博文
GrafNav/GrafNet/GrafMov软件
||
GrafNav /GrafNet软件
GrafNav / GrafNet是基于Windows环境设计开发的GPS / GLONASS事后处理软件包。它采用先进的算法,可处理GPS单频、双频和GLONASS系统的测量数据,解算速度快,精度高。这个软件有两个型号可以选择,如果只需要静态处理功能,则只需要选择GrafNet即可;如果需要动态解算,则需要选择GrafNav/Net。
GrafNav /net
GrafNav/net是GPS动态和静态数据处理软件,可以非常方便地选择组合方式进行数据处理,得到厘米级的定位精度。同时它可以非常容易地将数据由静态模式变换到动态模式下进行数据处理,有助于用户在动态模式下修复其它不可恢复的周跳。软件中还包含有卫星预报菜单,利用该功能用户可以非常方便地计划测量的时间,将测量时段选择在卫星状况较好的情况下进行测量,从而取得更好的定位结果。
动态测量精度情况:
基线长度( km ) 单频精度 双频精度
短基线 0 ~ 5 2cm +1ppm 1+1.0ppm
中基线 5 ~ 35 5cm +4ppm 5cm +2ppm
长基线 35km 以上 10cm +4ppm 10cm +2ppm
GrafNet
GrafNet是多基线静态基线解算和网平差程序。它可以处理一个网中几天(或几个星期)测量所有静态基线,它的处理速度非常快,通常只需要几分钟。它有4种处理模式,即静态固定解、快速静态解、浮点解和无电离层影响解。
静态测量定位精度: 基线 长度( km ) 观测时间 单频精度 双频精度
基线 长度( km ) 观测时间 单频精度 双频精度
短基线 0 ~ 10 10 ~ 30min 1cm +1.0ppm 1cm +1.0ppm
中基线 10 ~ 100 30min ~ 4h 2cm +3ppm 2cm +0.5ppm
长基线 100km 以上 6 ~ 12h 2cm +1ppm 2cm +0.1ppm
GrafMov
GrafMov是加拿大专业GPS软件公司开发的GPS/GLONASS事后处理软件包,GrafMov包括了GrafNav/Net的所有功能,并增加了动态基线的处理功能,即移动基线处理与航向解算功能;
移动基线处理与航向解算
移动基线模块可以后处理两个移动平台的GPS数据。通过直接处理两个处于动态的数据,相对轨迹的精度比使用静态基准站处理有了显著提高。在基准站距离远大于相对距离时尤其如此。如果两个天线是固定安装的。则可以同时计算航向。移动基线模块可以作为 GrafNav/GrafNet 的升级版购买,其增加的功能还有:
相对处理 - 支持 GrafNav 中的所有高级性能,包括: KAR 、可靠的卡尔曼滤波、前向 / 后向 / 组合处理、双频与单频以及快速处理
相对向量输出 - GrafMov 能输出许多相对向量,包括: local level, ECEF, 距离和方位 .
相对速度 – 不仅是相对位置 , 同时也有瞬时的差分速度向量
航向解算 - 对于需要航向的应用, GrafMov的快速模糊度分辨算法(即 KAR )可以利用天线的距离加快初始化时间。俯仰角可以从相对矢量中计算出来。
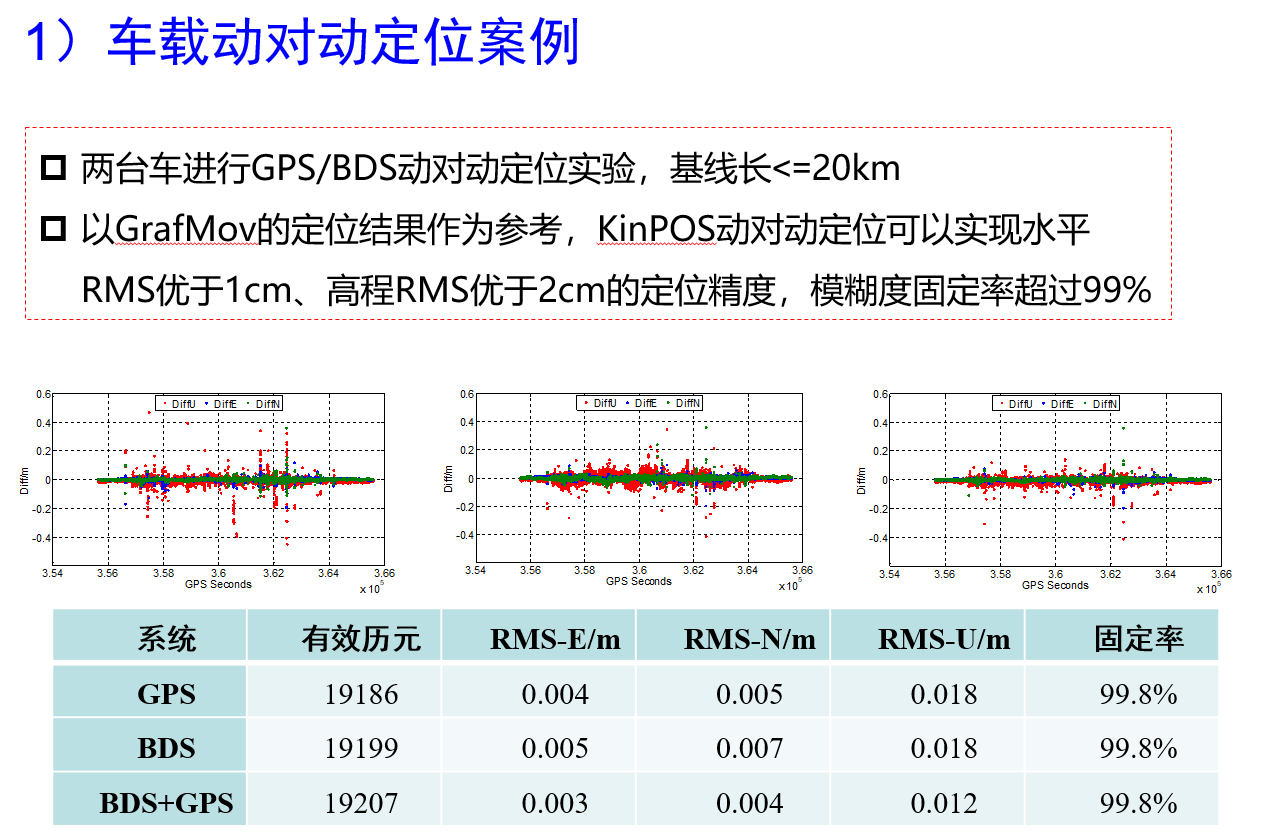
可以支持动对动相对定位解算(KinRTK)

https://wap.sciencenet.cn/blog-858128-1273064.html
上一篇:正确率Accuracy VS 准确率Precision
下一篇:matplotlib安装错误