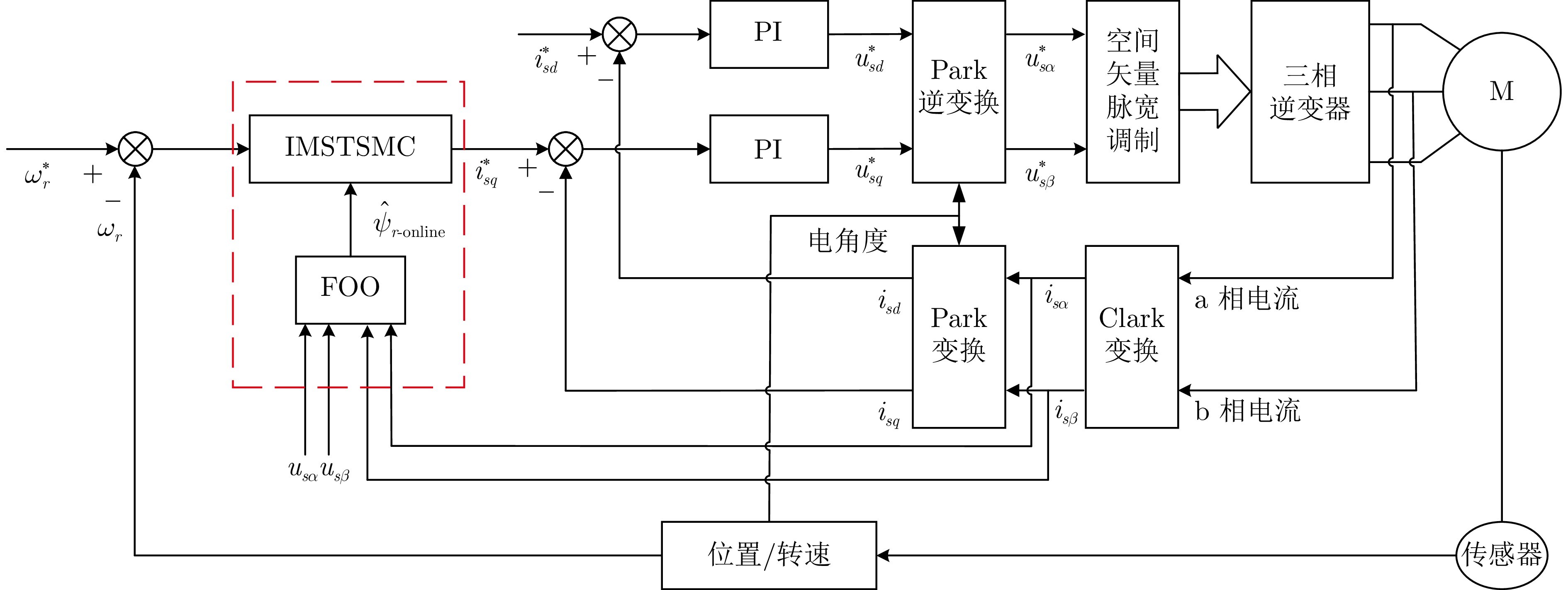
图 4 IMSTSMC-FOO下的异步电机系统框图
本文研究基于磁链在线辨识下的异步电机改进超螺旋滑模调速控制问题. 针对异步电机典型超螺旋滑模速度控制器收敛慢和转速脉动较大的问题, 设计一种改进超螺旋滑模算法和可变指数切换函数. 考虑到转子磁链受惯性延迟的影响, 设计一种磁链在线观测器进行转子磁链在线辨识. 经过仿真和实验测试验证, 本文所提方法提升了系统的收敛速度、控制精度和鲁棒性, 放宽了转矩常数Kt中的ψr为定常值的条件, 解决了积分偏移的问题. 未来将进一步研究低速大转矩运行控制问题.
作者简介
谢国超
江苏师范大学电气工程及自动化学院硕士研究生. 主要研究方向为异步电机无速度传感器控制. E-mail: 2020221748@jsnu.edu.cn
段纳
江苏师范大学电气工程及自动化学院教授. 主要研究方向为非线性系统控制理论及应用. 本文通信作者. E-mail: duanna@jsnu.edu.cn
万昌晖
江苏师范大学电气工程及自动化学院硕士. 主要研究方向为异步电机自抗扰控制. E-mail: 2020211637@jsnu.edu.cn
臧航
无锡信捷电气股份有限公司电机控制算法工程师. 主要研究方向为大功率电机控制. E-mail: zanghang@xinje.cc
转载本文请联系原作者获取授权,同时请注明本文来自Ouariel科学网博客。
链接地址:https://wap.sciencenet.cn/blog-3291369-1491785.html?mobile=1
收藏