
引用本文
袁洋, 段海滨, 魏晨. 无人机/无人艇异构协同固定时间预设性能演化控制. 自动化学报, 2025, 51(5): 1052−1066 doi: 10.16383/j.aas.c240141
Yuan Yang, Duan Hai-Bin, Wei Chen. Heterogeneous cooperative fixed-time prescribed performance evolution control for unmanned aerial/surface vehicle. Acta Automatica Sinica, 2025, 51(5): 1052−1066 doi: 10.16383/j.aas.c240141
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c240141
关键词
异构协同系统,编队包容控制,执行器故障,预设性能演化控制,固定时间稳定
摘要
针对执行器故障的无人机/无人艇异构协同系统编队包容控制问题, 提出一种固定时间预设性能演化控制方法. 为保证基于视觉测量的相对位置信号的连续性和准确性, 设计控制误差收敛的演化路径, 通过固定时间预设性能函数使误差限制在演化路径的邻域内, 并利用转换函数将受约束跟踪问题转换为无约束镇定问题. 采用动态面技术对转换后的误差动力学进行控制, 并利用干扰观测器和自适应技术对干扰和未知执行器故障进行估计. 通过 Lyapunov 函数证明误差动力学闭环系统所有信号都是最终一致有界的, 并进一步证明编队误差是固定时间稳定的, 数值仿真验证了所提方法的有效性.
文章导读
随着无人系统技术的发展, 异构协同平台具有广泛的应用前景[1−4]. 无人机/无人艇(Unmanned aerial/surface vehicle, UAV/USV)异构协同编队联合作业能够结合无人机立体监控和无人艇续航持久的优势, 拓展单机/单艇的能力边界, 满足复杂水域环境中执行巡逻和搜救等高难度任务的能力需求, 具有实际的应用价值和重大的研究意义[5−9]. 无人机和无人艇之间存在异构特性, 在动力结构和信息感知等方面存在较大不同, 同时复杂多变的海洋环境给无人系统带来极大干扰, 无人机/无人艇异构协同系统精准编队任务面临极大的挑战[10−11], 相关学者为此开展大量研究.
在无人机/无人艇异构协同编队控制器设计方面, 文献[12]将无人机和无人艇分别建模为积分器智能体和欧拉−拉格朗日智能体, 设计异构线性时变系统的分布式一致性协议, 并且分析惯性矩阵参数以及无人机和无人艇之间的异质性对控制器性能的影响. 文献[13]针对具有有向拓扑的多无人机和多无人艇异构系统, 提出一种分布式模型预测编队控制方法. 文献[14]针对由一架无人机和多艘无人艇组成的异构多智能体系统编队轨迹跟踪控制问题, 结合自适应技术和径向基神经网络, 设计全局固定时间自适应神经网络非奇异快速终端滑模编队控制协议, 并加入动态事件触发控制策略来减少网络通信的负担. 文献[15] 提出一种基于分布式的最优控制方法, 解决海洋环境下无人机、无人艇和无人潜航器组成的混合阶线性多智能体的编队避障问题. 文献[16]提出基于惯性运动的虚拟轨迹约束方法解决避障时的队形保持问题, 并构建分布式事件触发自适应模型预测控制器对无人机/无人艇异构系统编队问题进行研究. 然而, 当前的无人机/无人艇异构协同编队研究未考虑拒止环境中的定位问题[12−16], 在无法直接获取位置信息的环境中使用受限, 需要在设计协同编队算法时考虑相对定位方法的使用条件. 此外, 上述研究大多只能保证闭环系统的稳定, 对于系统的动态性能和稳态误差并没有限制, 难以保证无人机/无人艇异构系统在复杂多变的海洋环境中高效率和高精度地完成协同编队任务.
