博文
四轴飞行器—倒立摆系统的控制算法研究
|||
四轴飞行器—倒立摆系统的控制算法研究
孔凡国, 李肇星, 张健存, 熊刚, TimoR.Nyberg

【摘要】四轴飞行器控制活动杆件或装水酒杯平衡是一项难度系数极大的任务,所构成的模型称为四轴飞行器—倒立摆不倒平衡控制系统。基于这种特殊形式的倒立摆不倒平衡控制模型,在X-Z平面简化为线性不倒模型进行分析,建立其动力学模型,并结合滑模控制的算法,设计系统的控制器并进行仿真实验。利用滑模控制算法对四轴飞行器—倒立摆不倒平衡控制系统进行控制,实验结果表明,其表现出了优异的不倒稳定性。
【关键词】 四轴飞行器 ; 倒立摆 ; 滑模控制 ; 仿真实验
引用格式 孔凡国, 李肇星, 张健存, 熊刚, TimoR.Nyberg.四轴飞行器—倒立摆系统的控制算法研究. 智能科学与技术学报[J], 2019, 1(2): 140-144
Research on control algorithm of a four axis air vehicle-inverted pendulum system
Abstract Controlling the balance of a movable rod or a wine cup filled with water on a four axis air vehicle is a hard job.A system called four axis air vehicle-inverted pendulum balance control system is needed.With this special kind of balance control system and the idea of a simplified model to replace the complex system for analysis,the performance of a linear four axis vehicle-inverted pendulum on X-Z plane was studied,its dynamic and physical formula was also discussed.The simplified model equipped with the control algorithm of sliding mode control was designed and simulated on the computer with the help of MATLAB.The result shows that the control algorithm works well on the four axis air vehicle-inverted pendulum balance control system and the system has a good performance.
Keywords: four axis air vehicle; inverted pendulum; sliding mode control; simulation experiment
Citation KONG Fanguo.Research on control algorithm of a four axis air vehicle-inverted pendulum system. Chinese Journal of Intelligent Science and Technology[J], 2019, 1(2): 140-144
1 引言
基于良好的可操作性和简单的构成,四轴飞行器已经成为近年来一个非常热门的研究对象。早期一些关于四轴飞行器的研究项目倾向于利用简单的线性模型实现四轴飞行器的近悬停[1]。近年来,越来越多的研究者对四轴飞行器的全动态性能进行了相关的分析和研究,使得其能够实现一些更为复杂且要求更高的任务行为,例如,接球、高速度翻转、负载运行、抛接球或支撑活动杆件等[2]。相比于传统形式的倒立摆不倒平衡系统,本文研究的是四轴飞行器—倒立摆系统及其在滑模控制算法下表现出来的性能。使用计算实验替代对物理系统的模拟,使得复杂问题的解决过程变得可控、可观并且可重复,同时解决方案也具有可修改和可重复的特性,从而满足了求解科学方法的基本要求[3]。由于整个系统建模的难度系数大,因此,将系统在X-Z 平面进行简化,使其变为线性不倒平衡模型,进而获得相应的动力学模型,继而利用滑模控制算法进行控制器的设计以及仿真实验。
2 动力学模型的建立
对于四轴飞行器—倒立摆系统,如果限制系统的载体四轴飞行器在Z方向上的运动,只让四轴飞行器在X-Y平面上运动,那么此系统与一般的小车倒立摆杆件不倒平衡系统相似,是线性倒立摆不倒平衡系统,优化分析方便。鉴于四轴飞行器—倒立摆系统的研究难度很大,本文对其在X-Z平面上进行简化(如图1 所示)。简化后的系统具有良好的分析性能和线性操作性,结果也趋于实际效果,简化系统可以用一个X-Z平面倒立摆模型来近似。
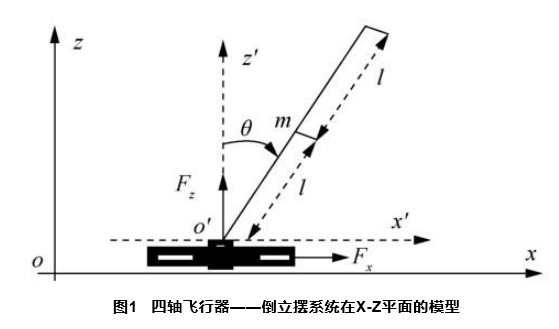
图1所示为系统在任意时刻的受力状态,可将力分解在相应的坐标下,Fx为水平方向上的分力,Fz为竖直方向上的分力。在X-Z平面上研究该系统的控制行为,除了具有水平方向上的位移x,还有竖直方向上的位移z。所以,该系统在此平面上有 x、z、θ三个自由度以及两个控制输入变量Fx和Fz,相关参数见表1。
系统的各阶物理量如式(1)所示。

3 基于滑模控制算法的不倒平衡控制器设计
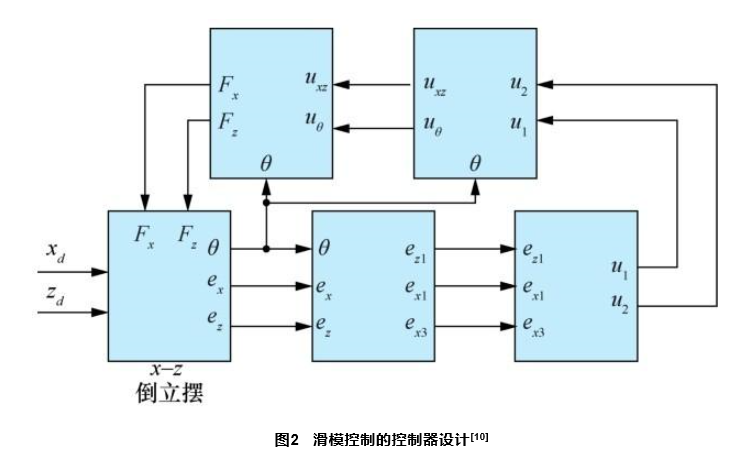
所以,基于上述滑模控制算法对系统进行控制设计,应用MATLAB软件中的Simulink工具建立系统的不倒平衡控制器[9](如图2所示),在软件上对各模块进行线路的一一对应连接。
4 系统的仿真实验

将以上参数代入第3节所述算法可得滑模控制器所需数据,将数据写入程序后,操作软件运行系统的不倒平衡控制器,最终得到各输出参数的响应曲线如图3所示。
从图3所示的四轴飞行器—倒立摆系统的简化模型的滑模控制仿真结果可以看出:系统的各个输出变量在5 s内能达到收敛状态,且响应速度快,但在系统控制的过程中会出现一定的超调量。滑模控制算法对倒立摆系统的稳定回位、快速响应都表现出了很好的控制性,且具有较好的稳健性。

5 结束语
本文利用滑模控制算法原理,对四轴飞行器—倒立摆系统在X-Z平面上的简化模型进行了控制器的硬件及算法设计,并进行了仿真实验。由实验结果可知:滑模控制算法对倒立摆系统的稳定回位、快速响应都表现出了很好的控制性,且具有较好的稳健性,达到了实验的预期效果。实验结果也进一步验证了所建系统动力学模型的合理性,为四轴飞行器—倒立摆系统的综合完整控制实验提供了一定的理论基础和指导意义。

https://wap.sciencenet.cn/blog-951291-1201357.html
上一篇:基于积分反步法的四旋翼飞行器控制设计
下一篇:用于轻度认知障碍诊断的群体相似约束功能脑网络建模方法