
引用本文
郜晨, 何潇, 周东华. 基于PI结构的多智能体系统容错一致性控制. 自动化学报, 2025, 51(3): 570−576 doi: 10.16383/j.aas.c240474
Gao Chen, He Xiao, Zhou Dong-Hua. Fault-tolerant consensus control of multi-agent systems based on PI structure. Acta Automatica Sinica, 2025, 51(3): 570−576 doi: 10.16383/j.aas.c240474
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c240474
关键词
多智能体系统,容错一致性,PI控制,执行器故障
摘要
针对无领航者多智能体系统(Multi-agent systems, MASs)以及领航−跟随多智能体系统执行器故障问题, 设计基于PI结构的容错控制律. 考虑到传统的比例型控制律无法消除加性干扰影响下的稳态误差, 引入积分环节, 在一致性控制律中融入状态的积分项, 用于改善多智能体系统一致性过程的稳态性能. 针对领航者输入不为零的情况, 设计非线性的一致性控制律, 并借助黎卡提方程以及Lyapunov函数, 进行多智能体系统在故障情况下的一致性分析和控制律设计. 最后, 通过一系列对比仿真, 说明了所设计控制律在改善系统稳态性能方面的优势.
文章导读
多智能体系统(Multi-agent systems, MASs)是由多个具有感知、认知、控制与行为等能力的自主运动体构成的一个整体. 个体之间通过局部相互作用, 使整个系统在宏观上涌现出复杂、有效、强大的智能行为. MASs的三个基本要素为智能体、交互方式和行为规则, 三者相互耦合. 其中, 智能体是组成MASs的基本单元, 可以是无人机、卫星等; 交互方式用来描述智能体之间的相互作用关系, 如信息传输过程中的拓扑关系; 行为规则是指智能体接收信息之后的反应规则, 如控制律的生成规则. 根据行为规则的不同, MASs的控制问题可以分为一致性控制[1-3]、编队控制[4-5]、蜂拥控制[6-7]等. 其中, 一致性控制是指通过设计分布式控制律使得所有个体在某些变量上达成一致, 除了在MASs控制领域的应用外, 一致性控制在传感器网络和时钟同步等领域均有广泛的应用.
目前MASs一致性控制的研究成果多集中在比例(Proportion, P)型控制律的设计上, 对于多输入多输出(Multi-input multi-output, MIMO)系统而言, 我们将控制律的生成只与当前状态/输出值有关的控制律称之为P型控制律. 这种基于状态/输出的P型控制律结构可以解决MASs在初始偏差下基本的一致性控制问题, 但是, 在一些情况下, 这种P型结构不足以支撑最终的一致性. 例如, 当存在加性干扰或故障时, 在P型结构的控制律下只能得到有界一致性, 无法消除稳态误差. 针对类似的情况, 可以引入状态的积分项, 利用积分环节在一定程度上改善系统的稳态性能.
事实上, 比例积分微分(Proportion-integration-differentiation, PID)型控制律是目前应用最为广泛的控制结构, 其结构简洁、易于实现并且具有较强的鲁棒性[8-9]. PID控制律的设计难点在于PID参数的调节, 尤其是针对MIMO系统. 在时域中, 目前常用的方法是基于线性矩阵不等式(Linear matrix inequalities, LMIs)的方法, 首先将比例、积分(或求和)和微分(或差分)项进行增广, 然后针对增广后的系统进行控制律设计[10-12]. 其中, 文献[10]和文献[11]针对一般线性离散的MIMO系统, 给出了基于LMIs的PID参数设计方法, 并将其推广到$ H_2 $以及$ H_\infty $控制问题中. 文献[12]针对网络化系统, 给出了固定步长积分的PID型控制律设计方法. 相比于单个MIMO系统, MASs可以看成是包含了拓扑结构信息的MIMO系统. 文献[13]针对一般线性离散MASs, 借助LMIs给出了无领航者以及领航−跟随一致性控制问题中PID型控制律的设计方法.