为规定控制性能, 文献[17]提出一种基于障碍函数的无人机/无人艇异构编队分层控制方法, 无人机和无人艇分别作为领导者和跟随者, 顶层控制器引导无人机形成可扩展的晶格并跟踪指定路径, 底层控制器驱使无人艇进入无人机形成的凸包, 利用包容控制策略实现无人艇避障. 文献[18]针对无人机/无人车异构多智能体系统, 提出一种基于预设性能控制的分布式自适应容错编队控制方法, 无人机跟踪虚拟领机形成预定编队构型, 无人艇收敛于无人机形成的凸包内. 文献[19]提出一种新的类Lyapunov障碍函数, 适用于通信和测量受干扰的多智能体系统, 保证多任务编队控制的鲁棒性. 文献[20]考虑Filippov解和非光滑分析理论, 利用优化方法来构建控制障碍函数, 并设计动态耦合多智能体系统的协同反馈控制律. 文献[21]利用非对称时变障碍函数, 设计不确定高阶严反馈系统的自适应动态面控制方法, 解决输出不对称约束问题. 文献[22]研究具有执行器故障和干扰的异构多智能体编队问题, 设计有限时间性能函数, 基于滑模控制方法构建分布式固定时间编队控制器. 文献[23] 提出分布式固定时间观测器估计领导者的位置和速度信息, 利用预设性能控制技术对编队误差进行约束, 实现四旋翼无人机的分布式固定时间编队控制. 文献[24]研究具有不可测状态和未知非线性的非严格反馈二阶多智能体系统的时变编队控制问题, 结合神经网络技术, 提出一种有限时间预设性能的自适应输出反馈控制策略, 确保多智能体系统的编队误差在有限时间内收敛到给定范围. 然而, 基于障碍函数的方法和预设性能控制方法需要设计函数对输出进行约束[25−28], 函数的构建受初始误差影响. 为保证闭环系统的稳定性, 一般会选择较保守的初始值, 进而导致输出约束范围过大, 不能保证理想的瞬态性能和稳态性能.
执行器故障也会影响无人系统编队效果. 针对执行器故障, 文献[29]设计连续自适应滑模控制律, 通过自适应机制调节滑模控制增益, 实现执行器故障情况下的多智能体编队问题. 文献[30]将执行器故障和外部干扰作为集总扰动, 设计干扰观测器对集总扰动进行估计, 利用动态面控制技术构建分布式容错控制方案实现无人机编队. 文献[31]设计固定时间观测器估计由参数不确定性、外部扰动和执行器故障组成的集总干扰, 估计误差在固定时间内收敛到原点, 在此基础上利用反步技术和固定时间理论构建无人机/无人车异构系统编队控制器. 然而执行器故障主要为故障偏置和有效性损失, 实际系统中输入饱和导致有效性损失在饱和点处不可导, 采用自适应技术对执行器效率系数进行估计, 将故障偏置与外界干扰作为集总干扰进行观测, 可有效避免上述问题.
受上述研究启发, 本文针对执行器故障的无人机/无人艇异构协同系统编队控制问题进行研究, 结合演化路径理论和预设性能控制方法, 提出一种固定时间预设性能演化控制策略. 本文设计编队误差的演化路径, 并利用固定时间预设性能函数将编队误差约束在演化路径的邻域内, 利用转换函数将输出约束问题转换成无约束误差动力学镇定问题; 设计干扰观测器对干扰进行估计, 并结合自适应技术和动态面控制方法, 设计误差动力学系统的控制器, 使闭环系统信号最终一致有界, 进而保证编队误差在固定时间内收敛到预设区域. 本文的主要创新在于:
1) 通过设计演化路径函数, 为编队误差的收敛速度和收敛时间提供参考, 并且解决预设性能函数设计受误差初始值限制的问题. 预设性能函数的边界位于演化路径的两侧而不是原点的两侧, 减小预设函数的包围区域, 进一步限定控制器的瞬态性能, 保证编队误差在固定时间内沿演化路径收敛到设定区域.
2) 本文结合自适应技术和动态面控制方法, 对具有执行器故障和未知干扰的无人系统误差动力学模型进行控制, 使闭环系统信号最终一致有界, 编队误差状态始终保持在演化路径两侧的预设范围内, 保证本文提出的分布式包容控制策略的固定时间稳定性.
3) 针对无人机/无人艇异构协同系统编队问题, 本文设计基于相对位置的分布式包容控制策略. 在拒止环境中, 本文设计的控制策略利用视觉相对定位, 可以保证在固定时间内领导者无人机形成编队构型, 跟随者无人艇在领导者形成的凸包内.
本文的结构安排如下: 第1节为问题描述和预备知识; 第2节介绍固定时间预设性能演化控制器的设计; 第3节分析控制器的稳定性; 第4节为数值仿真; 第5节给出本文的结论.