上述成果均是基于理想执行器的假设, 当PID型控制结构遇到执行器故障时, 已有的设计方法将不再适用. 执行器由于其连续不断地做机械运动, 因此出现故障的可能性极大, 执行器故障会对系统产生巨大的影响: 乘性故障会影响系统的稳定性, 加性故障会影响系统的稳态误差. 尤其在MASs的背景下, 如果个体的故障没有得到及时处理, 会通过拓扑传递影响到其他个体的运动, 从而对整个MAS造成影响. 目前MASs的容错一致性控制方法包括主动容错方法和被动容错方法[14-15], 主动容错控制需要设计适当的故障诊断单元, 预先完成对故障信号的检测、分离和辨识, 并利用获取的故障信息对控制器的参数或者结构进行实时调整[16-18]; 被动容错控制不需要故障诊断单元, 在控制律设计时需要综合考虑系统正常运行和发生故障的情况, 在线运行时控制律结构不会发生改变[19-21]. 主动容错控制具有较好的动态性能, 但是控制律的切换可能诱导出不稳定的现象, 特别是针对非线性系统. 此外, 主动容错控制的性能依赖于故障诊断单元的性能, 如故障检测的效率、漏报率和误警率、故障估计的准确度等, 而对于执行器的乘性故障, 尤其是快速时变故障, 几乎不可能得到精准的估计, 因此本文重点研究被动容错框架下的一致性控制问题.
考虑到实际环境中噪声/干扰的存在, 微分环节的引入会放大噪声/干扰的影响, 因此, 本文重点考虑PI型的控制律. 与现有成果对比, 本文的主要贡献包括: 1) 不同于常见的一阶、二阶积分MASs, 本文针对一般线性MASs, 给出了PI型控制结构的容错一致性控制律设计方法; 2)重点针对领航者输入不为零的情况, 设计PI型非线性容错控制律结构, 并借助黎卡提方程进行控制律参数的设计.
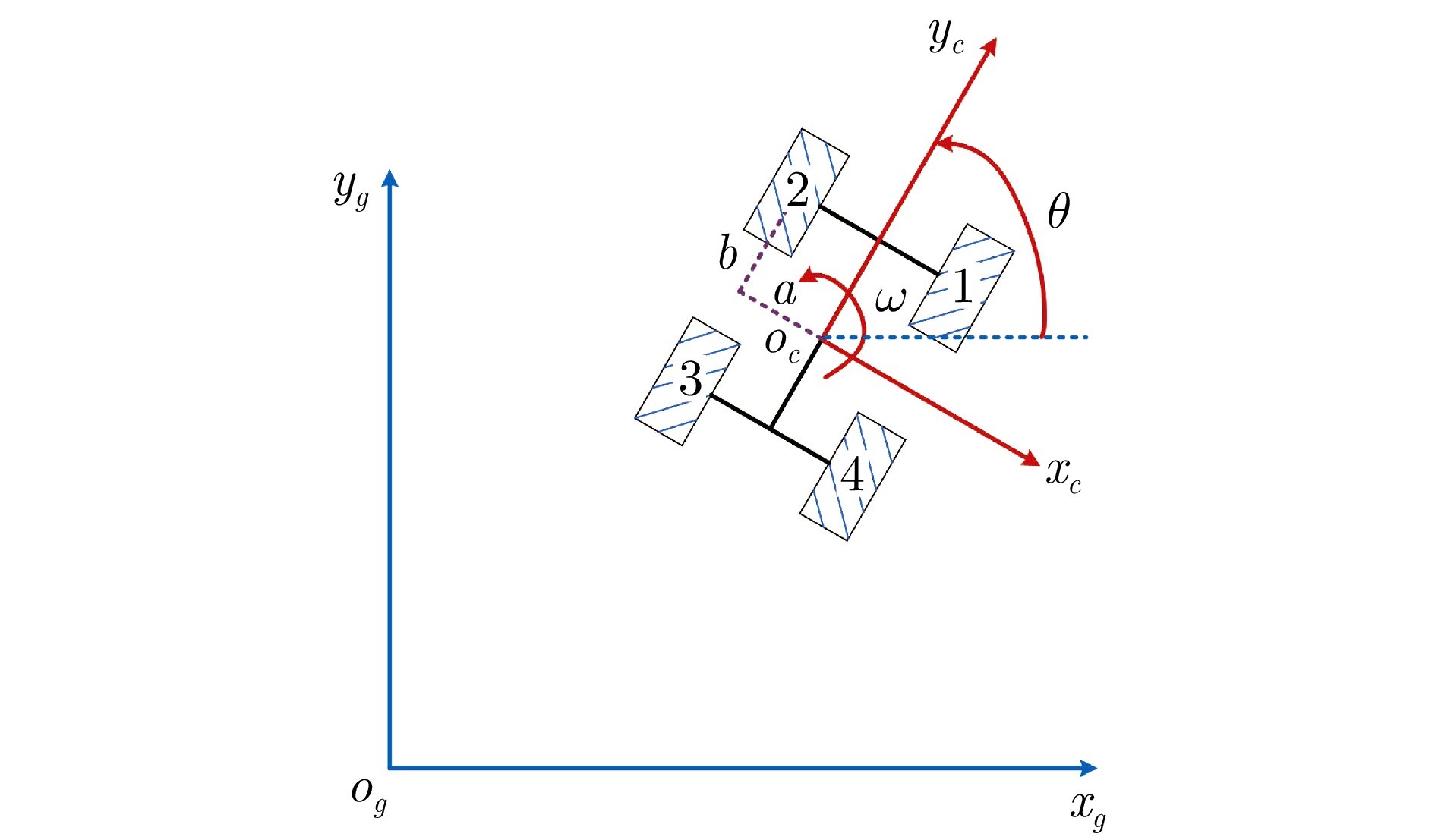
图 1 无人车车体坐标系
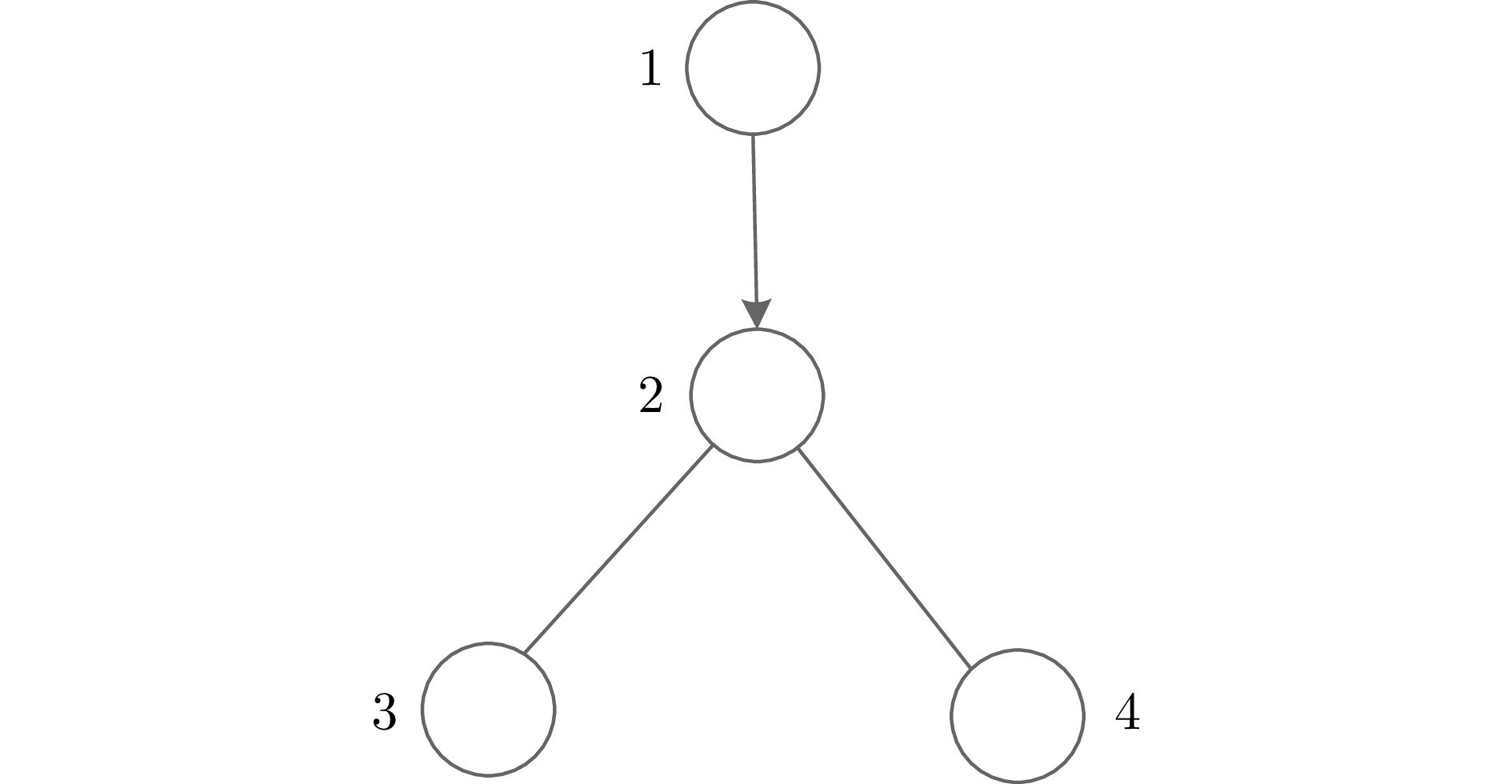
图 2 拓扑结构
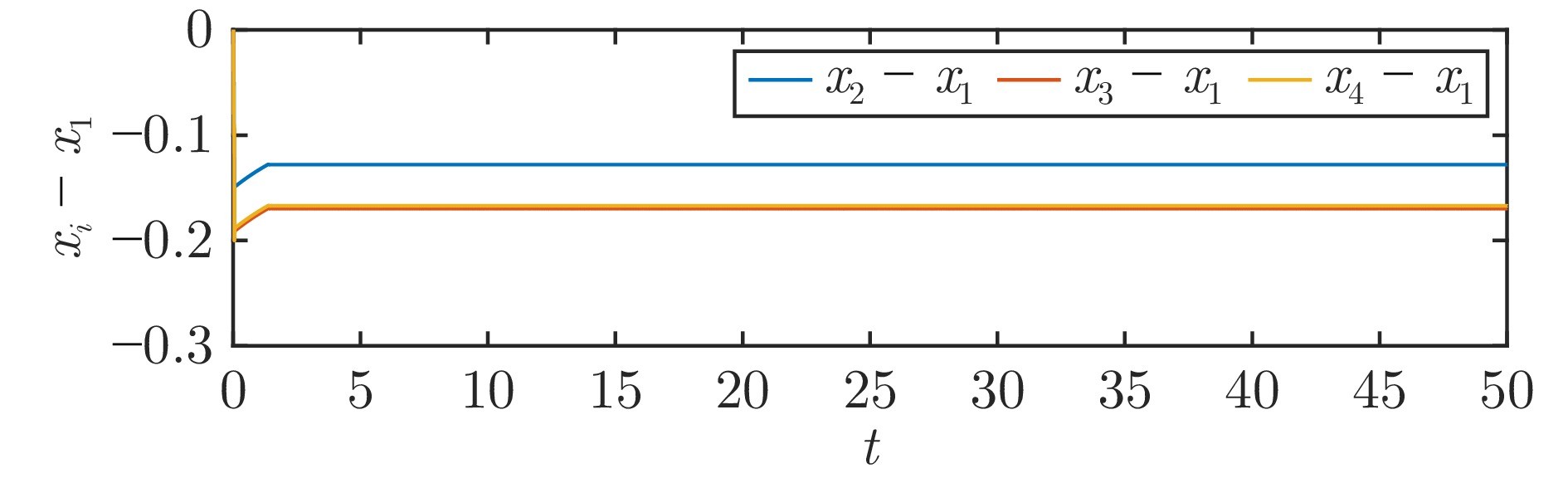
图 3 P型控制律下的一致性误差曲线图
本文针对一般线性无领航者MASs以及领航−跟随MASs, 设计了一种PI型的容错一致性控制律. 首先通过构造一个带有积分项的增广状态向量, 将PI型的控制律设计问题转化为增广系统的容错控制律设计问题, 并借助黎卡提方程进行控制律的参数设计. 特别地, 针对领航者输入不为零的情况, 引入非线性项处理未知输入. 通过对比P型控制律和PI型控制律的仿真效果, 可以发现, PI型控制律在应对时不变加性故障方面具有独特的优势, 说明PI型控制律在一些情况下具有更好的鲁棒性.
作者简介
郜晨
南京理工大学自动化学院教授. 2021年获得清华大学博士学位. 主要研究方向为分布式系统的隐私保护与容错控制. E-mail: chengao@njust.edu.cn
何潇
清华大学自动化系长聘教授. 2010年获得清华大学博士学位. 主要研究方向为动态系统的故障诊断与容错控制. 本文通信作者. E-mail: hexiao@tsinghua.edu.cn
周东华
东南大学和清华大学教授. 1990年获得上海交通大学博士学位. 主要研究方向为动态系统的故障诊断与容错控制, 故障预测与最优维护技术. E-mail: zdh@tsinghua.edu.cn
转载本文请联系原作者获取授权,同时请注明本文来自Ouariel科学网博客。
链接地址:https://wap.sciencenet.cn/blog-3291369-1482825.html?mobile=1
收藏