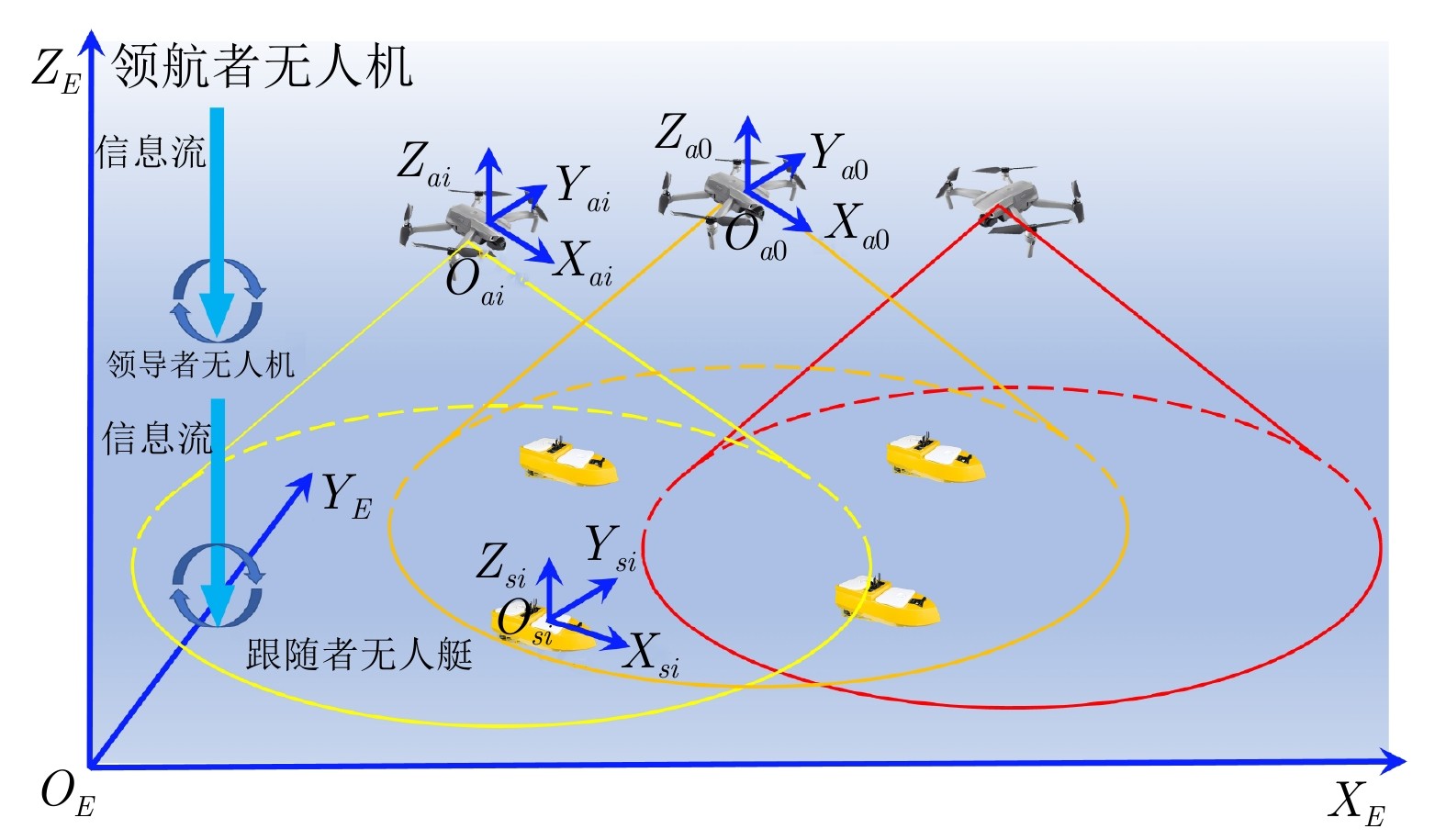
图 1 无人机/无人艇异构系统
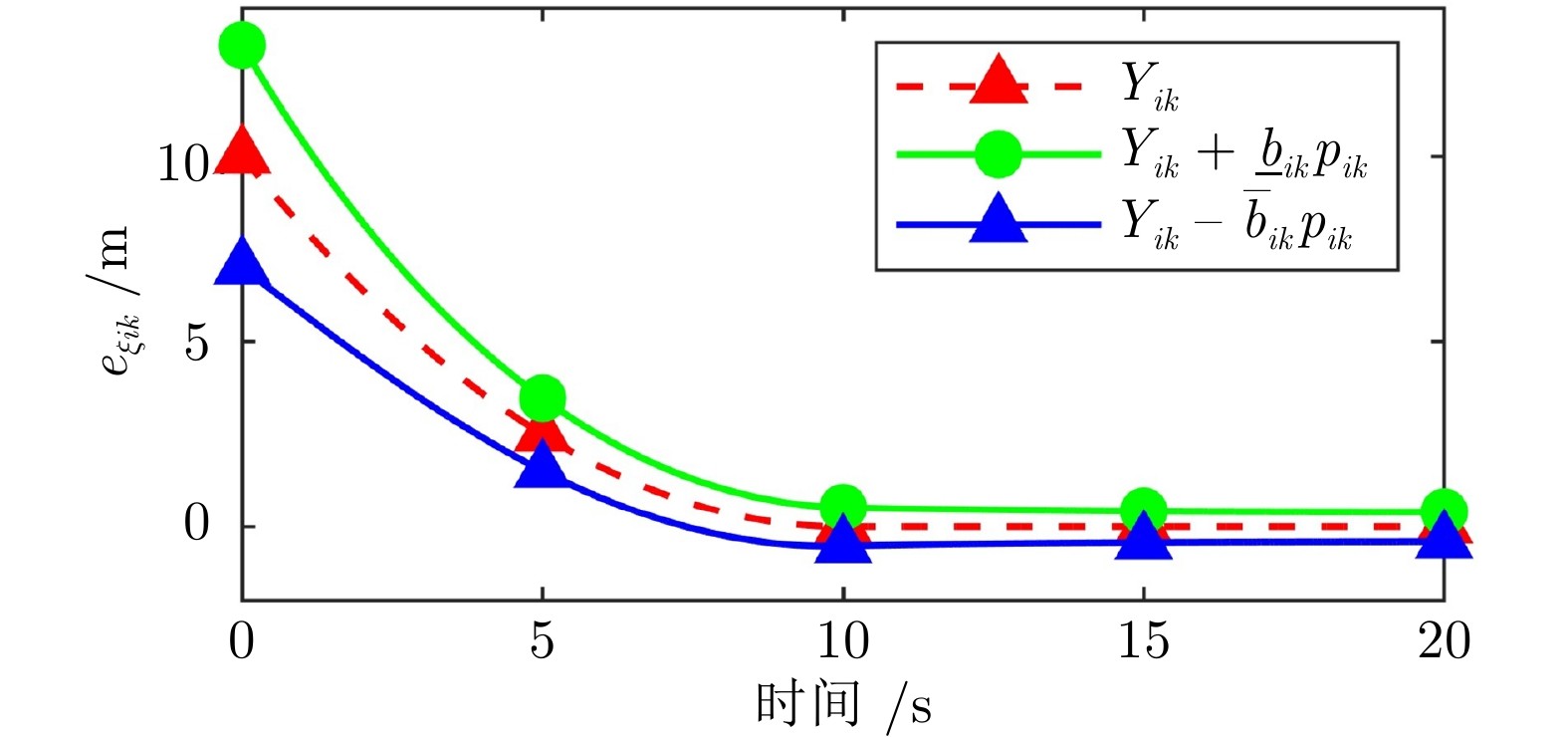
图 2 预设性能演化控制

图 3 预设性能控制
本文对执行器故障的无人机/无人艇异构协同系统编队包容控制问题进行研究, 提出一种固定时间预设性能演化控制方法. 本文利用演化路径理论为编队误差收敛提供平滑的参考轨迹, 并设计预设性能函数限制编队误差状态与参考轨迹的距离, 为基于视觉的相对位置测量提供有利的条件. 本文利用动态面控制和自适应技术设计性能函数转换后的误差动力学控制律, 使具有未知故障和干扰的闭环系统误差信号最终一致有界, 进而保证编队误差的固定时间稳定性. 仿真实例中包含定速和变速两种情况, 验证了本文所提方法的有效性.
作者简介
袁洋
北京航空航天大学自动化科学与电气工程学院博士后. 主要研究方向为无人系统仿生自主控制. E-mail: yyuan@buaa.edu.cn
段海滨
北京航空航天大学自动化科学与电气工程学院教授. 主要研究方向为无人机集群仿生自主飞行控制. 本文通信作者. E-mail: hbduan@buaa.edu.cn
魏晨
北京航空航天大学自动化科学与电气工程学院副教授. 主要研究方向为多智能体系统控制与非线性系统控制. E-mail: weichen@buaa.edu.cn
转载本文请联系原作者获取授权,同时请注明本文来自Ouariel科学网博客。
链接地址:https://wap.sciencenet.cn/blog-3291369-1491185.html?mobile=1
收藏